基于随机空间网络的无人机集群协同对抗模型
2023-02-09王尔申郭靖宏晨任虹帆陈艾东商新娜
王尔申,郭靖,宏晨,任虹帆,陈艾东,商新娜
(1. 沈阳航空航天大学 电子信息工程学院,沈阳 110136; 2. 沈阳航空航天大学 辽宁通用航空研究院,沈阳 110136;3. 北京联合大学 北京市信息服务工程重点实验室,北京 100101; 4. 北京联合大学 机器人学院,北京 100101)
目前,无人机在战场中发挥越来越重要的作用。无人机正在重新定义战争。无人机集群以难防御、强进攻、低成本、协同对抗、使用灵活等优势越来越受到重视[1]。Grassé[2]通过研究虫群的群体行为,最早提出了“集群”的概念。无人机集群可以模仿生物集群行为,通过无人机间的信息传递与协同,能在各种复杂险恶的环境下完成多样性任务。无人机集群技术将成为一项足以改变战争模式和战争规则的颠覆性技术。
无人机集群技术已成为主要军事强国角逐的热点。在无人机集群协同方面,文献[3]将博弈论应用于多智能体协同合作问题,设计了一个分布式优化算法。文献[4]针对未知空域中的无人机路径规划问题研究了基于遗传算法的操作条件概率自动机(genetic algorithm-operant conditioning probabilistic automaton, GA-OCPA)学习系统。文献[5]通过对无人机历史搜索信息、节点重要性和运动学约束等条件的综合分析完成无人机运动规划。文献[6]研究了一种无人机在线协同航迹规划方法,可以快速生成符合协同时序要求的协同航迹。文献[7]研究了基于耦合度的启发式优先规划方法(couplingdegree-based heuristic prioritized planning, CDH-PP),提高了无人机集群协同路径生成的效率和鲁棒性。文献[8]针对已知地形下的无人机集群避撞问题,研究了一种多目标最优路径分配算法。文献[9]研究了一种基于Lyapunov 稳定性理论的无人机规避或跟踪目标运动导引方法。文献[10]针对无人机集群侦察任务研究基于离散粒子群优化(discrete particle swarm optimization, DPSO)的路径规划算法。文献[11]针对无人机集群网络协同通信的节点布局问题,研究了多跳优先队列方法,引入强化学习得到了基于深度Q 学习(deep Q-learing,DQN)的无人机网络链路优化模型。文献[12]针对无人机集群网络的协同通信问题,研究了自适应多集群leaderfollower 的协同优化模型。
在无人机集群对抗方面,文献[13]提出了基于博弈论的面向多无人机追逃的最优机动决策算法。文献[14]采用两步裁定法模拟无人机双方对战,并利用文化基因算法模拟目标匹配,实现了超视距无人机目标对抗。文献[15]在单无人机有限控制算法的基础上,提出了一种多无人机自主控制算法,以提高无人机集群在对抗中的成功率。文献[16]利用蜂群算法提出了一套完整的无人机集群协同对抗软件体系架构。文献[17]针对不同机动能力的无人机群体的攻防对抗,提出了基于强化学习的多无人机强化学习方法,无人机可通过自主学习提升协同对抗决策效能。
无人机集群协同对抗是一个高维度、强动态的非线性复杂系统。复杂网络是研究复杂系统的有力工具。复杂空间网络指节点位于具有度量的空间中,是受一定几何形状限制的嵌入到空间中的网络[18]。空间网络中的节点具有空间位置属性,边具有空间距离属性。随机空间网络是指网络中节点被随机生成在一个空间坐标位置,节点间的空间距离也是随机生成的[19]。
现有的无人机集群模型大多基于群体内部协同[5-7],大规模无人机集群协同对抗的模型相对较少。使用随机空间网络模拟无人机集群对抗场景,可以充分利用现有的复杂网络理论,具有算法简单、空间布局灵活、战场初始态势随机、更接近于多无人机混战场景等优点。本文将随机空间网络引入到无人机集群协同对抗场景中,将对抗的无人机集群区分为红蓝双方,每架无人机为网络中的一个节点,无人机间的协同对抗关系抽象为网络中的边,边的长度代表无人机间的空间距离,构建无人机集群协同对抗 网 络(cooperative confrontation networks of UAVs,CCN-UAVs),基于网络级联效应分析无人机集群协同网络的鲁棒性,并通过仿真验证无人机集群协同对抗模型的有效性。
1 作战场景与网络模型
1.1 作战场景
蓝方无人机为察打一体型无人机,任务为协同侦察,主要探测敌方防御情况与侦察敌方地面部队,需要将侦察得到的大量信息带回基地。红方无人机为打击型无人机,任务为巡视是否有敌方潜入,并在发现敌军后进行攻击。红蓝无人机集群对抗场景如图1 所示。
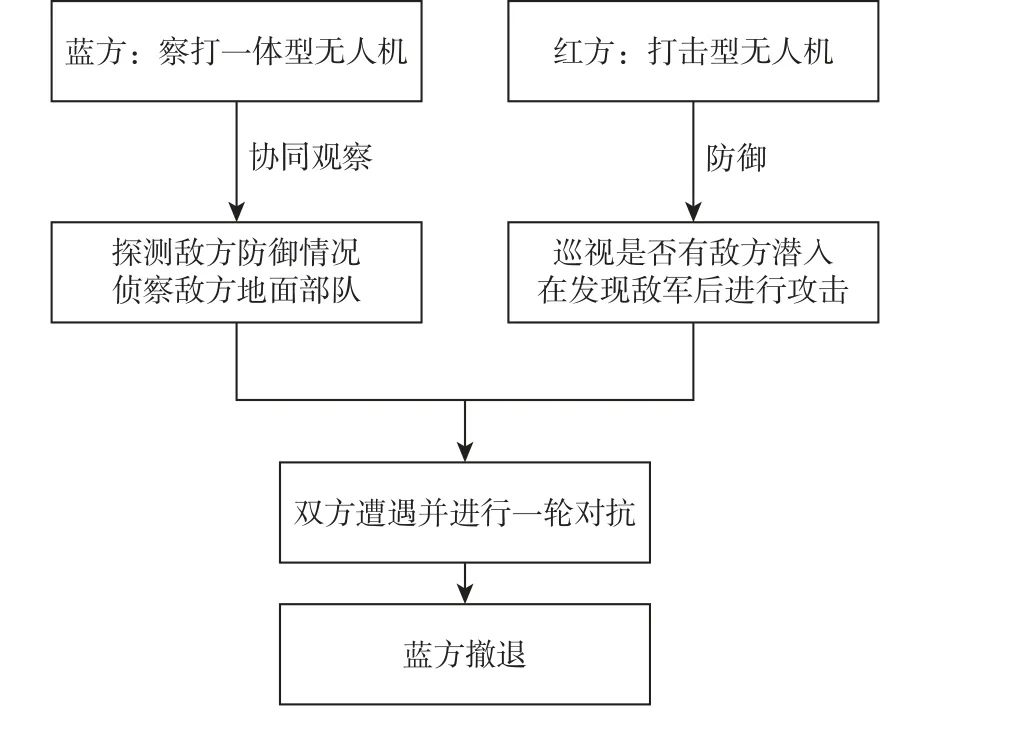
图1 对抗场景示意图Fig. 1 Diagram of confrontation scenario
随机空间网络具有2 个重要参数:空间维度和空间中节点的距离阈值。初始时,n个节点被随机生成在一个可设定维度的空间中,同时可根据需要设定节点的位置与分布方式。如果d(u,v)≤R,则节点u与 节点v之间将存在连边。其中,d为2 个节点之间的欧氏距离,R为节点间的距离阈值。
在二维空间与三维空间中,分别采用全连接方式构建红蓝双方的无人机集群协同对抗网络。网络中的每个节点视为无人机,一定空间距离内的无人机间存在连边表示其协同或对抗关系,互为友机间的连边为协同关系,互为敌机间的连边为对抗关系;设定网络总节点数为n,在空间中节点位置分布服从X~N(0,4)高斯分布,各节点属性随机分配,红蓝双方节点数均为n/2,得到红蓝双方无人机集群协同对抗网络CCN-UAVs;将蓝方节点组成的网络单独提取出来并保存,此网络为蓝方无人机集群协同网络(cooperative network of UAVs, CN-UAVs);将红蓝双方无人机集群协同对抗网络中所有互为友机间的连边(即相同颜色节点之间的连边)删除,构成红蓝双方无人机集群对抗网络。以10 个节点为例展示了构建红蓝双方无人机集群网络的过程,如图2 所示,蓝方节点用蓝色实心点表示,红方节点用红色空心点表示。
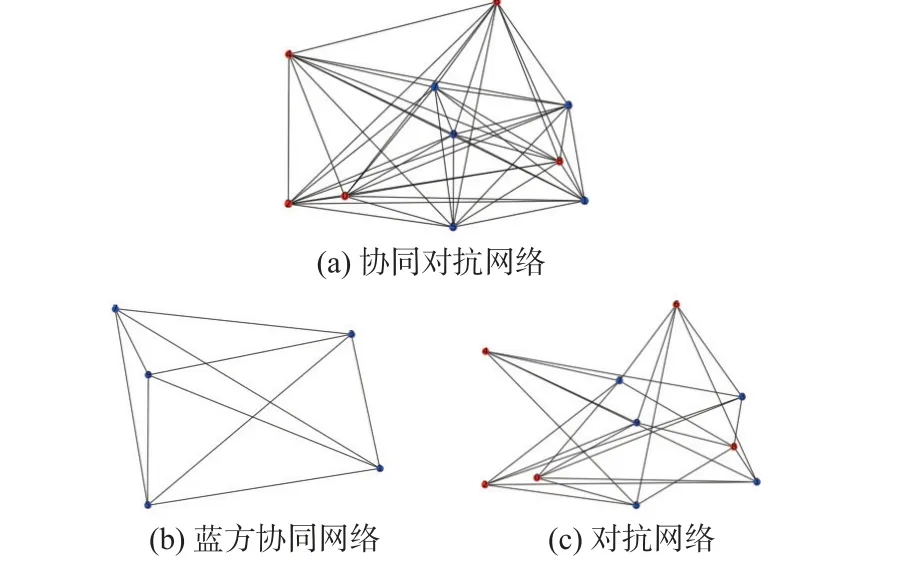
图2 网络结构Fig. 2 Network structure
考虑双方的杀伤率受空间距离的影响,2 个对抗无人机的空间距离越大,杀伤率就越低。引入衰减因子 γ,其表达式为
1.2 协同对抗网络模型
1.3 杀伤率的衰减
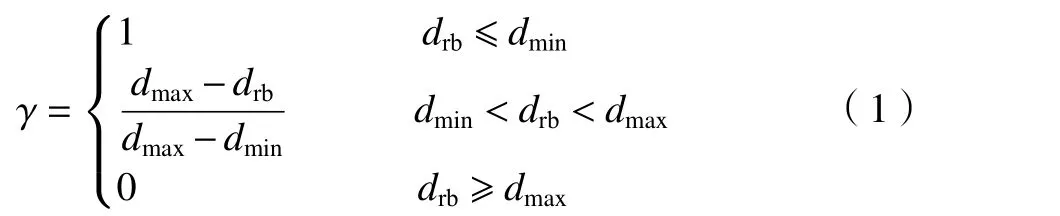
式中:dmax为网络中对抗节点的空间距离阈值,超过该距离将不再对攻;drb为2 个对抗无人机的实际空间距离;dmin为无杀伤率衰减的最小空间距离。
双方对抗过程中的真实杀伤率rreal为

式中:r为无衰减的初始杀伤率。
可 以 看 出,drb=dmin时 , γ=1,即 不 衰 减。当drb=dmax时 , γ=0,2 个无人机将无法杀伤对方。
1.4 网络鲁棒性评价指标
鲁棒性[20-21]是复杂网络的一项重要特征,指网络在受到外界攻击或内部结构由于某种原因发生变化时,还可以保持其功能的能力。如果网络中的部分节点(边)被移除后,该网络中的大部分节点(边)仍然可以保持正常功能,则称这个网络是鲁棒的。复杂网络的级联效应是指网络中一个或者少数几个节点或边的失效会通过节点之间的耦合关系引发其他节点也发生失效,进而产生连锁反应,导致网络中相当一部分节点甚至整个网络的崩溃[22]。
为了分析蓝方CN-UAVs 的鲁棒性,引入无人机数据携带量与数据容量上限参数,通过被击落无人机在坠毁前的数据分配过程来触发网络的级联效应。使用网络失效大小作为评价蓝方CN-UAVs鲁棒性的指标,其中网络失效大小S定义为

式中:N′为 蓝方CN-UAVs 中当前剩余节点数;N为初始蓝方CN-UAVs 总节点数。
仿真开始时,设置双方无人机各自的能力参数并分配任务杀伤率;对抗过程中,设置每架无人机选择单个敌机进行对抗,对抗结束后,蓝方无人机撤离,记录被击落的无人机;在对抗结束后,观察蓝方无人机集群对探测数据的分配及因被分配超出可容量(可容量指数据容限减自身数据携带量)的数据而触发的级联效应。计算蓝方CN-UAVs 失效大小S。总体步骤如下:
步骤1 基于随机空间网络构建红蓝双方的CN-UAVs。
步骤2 双方进行对抗,被击落的蓝方无人机在坠毁前分配探测数据。
步骤3 在蓝方CN-UAVs 中寻找是否有被分配数据量超出其可容量的无人机,若存在,则该部分无人机将因为满载而在网络中被视为失效,并将其被分配的超出可容量的数据平均分配给其他相邻友机。
步骤4 重复步骤3,直至蓝方CN-UAVs 中不存在被分配超出可容量数据的无人机或全部无人机失效,计算蓝方CN-UAVs 失效大小,整个过程结束。
2 仿真结果
在仿真实验中,设定整体空间足够大,总节点数设置为100,其中50 个节点为红方无人机,另外50 个节点为蓝方无人机;蓝方每架无人机初始执行协同侦察任务探测到的数据量为5;时间步从第10 步开始,第11 步为双方无人机对抗过程,第12步及之后为因数据容限所触发的级联效应过程。
2.1 二维空间下仿真结果
在二维空间中,不考虑杀伤率衰减,真实杀伤率为设定值,以蓝方CN-UAVs 为主体,绘制红方无人机具备不同杀伤率的情况下,时间步t和蓝方网络失效大小S的关系,如图3 所示。设置蓝方无人机数据容量上限为7,红方无人机杀伤率分别为0.2、0.4、0.6、0.8。图中结果为200 次独立实验取得的平均值,误差棒表示标准差。
由图3 可以明显看出,红方无人机的杀伤率越高,蓝方在第11 时间步时被击落的无人机数量越多,且后续触发的级联效应越强,即成功带回基地的数据越少。因此,针对红方CN-UAVs 来说,若要尽可能多得拦截敌方无人机,阻止敌方将数据带回,则应尽力提高攻击的杀伤率。
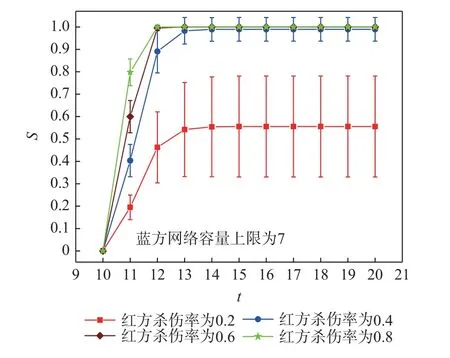
图3 二维空间中不同红方杀伤率下网络失效大小与时间步的关系Fig. 3 Relationship between failed size and time step underdifferent hit rates of red UAVs in 2D
无人机具备的数据容量上限是触发级联效应的根源,蓝方无人机为确保将更多数据带回基地,其在坠毁前会将自身携带的全部数据平均分配给相邻友机,正因为此过程,一部分无人机可能会被分配到超出其可容量的数据,这部分无人机将因满载而在网络中被视为失效。为了探寻无人机数量容限对此过程的影响,绘制了蓝方网络失效大小S和 时间步t的关系,如图4 所示。设置红方无人机杀伤率为0.5,蓝方无人机数据容量上限分别为6、8、10、12、16。仿真结果为200 次独立实验取得的平均值,误差棒表示标准差。
当容量上限达到一定值时(图4 中容量上限为16,为容量上限临界值,即容量上限16 的网络失效大小S基本不变),对抗后的级联效应基本不会再使蓝方CN-UAVs 失效大小S发生改变。因此,针对蓝方CN-UAVs 来说,应尽力提高数据容量上限直至达到临界值,这样既可以将更多的数据安全带回基地,也可节约成本。
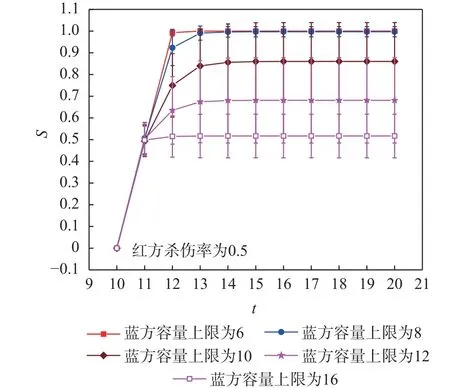
图4 二维空间中不同蓝方容量上限下网络失效大小与时间步的关系Fig. 4 Relationship between failed size and time step under different capacity-limitation of blue UAVs in 2D
2.2 三维空间下仿真结果
在三维空间中考虑杀伤率衰减,设定空间距离阈值dmax=3, 无杀伤率衰减的空间距离dmin=0.5。以蓝方CN-UAVs 为主体,同样从红方杀伤率改变和蓝方容量上限改变2 个方面进行研究。首先,考虑红方杀伤率改变的情况,通过比较二维和三维场景下的级联效应(见表1 和图5),2 种情况下蓝方无人机容量上限相同,所得数据为25 次独立实验的平均值。可以发现,红方杀伤率相同的情况下,三维场景在对抗过程中被击落的无人机架数明显减少,并且后续触发的级联效应也相应减弱。
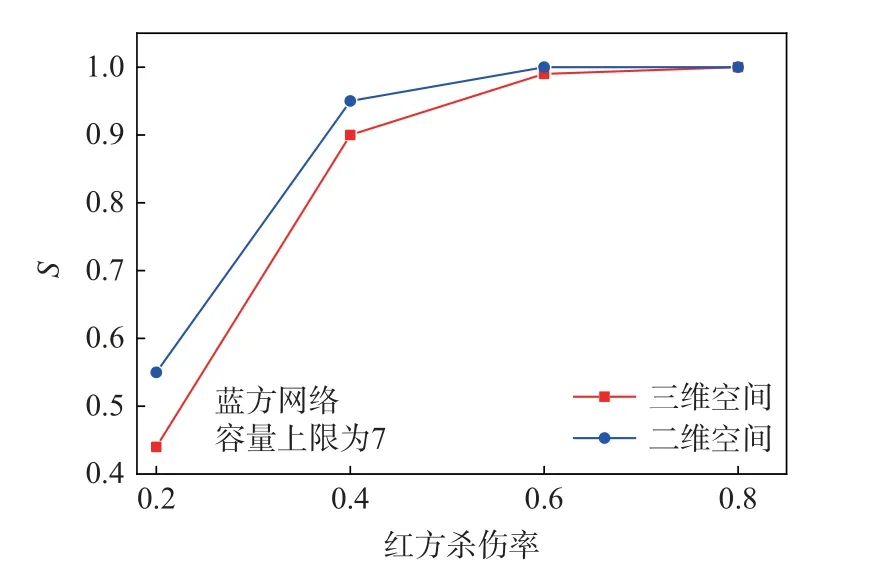
图5 二维与三维空间中不同红方杀伤率下网络失效大小对比Fig. 5 Comparison of failed size under different hit rates of red UAVs in 2D and 3D
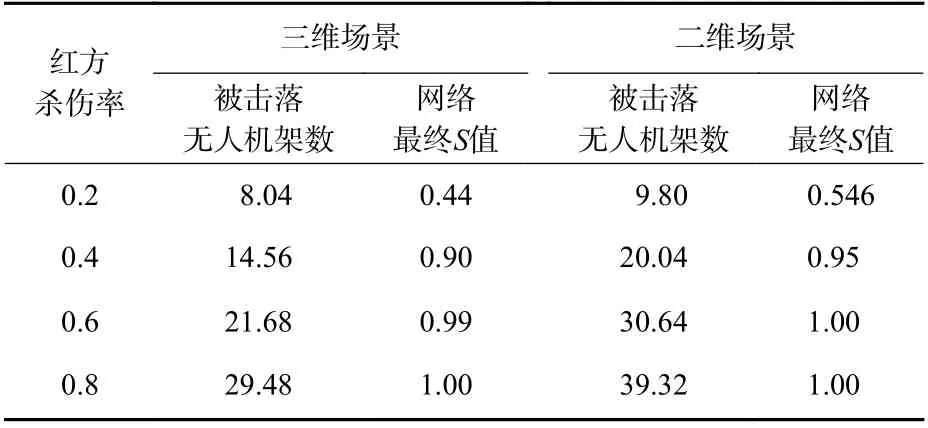
表1 不同红方杀伤率下的级联效果Table 1 Cascading effects under different hit rates of red UAVs
图6 绘制了红方无人机具备不同杀伤率的情况下,时间步t和蓝方网络失效大小S的关系。设置蓝方无人机数据容量上限为7,红方无人机杀伤率分别为0.2、0.4、0.6、0.8,图中结果为100 次独立实验的平均值,误差棒表示标准差。通过与图3 对比,结果显示,二维场景与三维场景的级联效应变化规律基本一致,即红方杀伤率越高,蓝方在对抗过程中被击落无人机数量越多,且后续触发的级联效应更强。但无论杀伤率为多少,蓝方被击落无人机架数都比同等条件下二维空间中少,且触发的级联效应相应减弱。
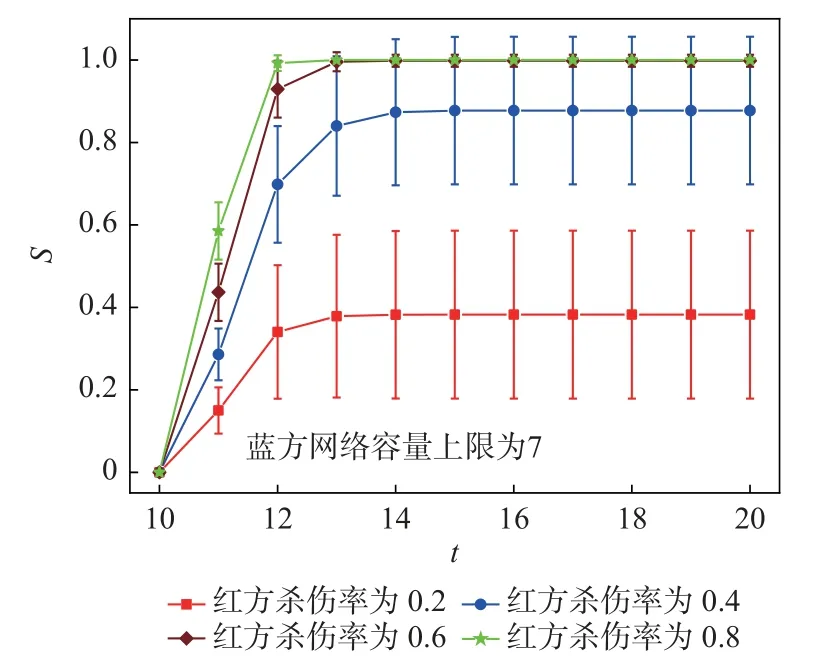
图6 三维空间中不同红方杀伤率下网络失效大小与时间步的关系Fig. 6 Relationship between failed size and time step under different hit rates of red UAVs in 3D
考虑蓝方容量上限改变的情况,图7 绘制了蓝方无人机在具备不同容量上限的情况下,时间步t和蓝方网络失效大小S的关系。设置红方无人机杀伤率为0.5,蓝方无人机数据容量上限分别为6、8、10、12。实验结果为200 次独立实验的平均值,误差棒表示标准差。图7 中,蓝方无人机数据容量上限越大,所触发的级联效应越弱,数据容量上限临界值得到了降低,并且容量上限为12 时级联效应趋于稳定。
同样对二维场景和三维场景的结果进行比较(见表2 和图8),2 种情况下红方无人机杀伤率相同,所得数据为25 次独立实验取得的平均值。结果显示,蓝方容量上限相同时,三维场景比二维场景在被击落无人机数量、级联效应及容量上限临界值等数值上均有所降低。例如,二维场景下容量上限临界值为16(见图4),三维场景下容量上限临界值为12(见图7)。
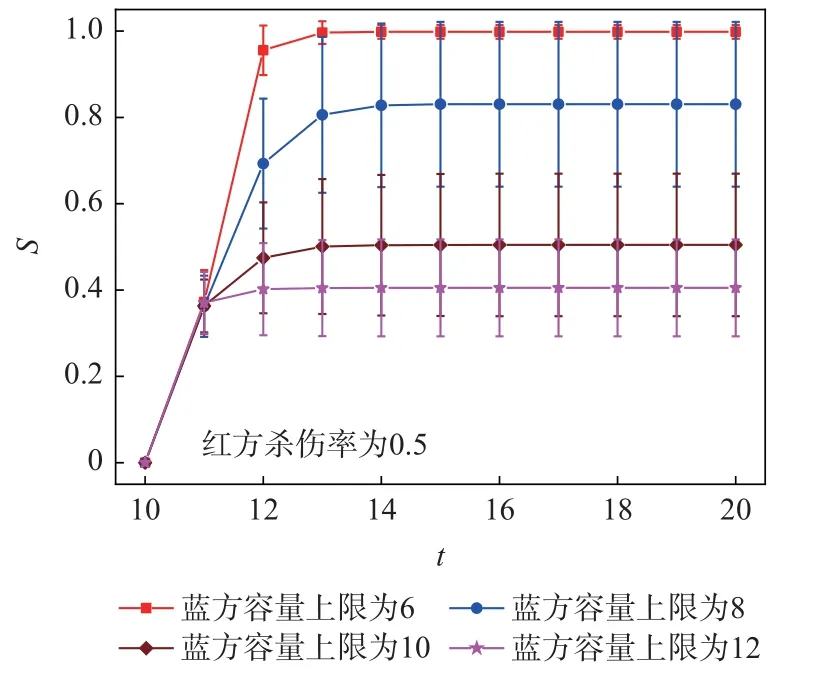
图7 三维空间中不同蓝方容量上限下网络失效大小与时间步的关系Fig. 7 Relationship between failed size and time step under different capacity-limitation of blue UAVs in 3D
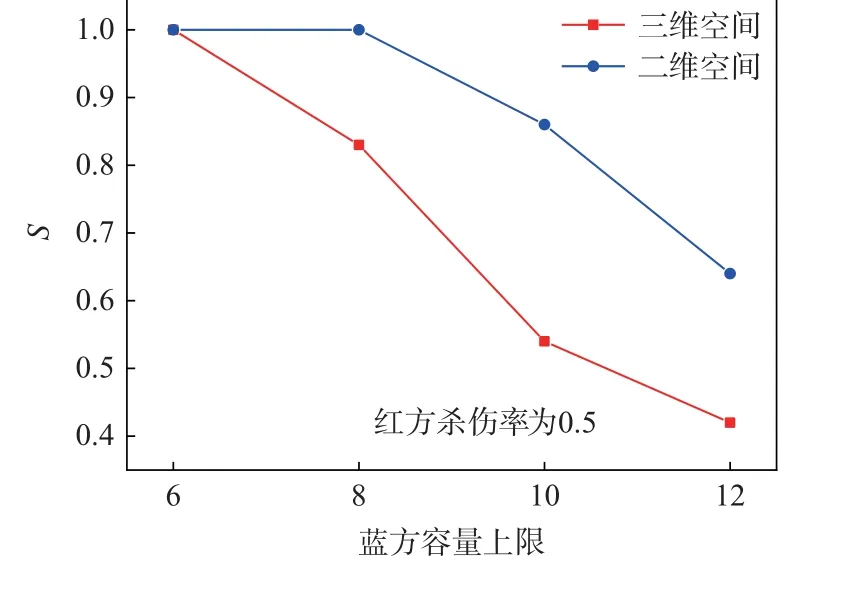
图8 二维与三维空间中不同蓝方容量上限下网络失效大小对比Fig. 8 Comparison of failed size under different capacitylimitation of blue UAVs in 2D and 3D
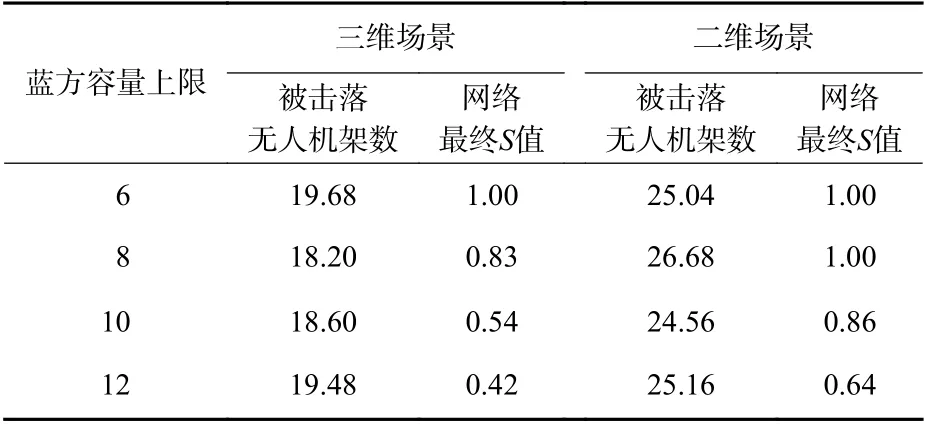
表2 不同蓝方容量上限下的级联效果Table 2 Cascading effects under different capacity-limitation of blue UAVs
3 结 论
本文基于复杂网络理论,构建了红蓝对抗场景及无人机集群协同对抗网络模型,研究在二维、三维场景下的网络鲁棒性及级联效应的影响。二维与三维对抗场景的研究结果表明:
1) 蓝方容量上限值越大,级联效应越弱,网络鲁棒性越强。
2) 初始杀伤率相同时,三维场景中杀伤率的衰减使得蓝方网络产生的级联效应更弱,网络鲁棒性更强。
