面向机动飞行的固定翼无人机位姿跟踪控制
2023-02-09喻煌超彭羽凡王祥科
喻煌超,曹 粟,彭羽凡,王祥科
(国防科技大学智能科学学院,湖南长沙 410073)
1 引言
随着任务场景的日益复杂,无论是未来的无人机空中格斗,还是复杂危险环境快速穿越,都要求无人机在平稳飞行的基础上,进一步具备自主机动飞行的能力.然而,无人机在机动飞行过程中,其位置与姿态均快速变化,这一运动相较于常规飞行更为复杂.如何利用机体产生的控制力矩与控制力,实现六自由度空间内位置与姿态跟踪,对底层飞行控制系统的设计提出了挑战.
本文就固定翼无人机机动飞行控制问题开展研究.当前针对固定翼无人机机动飞行的控制方法,主要思路为位置-姿态解耦控制[1-2].这一方法与通用的飞行控制思路一致,无人机的位置与姿态分别在外环与内环进行控制.通过将机动飞行期望位置轨迹作为外环输入,设计外环的位置跟踪算法.进而根据当前的位置跟踪误差,实时生成当前的期望姿态,并在内环设计姿态控制器进行跟踪.该方法具有简洁直观、内外环可分开调试的优势,因此在无人机机动飞行控制中得到较多应用.Park[3]基于这一思路,提出了L1机动飞行控制律,并设计了三维机动路径跟随算法,实现了多种机动动作跟踪控制.Levin等[1]同样基于路径跟随的思路,根据当前的航向与位置跟踪误差,生成期望的姿态四元数,并将其附加到期望四元数指令之中.路径跟随算法对于较远距离的目标点跟踪比较稳定且精度较高.然而,针对机动控制这一任务,路径跟随算法在姿态跟踪中存在一定滞后,难以实现剧烈的机动动作.因此,相应的轨迹跟踪算法逐渐得到关注.Tal和Karaman[4]首先依托小型旋翼无人机,设计基于比例-微分方法的位置与速度控制律,并在此基础上设计姿态和角速率的动态逆控制,最后设计基于增量式动态逆的角加速度与线加速度控制器.飞行试验结果证明了分层控制方法的有效性.Tal和Karaman继续沿用这一思路,在文献[5]中将被控对象替换为更为复杂的尾座式无人机,同样实现了精巧复杂的机动动作.Bry等[6]聚焦于小型固定翼无人机的室内机动,利用微分平滑理论,将固定翼无人机模型进一步简化,实现了诸如急速回旋等动作.然而,由于固定翼无人机自身的非完整约束,微分平滑理论难以契合实际模型运动规律,难以实现固定翼无人机的复杂机动控制.
上述位置-姿态分层控制的思路虽已在机动飞行中得到一定应用,但未能兼顾无人机的位置、姿态同步响应的需要.近年来,位姿一体化控制方法逐渐受到关注.在该控制律的设计中,不会将位置与姿态解耦控制,而是作为统一的状态量考虑.这一思路起源于空间机器人操作控制,相关研究主要应用于在轨服务、空间机器人抓捕、航天器对接[7]等零(微)重力环境.在这些场景中,由于航天器自身通常安装了反作用控制系统(reaction control system,RCS),可以实现六自由度空间的各向运动.近年来,对偶四元数凭借其无奇异点、表达方式简洁等优势,在位姿同步耦合同步控制中崭露头角,并在卫星姿轨同步控制、四旋翼同步控制问题上有了较多应用.因此,本文引入对偶四元数,研究如何解决固定翼无人机高速机动阶段快速、精确的位置姿态跟踪控制问题.当前基于对偶四元数的位姿耦合控制方法已有一定研究成果,主要包括比例-微分、滑模变结构、反馈线性化等.针对六自由度的飞行器运动控制问题,Brodsky和Shoham[8]首次基于对偶质量算子,提出了对偶四元数表示的六自由度运动学与动力学模型.文献[9]将交会对接过程中航天器的平移、旋转和柔性控制问题建模为统一的最优控制问题,在此基础上最小化相对位置、相对姿态和弹性结构颤振.文献[10]则聚焦于航天器在轨服务和空间碎片清理任务,将空间中目标的位姿估计与自身位姿跟踪控制结合,实现了多种尺寸与形状的目标抓取.考虑到规避空间碎片,文献[11]将障碍规避引入到航天器位姿一体化控制之中,并利用人工势场函数实现了航天器最优位姿跟踪.文献[12]针对航天器的交会对接中的奇异值问题,利用滑模方法,避免了反馈线性化中传统的对偶四元数对数操作,从而提高了计算效率,并确保了稳定的跟踪和对接过程.文献[13]在机器人机械臂操作的过程中,利用对偶四元数来描述期望的末端执行器的运动轨迹,并引入反馈线性化方法实现快速稳定跟踪.由此可见,面向位姿一体化需求开展控制律设计,已逐渐成为飞行器控制的重要研究方向.由于无人机在机动飞行中随着姿态的改变,自身位置会由于气动力的变化而偏移,存在较强的位姿耦合现象.针对机动飞行开展位姿一体化控制律设计,有望为无人机自主机动研究提供新的思路.然而,目前鲜有研究聚焦于无人机平台[14],更少有固定翼无人机的位姿跟踪控制的相关成果.在文献[15]中,Zhao等针对固定翼无人机协同编队飞行,提出了位姿一体化建模方法,并设计了一种基于对偶四元数的最优轨迹规划与跟踪控制算法.然而,如何实现面向机动飞行的固定翼无人机位姿一体化控制,仍是尚未解决的问题,值得进一步探索和研究.
针对现有固定翼无人机机动飞行控制问题,考虑位姿同步跟踪需要,本文旨在提出一种适用于固定翼无人机机动飞行的位姿耦合控制方法.首先,针对底层位姿一体化控制问题,本文建立基于对偶四元数的固定翼无人机位姿耦合模型.然后设计虚拟坐标系,并在此基础上设计增量式反步法控制律.根据数值仿真与半实物仿真结果,无人机可实现典型机动动作跟踪,验证了本文设计的位姿耦合控制方法的可行性.
2 基于对偶四元数的固定翼动力学模型
固定翼无人机在机动飞行过程中,其位置和姿态可在位形空间表示.位形空间是一特殊SE(3)欧式空间,该空间由机体坐标系相对于惯性坐标系的位置子群和旋转子群半直积得到.位形g包含位置p ∈R3与姿态R ∈SO(3)两个部分,其分别表示无人机机体相对于惯性坐标系的位置和姿态.在本文中,定义惯性坐标系FI、无人机的机动飞行期望坐标系FD以及无人机的机体坐标系FB.为避免机动过程中出现奇异值问题,同时针对位置和姿态进行耦合控制,本文利用对偶四元数建立固定翼无人机的刚体六自由度运动学与动力学模型.具体的,坐标系FA与坐标系FB之间的相对位姿可定义为其中为实对偶数集[16].
其中:∨是叉乘算子,⊗为对偶四元数乘法运算符.进而可以得到固定翼无人机的动力学方程如下:
此处证明略,对伴随算子直接展开推导可以得到.
最终可以得到关系式
引理2得证.证毕.
3 虚拟坐标系设计
本文为解决固定翼无人机机动飞行中的欠驱动问题,提出适用于常规机动飞行场景的虚拟坐标系FV,具体设计方法如下.虚拟坐标系坐标系FV和机体坐标系FB的相对位姿定义为
进而可以得到坐标系FV相较于惯性坐标系的动力学方程为
由上式可知,无人机产生的控制力矩在FV的虚部产生控制分量这样可以使得无人机的位移上的欠驱动性被补偿,进而将原本的欠驱动模型转为了全驱动模型.此外,在机动飞行中关键的滚转角指令,需要中的x方向分量单独进行跟踪.上述的虚拟坐标系方法可以实现绝大多数的机动动作跟踪控制.
4 位姿控制器设计
底层位姿跟踪控制是实现无人机自主机动飞行的关键.针对无人机机动飞行控制,动态逆方法在已有的机动飞行研究中有较多应用,该方法能够根据输入的期望指令,通过反馈线性化,得到期望的控制输出.该方法也存在不足,其过于依赖被控对象模型的精确性[2].而无人机大角度机动过程中,飞机模型会呈现很大程度的非线性特性.本文基于已有的虚拟坐标系中的对偶四元数模型,提出基于传感器的增量式控制方法,进而设计一种兼顾鲁棒性与响应速率的控制器.
位姿跟踪误差可以因此表示为
计算FV坐标系中跟踪误差状态方程为
在基于对偶四元数的控制器设计中,位姿跟踪误差的度量函数设计十分重要,本文参考了四元数的误差度量函数,设计对数位姿跟踪误差为
该位姿跟踪误差对数运算有如下性质.
引理3位姿跟踪误差可以利用矩阵关系式运算表示为
式(21)中位姿跟踪误差的导数可以表示为
由上式,引理3得证.证毕.
假设1在固定翼无人机控制中,位姿的响应速率要远小于旋量的响应速率.此外,和旋量的响应速率相较而言,作动器的响应速率可忽略不计.因此,可引入经典的时标分离法开展机动飞行控制器设计.
内环旋量跟踪控制采用增量式反步法计算,首先,将式(19)在t0时刻的状态点展开可以得到
根据假设1,式(26)可以近似表示为
其中d(x)是高阶非线性未知项.由上式,内环控制律设计如下:
其中:KM1,KM2为正定对角矩阵.
代入可得
最后,可以得到李雅普诺夫函数V1的导数为
可得到高阶非线性项的关系式如下:
其中ς1>0,因此可得V1导数的关系式为
5 数值仿真试验
5.1 仿真设置
其中:Cx,Cy和Cz为气动力系数,Cl,Cm和Cn为气动力矩系数.本文在仿真验证中,将根据已知的气动模型,计算得到副翼δa,升降舵δe,方向舵δr的增量,具体增量式舵面的计算方法可见文献[2].针对机动动作的复杂性,本文采用模仿学习的思想,记录飞行员实际飞行的机动轨迹参数,经过滤波与学习后,将其作为仿真系统的期望位姿输入,从而得到多种纷繁复杂的机动动作指令,具体学习与生成过程可见文献[17].
5.2 仿真结果及分析
在数值仿真中,与经典的L1机动飞行控制方法[3]开展对比试验.由于文献[3]中并未使用对偶四元数方法进行建模,在仿真中,将SO(3)中的姿态指令与R3中的位置指令解耦后作为L1机动飞行控制律的期望.设置英麦曼回旋为期望机动动作,其包含大角度爬升及快速滚转拉平阶段,位姿指令与旋量指令将直接发送给控制器作为参考输入.针对仿真结果,设计两种跟踪性能评价指标:平均姿态跟踪误差(mean attitude tracking error,MATE)与平均位置跟踪误差(mean position tracking error,MPTE),分别定义为
图1-4为本文的机动飞行跟踪控制算法得到的数值仿真结果,分别对应于SE(3)空间的位姿跟踪、位置跟踪、姿态跟踪与旋量跟踪的仿真曲线.从图1可以看出,在无人机只有4个独立控制输入的条件下,本文所设计的基于虚拟坐标系的增量式控制器仍可以使其稳定的跟踪给定的SE(3)的机动飞行轨迹.此外,在无人机爬升到最高点时,无人机可完成180°的滚转动作,这表明,设计的独立的滚转控制通道可以有效控制无人机完成除位置外的姿态跟踪,同时在另外两个控制力矩的作用下,无人机可以在跟踪期望轨迹的同时保持较小的横向偏差(最大偏差<2 m).从图1可知,本文的方法(紫色曲线)得到的飞行轨迹与期望轨迹(黑色虚线)几乎重合,相较于L1方法(图中红色曲线)跟踪精度显著提升.

图1 英麦曼回旋SE(3)空间跟踪结果Fig.1 Tracking results of immelman turn in SE(3)
从图2看出,本文的控制方法同样取得了较好的欧拉角跟踪效果.在t=2.0 s附近,无人机开始快速抬头并爬升,直到t=5.0 s时达到90°.在爬升过程中,无人机滚转角和偏航角首先稳定在0°附近,然后迅速增加.值得一提的是,在t=7~8 s时,欧拉角出现了一定振荡.这是由于t=7 s时无人机的空速降到最小值,导致舵效极大地降低.此时由于空速减少,升降舵的舵效降低导致俯仰角跟踪同样出现误差,如图5所示.在爬升至顶点后,无人机在1 s内快速滚转恢复平飞.
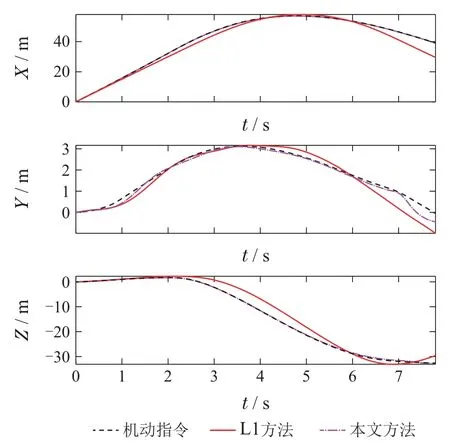
图2 英麦曼回旋位置跟踪结果Fig.2 Position tracking result of Immelman turn
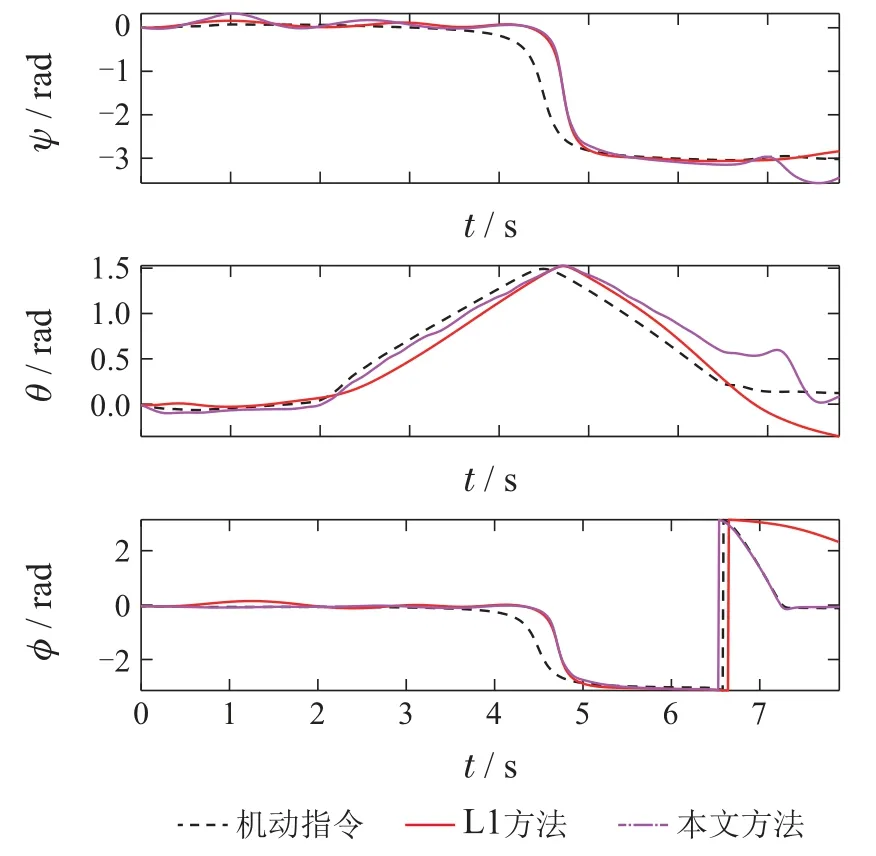
图3 英麦曼回旋欧拉角跟踪结果Fig.3 Attitude tracking results of Immelman turn
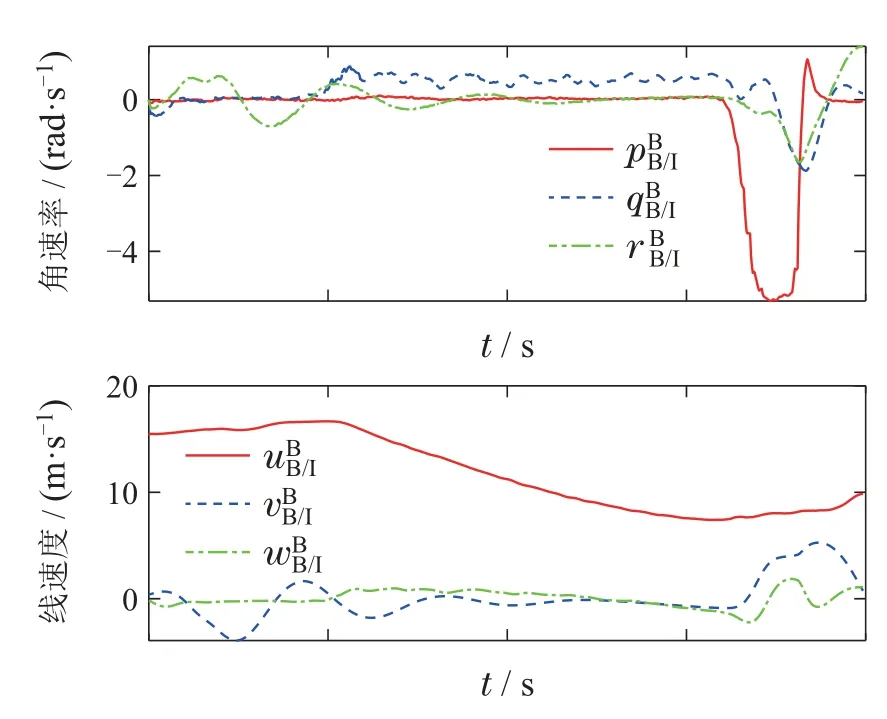
图4 英麦曼回旋旋量仿真结果Fig.4 Results of the twist during Immelman turn
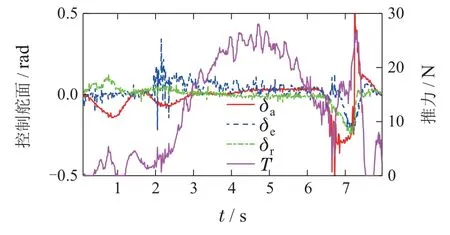
图5 英麦曼回旋控制输出Fig.5 Control outputs of Immelman turn
在英麦曼回旋基础上,对另3种典型机动动作开展仿真和跟踪精度统计,分别为Split S,Yoyo和滚筒(具体机动轨迹特征可见文献[18]).统计仿真中姿态与位置跟踪误差如表1所示.从结果可知,无论是纵向平面的Split S机动,还是横纵向耦合的Yoyo和滚筒机动,本文方法都能实现位置与姿态稳定跟踪.相较于文献[3],位置和姿态跟踪精度均有明显提升.数值仿真证明了本文提出的位姿一体化控制方法可有效提升三维空间复杂机动的跟踪精度.
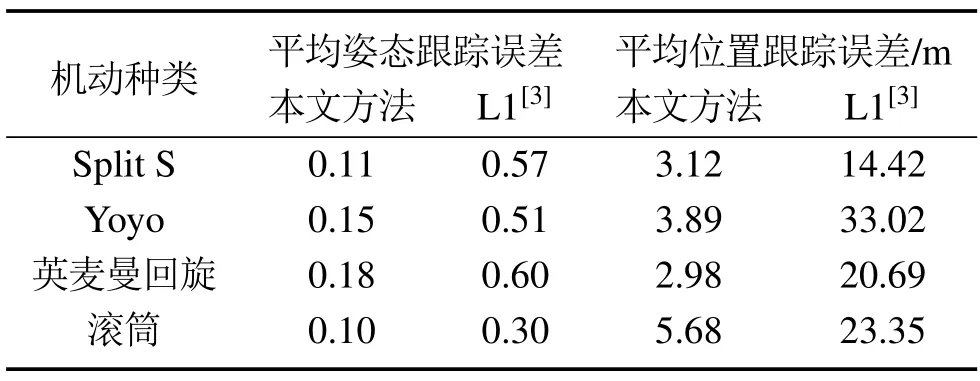
表1 机动飞行位姿跟踪结果比较Table 1 Comparison of the pose tracking results
6 半实物仿真试验
在数值仿真基础上,开展基于Pixhawk V5自驾仪与X-Plane仿真平台半实物仿真实验,以进一步验证控制方法的有效性.在试验中根据位置姿态与跟踪误差、旋量跟踪误差、超调量及收敛时间调节控制参数.半实物仿真系统由自驾仪(Pixhawk V5),X-Plane仿真飞行平台与地面控制站组成,如图6所示.基于开源地面站QGroundControl进行二次开发,设计接口实现地面站与X-Plane之间的机动指令发送、执行等通信问题.控制算法在自驾仪上实时运行,同时会接收由地面站转发的飞行状态信息.自驾仪中的机动控制算法分为机动指令生成模块与机动指令跟踪模块.生成模块接收地面站的机动开展指令后,实时计算期望的无人机位姿,跟踪模块则根据期望的位姿计算控制输出,经过通用串行总线发送给地面控制站,并由QGround-Control转发给X-Plane形成闭环控制回路.

图6 半实物仿真框图Fig.6 The hardware-in-the-loop simulation scheme
在数值仿真的基础上,开展纵横向耦合机动的半实物仿真,以分析滚转角与航向角同样变化的机动动作的控制器性能.为此,针对Yoyo这一滚转速度较低的耦合机动开展研究.在Yoyo机动中,无人机首先快速拉起爬升,然后快速滚转并改变航向,紧接着快速俯冲后改平.这一过程中,无人机通过损失速度来获得高度,并可在高点根据敌机位置进行俯冲攻击.
机动飞行轨迹与各时刻的姿态如图7-8所示.其中: 蓝绿色曲线表示期望轨迹,红黄色曲线表示实际飞行轨迹.可以看到,飞机在进入机动点后,依次完成爬升-滚转-俯冲这一完整过程,在三维空间中实现了剧烈的机动动作(无人机在x,y和z方向的最大位移均超过200 m),具备了Yoyo机动的全部特征.将无人机的位置与姿态跟踪结果绘制于图7.可以看到,无人机的姿态与位置均实现了稳定跟踪,其中MATE<0.2,MPTE<50 m,这表明针对三维空间中俯仰、滚转与偏航角均快速变化的复杂机动,本文方法可实现位姿同步稳定跟踪.

图7 Yoyo机动姿态与位置跟踪结果Fig.7 The attitude and position tracking result of Yoyo

图8 Yoyo机动飞行轨迹Fig.8 The pose trajectory of Yoyo
Yoyo机动的旋量跟踪结果如图9所示,在线速度与滚转角速率稳定跟踪的条件下,无人机可以实现俯仰角速率与偏航角速率的跟踪误差收敛,这一结果印证了定理1的结论.在t=5~7 s,无人机角速率p,q与r均较大,此时位姿与旋量跟踪仍保持平稳,控制精度较高.
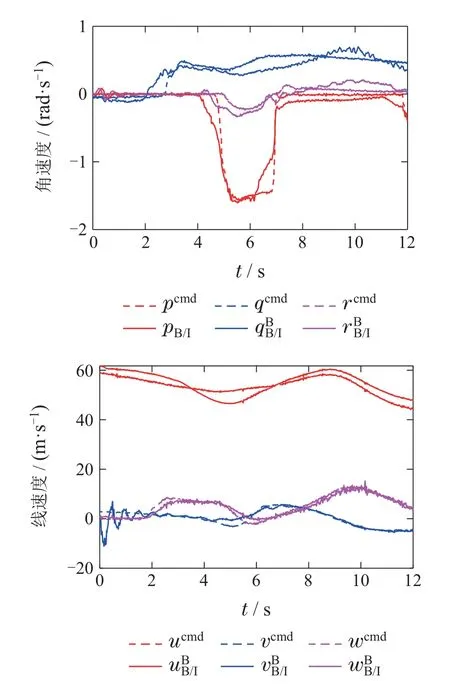
图9 Yoyo机动角速率与线速度跟踪结果Fig.9 The angular rates and linear velocities of Yoyo
7 总结
本文针对小型固定翼无人机自主机动飞行这一SE(3)空间复杂运动问题,考虑到无人机自身存在的欠驱动性,提出了一种基于对偶四元数的位姿控制方法.首先,基于对偶四元数建立固定翼无人机运动学和动力学模型.然后,引入虚拟坐标系方法,并设计增量式反步法控制律.利用外环动态逆控制器计算得到期望旋量,实现无人机旋量的稳定跟踪,进而实现位姿精确控制.针对多种示教的机动动作,开展数值仿真与半实物仿真试验.试验结果表明,本文方法可以有效针对多种三维空间经典位姿轨迹进行同步控制,满足机动飞行的位姿同步响应需求.
