基于因子图的导航定位技术应用分析与思考
2023-02-09潘献飞宁治文王茂松吴文启吴美平
潘献飞,宁治文,王茂松,吴文启,吴美平
(国防科技大学智能科学学院,湖南长沙 410073)
1 引言
任务与作业环境的复杂多变对导航、定位和授时提出了新的更高要求.目前,解决组合导航问题时,多采用基于卡尔曼滤波(Kalman filter,KF)及其各种变体的方法.卡尔曼滤波理论在1960年由Kalman提出,该理论基于状态空间模型,能实时进行滤波计算.卡尔曼滤波理论的核心思想是将系统视为一个线性高斯系统,通过建立信号与噪声的空间状态模型,利用过去的测量值和当下的测量值来更新状态变量的估计值,从而求出当前的估计值.这种滤波算法大大提高了滤波的实时性.然而,卡尔曼滤波理论主要适用于线性高斯系统,对于非线性系统则有较大局限性.为了解决这个问题,扩展卡尔曼滤波(extended KF,EKF)在20世纪90年代被提出,它将非线性模型分为若干线性区域,对每个线性区域使用卡尔曼滤波算法.虽然EKF对于弱非线性系统能得到不错的滤波结果,但对于强非线性系统的滤波效果并不理想.为了更好地解决强非线性问题,粒子滤波(particle filter,PF)与无迹卡尔曼滤波(unscented KF,UKF)被先后提出,虽然在一定程度上较好地解决了系统的强非线性问题,但也使得算法复杂度增加,消耗了更多的计算资源.
在滤波框架下,通常选择捷联惯性导航系统(strapdown inertial navigation system,SINS)为主系统,将全球卫星导航系统(global navigation satellite system,GNSS)等多源信息进行融合,从而对SINS进行修正,进而获得最优导航解.该方案主要有以下不足之处.
1)KF/EKF或PF方法在强非线性环境下的高精度导航中存在不足.在强非线性、非高斯环境中,对系统的鲁棒性也提出更高的要求.EKF存在线性假设与高斯逼近的不足,而PF容易出现粒子退化问题,且计算量庞大.这使得传统滤波解算精度下降的同时,计算成本也在逐步升高.
2)量测异常问题.在KF/EKF框架下,较难确定各历元测量值之间的时间相关性,因此异常量测将严重影响系统的鲁棒性.以GNSS为例,当GNSS出现离群点时,将影响预测轨迹的光滑与稳定.
3)组合导航过程中各传感器传输速率的异步问题,难以满足即插即用,需要通过其他方法对齐数据,自适应性较差.导航定位领域涉及的部分信息融合方法如表1所示.
表1 惯性基组合导航信息融合算法Table 1 Information fusion algorithm for inertial-based integrated navigation
美国国防高级研究计划(defense advanced research program of america,DARPA)曾在2010年提出一种概念[1]: 全源定位与导航.该方法旨在全方位整合各种有用的导航信息,弥补单一导航方法的不足,这便需要自适应性强、精度高、鲁棒性好、即插即用的信息融合框架.近年来,基于因子图优化的方法引起了导航领域的关注,其在处理非线性问题和异步数据传输问题时展现出独特的优势.
因子图方法是一种用于处理多变量全局函数优化的概率图模型,用来表示因子和变量的关系.每个因子对应于全局函数的一个局部函数,而每个变量则对应于因子图中的节点.通过这种方式,全局函数被分解为一系列局部函数,每个局部函数对应于因子图中的一个因子.与滤波方法不同,因子图利用概率推理对变量进行数据融合和参数估计.这种方法特别适合处理异构非周期数据融合问题,并且能够以即插即用的方式组合传感器,实现较高的灵活性.因此,因子图方法在多源融合组合导航、机器人姿态估计、多种信号融合等领域中得到了广泛应用.文献[2]利用因子图方法实现了无人机的多传感器组合导航,同时利用边缘化处理减少了计算量.因子图在导航各个领域都有应用,例如:文献[3]验证了因子图方法即插即用的特性,当处于遮挡环境中GNSS信号失锁时,实现了剩余传感器之间的异步融合.文献[4]中,通过对地球自转角速度进行补偿,改进了IMU(inertial measurement units)预积分模型,进一步提升了因子图优化的精度.在协同导航领域,将因子图方法应用于无人机协同定位,提升了定位精度[5].
本文对因子图在导航定位领域的应用进行了概述,并分析了现存的一些问题.本文组织如下: 首先对因子图数学原理进行了简要分析,然后重点阐述了在定位、组合导航、故障检测领域中因子图方法的应用,最后进行了总结与讨论.
2 因子图理论
因子图的分解原理是将多变量全局函数分解为多个子函数相乘[6-7].该方法可直观反映各状态间的传递关系,因此在最优估计[8-10]、人工智能[11-12]、信号处理[13]等领域得到了广泛的应用.
2.1 概率模型
因子图是将概率分布分解为有因子节点和变量节点组成的图结构.因子节点表示因子函数;概率节点代表随机变量.因子图可以反映变量间的相互依赖关系,从而方便进行概率推断.
假设运动物体状态为x(假设此处为姿态),对应的概率密度函数为p(x),则有
如图1所示,假设x1,x2,x3,x4表示载体的4个状态,若以GNSS作为外部量测,则对应有量测信息z1,z2,z3,z4.各节点通过箭头进行连接.

图1 贝叶斯网络Fig.1 The Bayes net
概率推断依赖于条件概率密度,具体表达形式依赖于传感器配置与应用场景.最常用的概率密度函数为多元高斯分布概率密度函数,其表达形式为
其中:var表示贝叶斯网络的节点变量;µ表示随机变量均值;|Σ|表示变量的协方差矩阵所对应的行列式.
1)概率观测模型.
理想条件下,假设量测噪声为零均值高斯白噪声ω,量测函数为h(x),则量测模型可表示为
若令量测协方差矩阵为R,则概率模型可表示为
在复杂场景下,某些传感器噪声并不满足高斯分布.针对此类问题,通常采用鲁棒量测概率密度或对量测噪声进行白化处理[14].
2)概率运动模型.
对于SINS而言,导航原理基于航位推算,通常采用概率运动建模为
其中:xt,xt+1表示连续两个时刻的导航状态;g表示运动模型;ut表示陀螺仪、加速度计的控制输入;|Q|为过程噪声协方差矩阵的行列式.
2.2 因子图推断
常用的概率推断方法为最大后验概率估计(maximum A posteriori,MAP).根据数理统计知识,状态的最大后验估计可表示为
其中:p(X)表示状态的先验概率;p(Z)表示观测量的先验概率.由于观测量与状态量无关,因此式(6)可简化为
将图1简化为因子图模型,如图2所示.由图2可知,因子节点表示与状态相关的后验概率,连接节点的边则用来表示节点间的约束.式(7)可进一步表示为乘积形式,即
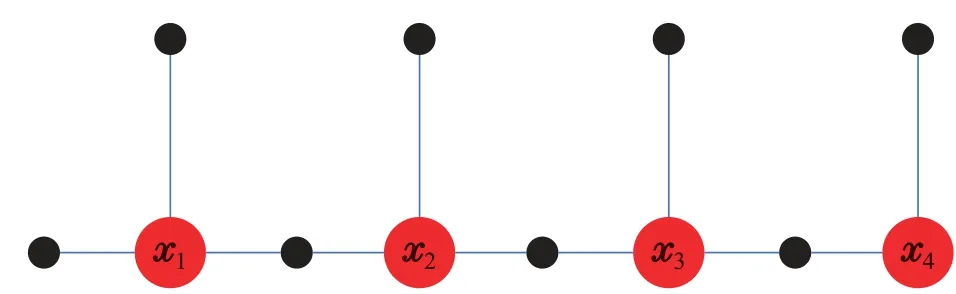
图2 因子图模型一般形式Fig.2 General form of factor graph model
若所有因子节点满足如下形式:
此时可将式(8)-(9)合并后取对数,转换为非线性最小二乘问题为
对应到导航领域,在对上式进行求解时通过组合量测变量以及先验信息对各传感器的信息进行融合,以此确定最大后验概率解.而hi(xi)往往是非线性的,这就需要利用非线性优化方法获取式(10)的一系列线性近似解,以此求得最小值,进而实现最优信息融合.
2.3 优化算法
对于线性量测方程,通常采用Cholesky,正交三角QR分解等方法直接进行求解;而对于非线性量测方程,可通过高斯牛顿法[15]、LM(Levenberg-Marquardt)算法[16]、Dogleg 最小化[17]等方法进行迭代求解[14].这里主要介绍正交三角QR分解和LM算法.
1)正交三角QR分解.
结合式(10),假设最优估计的修正值Δ可表示如下形式:
对于求极小值问题,利用偏导数为零,可得到以下关系:
对于高维复杂矩阵,正交三角QR分解可有效减小计算量[18].假设矩阵J满足正交三角QR分解,则有
结合式(13)可得
其中:R为上三角矩阵;d=QTb为已知量.
在因子图算法框架中,该过程即为变量消除[19].得到了上三角矩阵R后,通过回代法对各概率密度函数求最大值,即可获得各变量的修正量Δ.
以图3为例,根据图3得到的雅可比矩阵J与矩阵R,如式(15)所示:
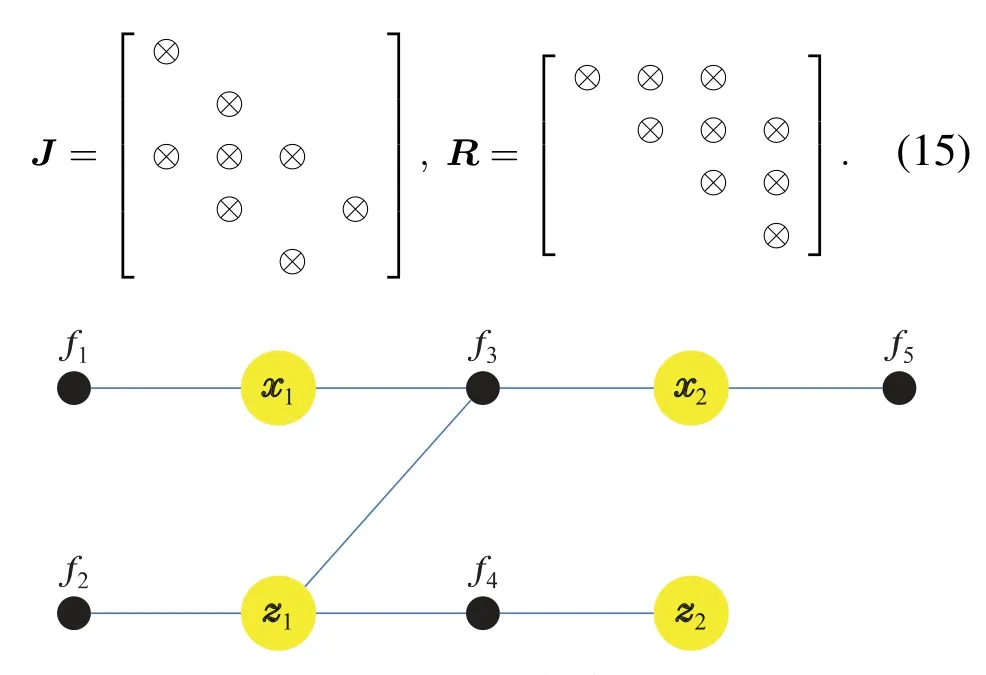
图3 因子图示例Fig.3 Example of factor graph
根据式(15)可得到图4所示分解关系,整体的结构可根据联合概率密度函数进行因式分解,即
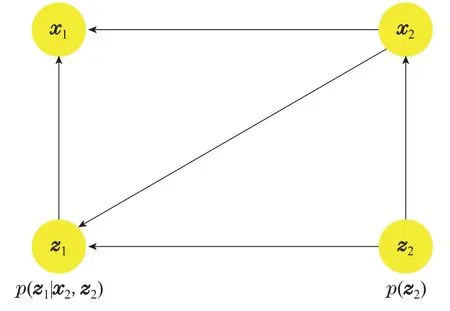
图4 因子图分解模型Fig.4 Model of factor graph decomposition
图中的箭头则代表了分解过程.根据上述模型,按照变量消除的相反顺序,在图4中反映为z2,x2,z1,x1通过联合概率得到最大值.
2)LM算法.
对于非线性最小二乘问题,为提高迭代效率,Levenberg探索了一种方法,通过在正规方程的对角线上增加一项非负值,表示为如下形式:
这里主要讨论λ>0的情况.当λ趋接近无穷大时,可将式(17)改写为如下形式:
通过调整单位矩阵的对角线元素,Marquardt对其作了进一步改进,使算法能更好地收敛,即
与高斯-牛顿法相比,LM 算法有更好的自适应性[20].当梯度值过小或过大时,该方法通过调整比例系数可对应产生较大或较小的迭代步长.LM算法通过设置比例系数,在一定程度上避免了系数矩阵的非奇异等问题,使求解的迭代步长更为准确稳定.
3 基于因子图的组合导航信息融合算法
因子图方法给不同传感器之间的异步融合提供了较好的解决方案,而且由于因子图方法具有很好的扩展性,可实现多传感器的灵活配置.
3.1 因子图组合导航框架
通过因子图进行组合导航,其基本思想是在一段时间内使系统的状态与导航信息互相关联,根据后验估计实现多传感器的信息融合.当获取外部所有的量测信息时,通过求取所有状态的联合概率密度函数即可获得最大后验估计.这里以无人船组合导航为例进行分析.
假设无人船的传感器配置为:INS(inertial navigation system)和GNSS,多普勒计速仪(Doppler velocity log,DVL)、磁强计(magnetometer,MAG)、超短基线定位系统(ultra-short baseline,USBL)等低频传感器.通过因子图方法对所有的可用信息进行融合,进而计算出最优导航解.以x表示状态向量,具体包括无人船的位置p、速度v和姿态;用c表示IMU的校正参数,具体表示惯性传感器的零偏值.假设在i时刻无人船的状态向量和校正参数分别为xi,si,定义k时刻前的所有状态向量和校正参数的集合为
若以Zk表示k时刻前所接收到的所有观测信息,则联合概率分布函数可表示为p(Λk|Zk).
已知联合概率分布函数可以通过因式分解,以此获得先验信息、量测模型等[21].令p(prior)表示可用的先验信息,则因式分解可表示为如下形式:
通过上述概率因式分解,可得到图5所示的因子图模型.式(21)中的每个独立部分在因子图中可表示为因子节点,因此可得到以下关系:

图5 无人船多源组合导航因子图框架Fig.5 Factor graph framework of multi-source integrated navigation for unmanned ship
根据式(8)-(10)可将式(23)转化为非线性最小二乘函数进行求解.
3.2 量测模型
1)一元量测因子.
式(23)可视为传感器的量测模型.当利用一元量测因子处理量测信息时,量测方程可表示为如下形式:
其中:hun(xk)表示量测函数;nun表示量测噪声;结合式(23)可将一元量测因子fun(xk)表示为
2)二元量测因子.
二元量测因子反映了两个状态之间的关联,状态的时间更新可通过求导表示为
式(27)通过二元量测因子连接相邻两个导航状态,即利用传感器的量测信息与当前时刻的状态估计来对下一时刻的状态进行预测.二元量测因子的雅可比矩阵可表示为如下形式:
3)多元量测因子.
与二元量测因子相比,多元量测因子与多个时刻的状态相关联,建模方法也与一元、二元量测方法类似.
利用不同类型的量测因子,即可建立不同应用场景中多传感器组合导航的因子图模型.
4 基于因子图的导航定位应用
定位问题是因子图的一个重要研究领域,早期多用于小型机器人(无人车)的同时定位与建图(simultaneous localization and mapping,SLAM)问题.近年来,因子图方法在GNSS定位、协同定位等领域也逐渐得到重视.
4.1 SLAM方法
SLAM的概念可以表述为机器人根据自身的运动模型和传感器获取的外部环境信息进行定位,同时对周围环境进行地图描述的过程[22-23].SLAM过程主要包括前端与后端两部分,前端负责对传感器采集的数据进行预处理,后端则主要是对前端的结果进行最优估计.因此,SLAM后端处理可利用滤波或因子图优化进行实现[24].
滤波多用于松耦合模式,主要有基于KF/EKF 和PF两类,KF/EKF计算简单,适用于小场景线性模型,不能满足大规模的非线性环境求解,收敛性较差;PF支持非线性、非高斯系统,但存在粒子退化现象,在高维状态空间采样时效率较低.因子图法在前、后端匹配优化的基础上增加了回环检测,以修正误差累积.适用于室内外的复杂环境,鲁棒性好,但计算量较大.目前,因子图优化在SLAM中应用更为广泛.滤波和因子图的对比如表2所示.
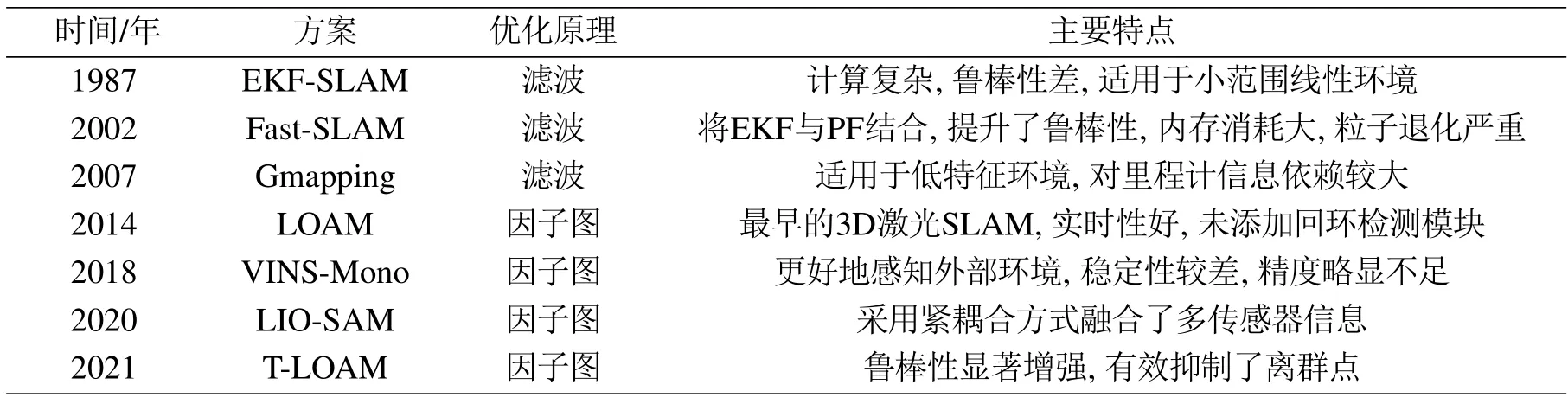
表2 滤波与因子图在SLAM中的对比Table 2 Comparison of filter and factor graph in SLAM
SLAM因子图模型如图6所示.在基于图优化的SLAM问题中,将载体的位姿表示为因子图节点,观测信息作为外部约束,表示连接节点的边.未知状态变量X包括xt(t=1,···,i)和lt(t=1,···,i),分别表示移动载体的位姿和路标.因子节点(黑色和灰色实心圆)分别代表里程计因子和路标观测因子,表示位姿与路标之间的相互概率关系.在获得较为准确的初始值后,利用高斯-牛顿迭代法或LM算法进行求解,进而获得全局最优值[25].
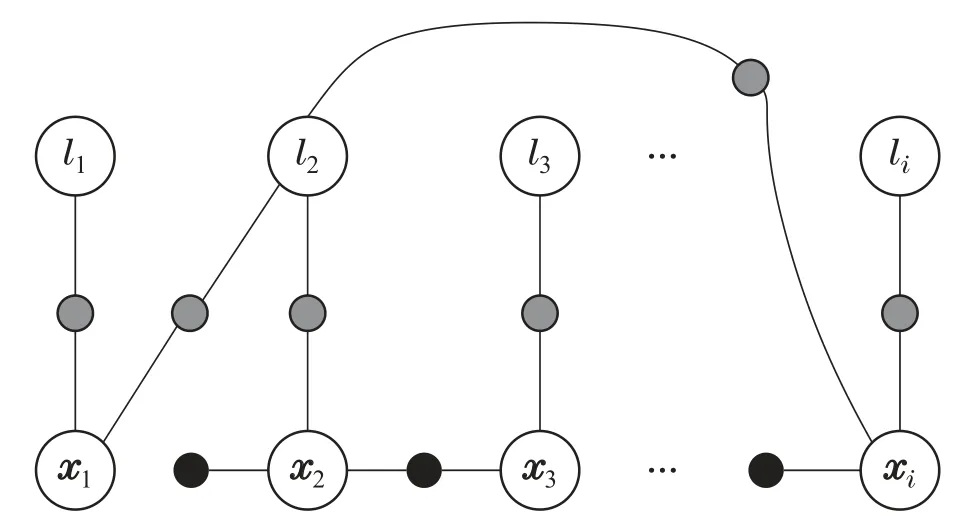
图6 基于SLAM的因子图模型Fig.6 SLAM based factor graph model
2010年,因子图方法首次应用于SLAM[26].为解决稀疏性问题,提升求解效率,可考虑多因子图组合法,对需要估计的变量进行有效分解[27].为解决因子图优化带来的庞大计算量的问题,目前已出现基于混合预积分的方法[28],该方法通过混合建模,删减了优化变量的数量,以此减小计算量.此外,也可利用滑动窗口解决数据的关联问题[29].在图优化框架中纳入已有的地图信息一起参与评估,能够有效提升计算效率.
利用因子图进行目标检测重点需解决高漂移与低鲁棒性问题,进而实现稳定建图.相关探索如下: 参考文献[30]设计了一种联合估计器,利用互相关变量对目标进行跟踪,同时实现传感器校准.参考文献[31]中提出了一种基于因子图优化的方法,在三维空间中进行目标跟踪的同时实现任务分配.在水下SLAM领域,通常利用DVL、声呐等多传感器辅助建图[32].参考文献[33]基于因子图框架,使用声呐作为主要传感设备进行水下SLAM实验,并利用滤波方法对声呐数据进行了预处理.对于无人机小交会角下的绝对定位问题,可利用影像匹配和视觉平差方法实现[34],在因子图框架下进行增量式信息优化融合.在激光-惯性里程计(liDAR-inertial odometer,LIO)方面,参考文献[35]对紧耦合的SLAM算法进行了研究,利用因子图优化了LIO的矢量漂移问题,避免回环检测失效.参考文献[36]提出一种紧耦合模式下的车辆动力学扩展LIO方法-LIO Vehicle,该方法利用轮速计和转向角传感器的测量值建立二自由度车辆动力学模型,在此框架下构造预积分因子.参考文献[37]优化融合了GNSS/重定位和轮式里程计,得到增强型LIO-LIO Fusion,可在复杂环境中提供鲁棒的6自由度运动估计.
4.2 GNSS定位
当前,因子图优化方法也已经逐渐深入GNSS领域.其主要应用包括: 1)GNSS异常量测值的检测与剔除;2)在GNSS观测短期不可靠时,对轨迹进行稳定估计.
由于非视距(non-line of sight,NLOS)与多路径效应的影响,伪距、载波相位会产生较多的异常量测[38],在复杂城市环境中表现得尤为明显.基于传统滤波的GNSS定位方法鲁棒性较差,对异常值较为敏感.这是因为在KF/EKF框架下无法同时对历史测量值之间的时间相关性进行确定.而因子图可结合多个GNSS历元,采用非线性估计方法,性能更为优异.
为了缓解GNSS接收机出现的异常量测问题,参考文献[39]提出一种渐进式非凸因子图优化(graduated non-convexity factor graph optimization,GNCFGO)的方法来提高GNSS定位性能,通过为GNSS测量值分配不同的权重来削弱离群点的影响.参考文献[40]提出了一种改进的GNSS 定位方法,在因子图框架下对GNSS接收机进行状态估计,基于低成本GNSS接收机分别实现了1.76 m和2.96 m的平均定位误差.相关实验平台如图7所示.此外,在车载环境还可引入零速更新(zero-velocity update,ZUPT)法[41],将ZUPT信息作为位置约束可对因子图进行辅助.
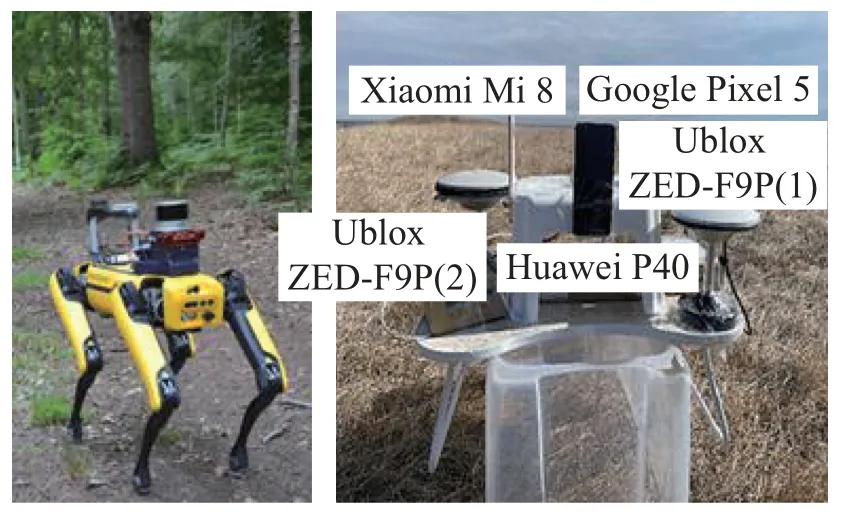
图7 基于因子图的GNSS定位部分实验平台[38]Fig.7 Partial experimental platform for GNSS positioning based on factor graph[38]
在隧道、桥梁等环境中,GNSS信息会出现短期退化,在基于KF的状态估计框架中,预测轨迹的平滑性与鲁棒性将受到严重影响[42-43].而因子图框架可表示载体的所有状态,并将载体状态与地标状态建立联系,利用地图进行优化,确保轨迹的光滑稳定.参考文献[44]提出了一种基于连续时间FGO的状态估计算法,重点针对短时间内GNSS观测不可靠的问题,以此对预测的轨迹进行平滑,与KF相比,FGO估计轨迹的精度和平滑度提高了30%.参考文献[45]提出一种因子图模型,可将原始GNSS数据与惯性数据紧耦合,还可以选择激光雷达作为外部观测因子,以此实现卫星信号稀疏的条件下移动机器人的流畅定位.针对城市峡谷环境中GNSS定位的问题,参考文献[46]研究了GNSS/INS在因子图框架下的松、紧耦合集成问题,利用EKF进行对比.实验表明: EKF的二维平均误差为9.14 m/250 s,而FGO仅为7.01 m/250 s,但FGO的计算时间有所延长.
4.3 协同定位
相对于单一定位模式,协同定位方法可以有效提高定位精度.由于因子图适应性较强,它在协同定位领域也有相当的应用潜力.
若j到k(k≥j+1)时刻没有接收观测信息,而从k时刻开始接收观测信息,由于难以获得j-k区间段的位置估计,从而导致算法难以估计速度误差与航向误差在较短时间内,可对速度误差和航向误差做以下假设:
则位置误差分量可表示为如下形式:
由于假设j-k区间段没有接收观测信息,此时通过先验估计进行位置更新.xk,yk表示k时刻位置信息,即
将式(29)代入式(31)可得
此时,k时刻的误差可表示为如下形式:
其中:
协同问题非线性度较高,其算法主要包括两类: 滤波估计与因子图优化.基于KF的协同定位方法的观测方程具有固定的状态维数,需要强行同步各类观测信息,不适用于解决观测信息不同步、不连续的协同定位问题.而因子图方法可将状态信息与观测信息转换为图中的节点,可实现即时增删灵活性较强.因此,图优化方法在解决复杂环境中的协同定位问题时更具优势.
将相邻节点之间的信息矩阵进行集成,以此评估节点间的测距性能,可有效解决协同定位中的通信复杂问题[48],并有效降低成本.对于水下协同问题,利用因子图法可将统计图映射到网络拓扑中.以此获得概率函数,协同定位精度与因子图节点个数成正比,但计算量也会显著提升.针对该问题可结合高斯参数来构建加权粒子来实现节点间的信息转移[49],通过合理分配粒子权重减轻计算负担.
除水下环境外,协同的重点研究领域还有遮挡环境下的连续定位以及无人机集群定位.参考文献[50]研究了基于因子图优化的分布式协同导航方法,利用因子图全局优化的特点解决了遮挡环境中观测信息无法同步、连续性较差等问题,同时可以实时补偿陀螺仪的零偏.参考文献[51]提出了一种基于带周期因子图(cycle factor graph,CFG)的协同定位算法,通过引入距离和方位角信息构建CFG.实验表明: CFG的二维RMSE=5.11 m/2000 s,而EKF 的二维RMSE=5.64 m/2000 s.参考文献[52]针对无人机集群的高精度协同定位问题,将因子图和KF进行结合.通过在每架无人机上建立分布式卡尔曼滤波器,融合惯性与GNSS信息修正定位误差.
4.4 多源组合导航
惯性基组合导航通过引入多种外部观测信息与惯性信息融合,进而抑制惯性导航系统误差,提升导航精度.由于因子图算法具有多次迭代和重线性化的特点,这是相对于传统KF算法的优势,其优良的灵活性与扩展性为多传感器信息融合提供了合适的框架[53].相关研究表明,对于INS/GNSS这一典型组合系统而言,使用因子图方法进行组合导航的性能最佳[46].此处主要介绍因子图在水下/水面组合导航,视觉(激光)/惯性组合导航以及复杂遮挡环境组合导航中的应用.
1)水下/水面组合导航.
对于多源的水下/水面组合导航问题,相较于传统的联邦滤波方法,因子图方法能够更好地解决各传感器采样频率异步的问题[54].文献[55]利用因子图构建了基于AUV的多源信息融合框架,对IMU,DVL,MAG,地形辅助等异频信息进行融合.通过仿真实现了水下高精度导航.文献[56]提出一种基于增量平滑因子图的船用导航系统信息融合及容错算法,将SINS,DVL,北斗系统(bei dou,BD)以及天文导航(celestial navigation system,CNS)的数据进行融合.半物理仿真实验体现了因子图即插即用的特性.
为进一步提高基于AUV的因子图组合导航的精度与平滑度,文献[57]利用等效IMU因子替代相邻量测值之间的几个连续的IMU因子,适用于高采样率的组合导航问题.根据和积算法可分别实现前向与后向的消息传递,通过对前、后向所传递消息的结果进行加权平滑,可求得最优导航解.文献[58]介绍了一种基于因子图优化的INS/USBL组合导航方案.在考虑了地球自转以及坐标系转换的前提下,提出了一种适用于高精度惯性传感器的改进的预积分模型,实验平台搭建如图8所示.水下实验结果表明,相较于传统KF方法,因子图优化方法可获得更高的组合导航精度.
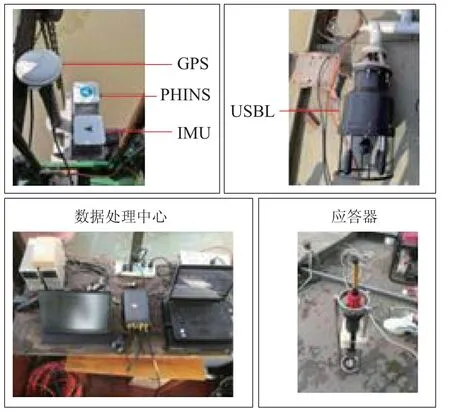
图8 基于因子图的水下组合导航实验平台[58]Fig.8 Experimental platform of underwater integrated navigation based on factor graph[58]
2)无人驾驶中的组合导航.
随着对惯性基组合导航以及SLAM领域的研究逐渐深入,因子图优化算法在无人驾驶的组合导航领域中也得到了长足的发展.
文献[59]提出了一种基于因子图优化的惯性/地磁/激光雷达组合导航方案.采用因子图算法,对惯性信息、运动约束信息、地磁匹配信息、激光雷达(Li-DAR)点云匹配信息进行异步融合,在点云匹配失效时可继续提供可用的先验信息.针对地下封闭空间的导航问题,由于此时卫星信号失锁,可在因子图框架下对Lidar、里程计(odometer,OD)以及IMU信息进行紧耦合[60],同时估计机器人的状态和传感器参数.此外,还可利用激光雷达与红外相机融合以进行目标识别,适用于弱光环境下的检测定位.
文献[61]提出了一种基于地图交通信标数据的基于因子图的SLAM方法.该方法采用局部滑动窗口实时处理数据,有效提升了定位精度.针对特征稀疏的室外导航问题,文献[62]通过引入一种偏振光相机(Polcam),利用偏振光获取绝对偏航角信息作为外部量测.稀疏场景下,根据IMU因子,激光雷达里程计(lidar odometer,LO)因子、Polcam因子以及运动约束因子搭建因子图,有效提高了姿态估计精度.文献[63]提出了基于非线性优化的卫星-视觉-惯性(GNSSvisual-inertial navigation system,GVINS)系统,该方法通过在因子图框架下对GNSS伪距、多普勒频移、视觉以及惯性信息进行紧耦合,用于状态的实时估计.该方法提高了系统的鲁棒性,较好地抑制了视觉-惯性里程计(visual-inertial odometer,VIO)的漂移.文献[64]将GNSS的精确点定位(precise point positioning,PPP)技术与VIO进行结合,设计了基于PPP/INS/Visual SLAM 的紧耦合系统:P3-VINS.该系统在因子图框架下将GNSS原始数据、视觉信息和惯性信息进行融合,在显著降低系统噪声的同时以提高状态估计的精度.针对复杂场景下UAV的精准定位的问题,文献[65]基于因子图框架和iSAM推理算法,建立了IMU/GNSS/VIO多源信息融合模型,通过选择合适的滑动窗口大小,实现了UAV的实时定位,与传统联邦滤波方法相比,FGO算法的导航精度提高了1.5-2倍.
3)复杂遮挡环境组合导航.
智能生活的到来使得人们对复杂遮挡环境(如室内)的导航需求日益增加,复杂遮挡环境的导航定位技术已成为热门研究领域[66].针对传统滤波方法扩展性差,以及变结构多模型方法成本高昂、计算复杂等问题,研究人员已开始将因子图方法应用于复杂遮挡环境下的导航问题.
针对室内复杂场景中进行导航时无法接收确定的超宽带(ultra-wideband,UWB)测距信息的问题,文献[67]提出一种基于因子图的INS/UWB室内行人紧组合定位算法,并通过坐标变换的方法对传统因子图进行改进.仿真试验表明该方法优于变结构多模型EKF,位置精度提高约14.94%.针对卫星拒止环境中智能车的可靠定位需求,文献[68]提出了一种基于因子图的低成本导航方法.在构建基于因子图的UWB/INS动态信息融合框架的基础上,制定自适应融合规则对不同情况下UWB/INS的信息进行融合,输出导航最优解.该方法在抑制了非视距误差的同时,可靠性与自适应性也得到显著提高.
对于室内行人定位,文献[69]设计了一个基于深度神经网络(depth neural network,DNN)的Wi-Fi/行人航位推算(pedestrian dead reckoning,PDR)室内定位系统,用于智能手机的室内定位.此外,文中还提出了一个带有自适应鲁棒性调整的因子图模型来融合Wi-Fi 和PDR 的定位结果,它分别克服了Wi-Fi 和PDR 的采样率低、误差随时间累积等不足,使系统具有更好地鲁棒性和准确性.表3给出了部分文献中滤波方法与因子图方法的精度对比.
根据表3中的文献可知,在无外部干扰的情况下,因子图算法的导航解算精度与联邦滤波精度相当;但因子图方法可灵活组合异步量测信息,实现即插即用,尤其当处于大规模复杂环境或存在外部干扰时因子图方法优势更明显.
要比较因子图和其他改进滤波的精度,需要具体问题具体分析.不同的滤波算法和优化技术适用于不同类型的数据和问题,其精度取决于问题的特性、数据的特性以及算法的适用性.一些改进的滤波算法可能使用更复杂的模型或更多的数据信息,与因子图方法相比,这些算法可能拥有更高的精度.
5 基于因子图的组合导航故障检测
在组合导航过程中,由于外界的电磁干扰或震荡的环境,传感器容易出现异常量测甚至故障的情况.某些复杂环境下,导航设备会出现误差突然增加,甚至解算故障的情况[70].因此,导航过程中故障的检测与隔离是十分必要的.
基于组合导航的框架模型,因子图方法在故障检测领域也能够发挥其独特优势.当前的故障检测应用主要基于INS/GNSS组合导航系统,利用惯性原始数据与GNSS伪距信息进行故障检测[71].结合故障检测结果,对故障因子节点进行自适应隔离或分配较小的权重因子,减少故障量测对导航最优解的影响,以此提升导航系统的精度与鲁棒性.在INS/GNSS组合导航系统下,可利用因子图即插即用的优点,对卫星伪距故障或惯性导航系统故障进行检测甄别,在因子图框架下具有更好的隔离效率,在故障情况下保持较高精度的导航,提升了系统的可靠性.
6 总结与讨论
因子图通过概率的方法来表示函数的分解,由于其特有的数学性质,对于某些问题的建模与状态估计可展现出独特的优越性.本文首先分析了因子图的概率推断方法,重点介绍了因子图方法在定位以及组合导航领域的应用,并对因子图在故障检测领域中的发展作了简要阐述,可得出以下几点结论:
1)因子图方法适用于强非线性环境中的后端优化,可解决多传感器信息融合中的异步、多速率等问题,相对于基本滤波框架(KF/EKF)具有较好的鲁棒性与容错性;
2)因子图虽能较好解决非线性优化问题,但仍然具有一些缺点.因子图算法复杂度高,尤其当问题规模较大时,其计算复杂度与节点数呈正相关,且需要大量预处理工作以便将问题转换为因子图形式,需要额外分配计算时间与空间,同时为了避免引入过多的噪声与偏差,需要仔细地选择变量与模型.此外,在使用因子图进行优化时可能陷入局部最优;
3)对于因子图在导航定位领域的发展趋势,一方面可利用因子图与滤波方法互补,设计两者相结合的导航前后端滤波器.此外,当前针对导航领域因子图的研究多集中于理论方面,考虑到工程实践应用,应加大基于因子图的导航硬件平台开发.未来计算机信息处理技术,如并行计算的发展或许能使得因子图方法在实时导航定位应用中有更好的应用前景.
