无缆自定位应急航标系统仿真设计
2023-02-07王永涛刘兴龙张海波初秀民王志远
王永涛,刘兴龙,张海波,初秀民,王志远
(1.交通运输部东海航海保障中心 连云港航标处,江苏 连云港 222042;2.闽江学院 物理与电子信息工程学院,福建 福州 350108;3.闽江学院 福建省船舶智能航行安全控制工程研究中心,福建 福州 350108;4.闽江学院 海洋智能船舶福建省高校工程研究中心,福建 福州 350108)
0 引言
航标是指示航道可通航区域的交通基础设施,对保障船舶通航安全至关重要。当出现水上交通事故、水下施工等情况时,需要及时部署应急航标指引船舶航行。传统应急航标采用航标船抛设系缆的方式部署,部署成本高、工时长,且系缆浮标漂移半径大于压缩航道可航水域[1]。基于甚高频(VHF)无线通信技术的船舶自动识别系统(AIS),将船舶助导航带入无线电时代[2]。AIS虚拟航标通过广播虚拟的航标位置,使得船载电子海图终端可以解析和显示虚拟航标,具有布设简单、快捷的优点[3]。但是由于缺乏物理可视标志,AIS虚拟航标航路指引不直观且无法为未安装AIS设备的船舶提供助航服务[4]。随着水面无人船技术的发展,小型船舶自主航行和自主定位功能已经具备应用条件[5-6]。引入无人船自主控制技术,设计一款无缆自定位航标,实现紧急条件和狭窄水域的航标快速部署,具有技术可行性。
自主控制系统设计是无人船自主航行的关键技术,决定了无人船能否精确按照规划航线航行和停泊[7]。嵌入式系统具有部署灵活、可靠性高的优点,在移动机器人自主控制系统设计中应用广泛[8-9]。文献[10]系统以STM32为主控核心,提出一种基于响应式禁忌搜索的PID参数自适应整定航迹控制算法,实现无人船的路径跟随功能。文献[11]考虑船舵和推进系统的物理阈值,利用PID控制器和遗传算法对不同的操作点进行优化,提出了无人船航向自适应控制算法。文献[12]基于分数阶微积分理论设计无人船航向控制的分数阶控制器,提出一种融合卡尔曼滤波器的自适应神经网络航向分数阶控制方法。文献[5]基于模型预测控制(Model Prediction Control,MPC)理念设计了无人船路径跟踪控制系统架构,在室外水池环境下完成了MPC与PID路径跟踪控制对比实验。可见,嵌入式系统是无人船控制的常用技术方法,无人船控制技术方案和算法研究成果丰富。但是,这些研究的对象都是标准的船舶模型,船舶与助航浮标的物理结构存在较大差异。因此,有必要在借鉴无人船控制技术的基础上深化应急航标的动静力学研究,提出适合于无缆自定位应急浮标的控制方案。
本文面向应急助航服务设计了一套无缆自定位应急航标系统,从系统需求、主体结构、执行系统、控制系统、控制策略设计等方面展开,并通过计算机仿真验证方案的可行性和适用性。
1 设计需求
1.1 部署快捷性
应急航标部署面向的通常是突发紧急事件,要求航标部署时效性好、工时消耗少。采用无缆自定位设计,取消传统浮标布设和回收过程中最难、最耗时的抛锚、起锚环节,有助于提升航标部署速度。
1.2 航标特征一致性
应急航标作为助航标志的一种,外形上应当与传统浮标特征一致,避免船舶驾驶员在看见应急航标时产生语义上的理解差错。
1.3 技术可靠性
航标作为水路交通标识,必须具有技术高可靠性。应急航标设计应当避免系统过于复杂和引入不成熟的技术。采用技术可靠性更高的嵌入式系统作为运行执行系统,有助于避免技术风险。
2 系统设计
系统设计分为应急航标主体结构方案设计、运动执行系统设计、控制系统设计以及控制策略和仿真实验验证等部分。
2.1 航标主体设计
参考助航标志设计规范,无缆自定位航标主体为圆柱形结构,主体直径为1 200 mm,型深为500 mm。主要包括:平台船体结构、自主定位控制子系统、自主定位执行子系统、类圆柱体主船体外壳、吊舱支撑座、密封舱盖、北斗/GPS多模终端、罗经、控制板、电源管理设备、太阳能电池板、电机驱动器、4G/5G路由器、锂电池组、主推进器吊舱、主推进电机、主螺旋桨、主推进器导管、回转推进器吊舱、回转推进器电机、回转螺旋桨、舵叶、舵机,主体结构图如图1所示。
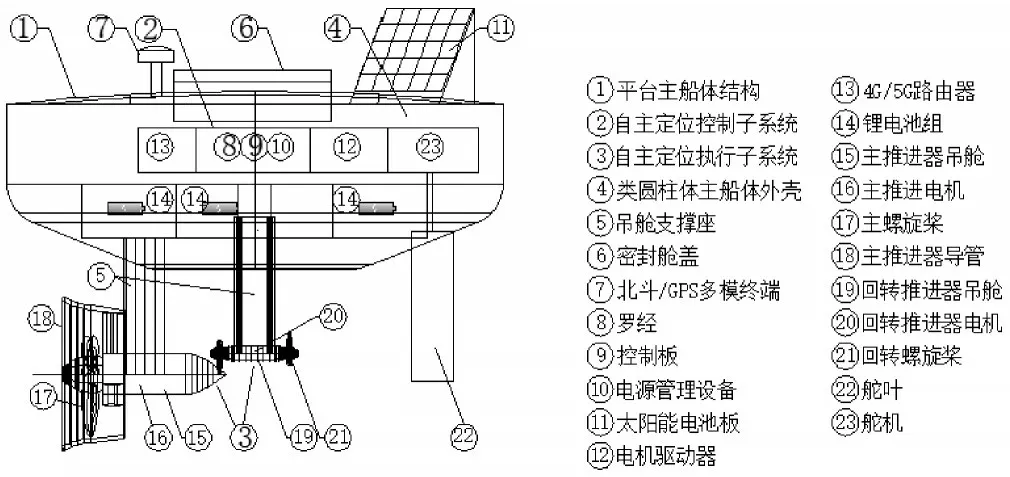
图1 无缆自定位航标主体结构设计
航标中的核心部件及其功能:北斗/GPS多模终端实现航标的定位功能;罗经实现航标方向的感知;控制板实现整个系统的逻辑控制;主推进电机、主螺旋桨、回转推进器电机、回转螺旋桨、舵叶、舵机共同实现航标的推进功能。
2.2 运动执行系统
为实现自主定位运动执行功能,设计的运动执行系统主要包括:主推进器、回转推进器、舵系统,结构示意图如图2所示。为驱动主推进器和回转推进器,设计了2路PWM控制器,用于回转推进器的正反转控制,从而实现原地回转运动。设计了1路电压信号控制器,用于控制主推进器,实现前进和停车。另外,还设计了状态指示与回传、接触器等一系列附件电路,用于配合实现自主定位功能。该系统的硬件逻辑连接如图3所示。
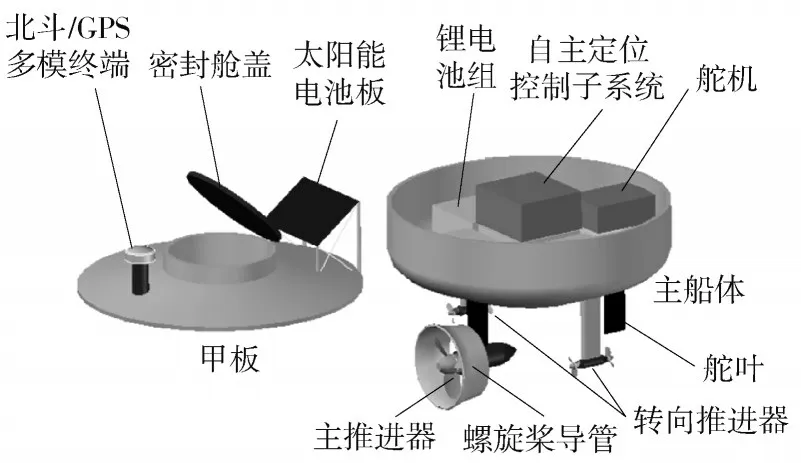
图2 无缆自定位航标结构示意图
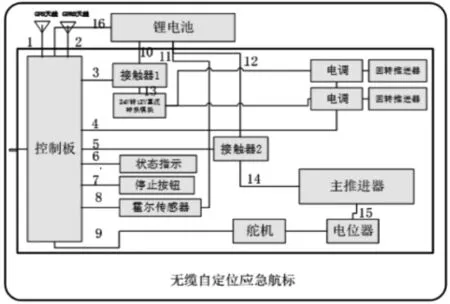
图3 无缆自定位应急航标硬件逻辑连接图
2.3 控制系统设计
2.3.1 控制板软件系统
无缆自定位应急航标嵌入式控制板软件按功能可分为驱动层、协议层、应用层。按照模块划分为系统初始化模块、串口通信模块、FLASH驱动模块、以太网通信模块、定时器模块、A/D模块、D/A模块、GPIO模块、GPS模块、GSM/GPRS模块、中间接口模块、上层业务模块等,如图4所示。
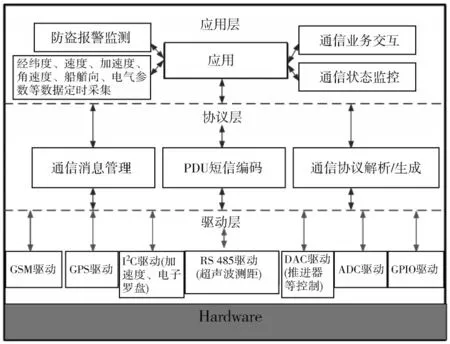
图4 嵌入式软件功能模块
2.3.2 岸基控制端软件
采用TCP/IP方式与网络服务器进行通信,具备管理员权限客户端手动控制无缆自定位应急航标移动能力,同时能接收从服务器端发来的应答及数据。数据交互模块需要以30 s周期向服务器发送心跳包,以15 s周期向服务器发送查询实时数据指令,按需向服务器发送控制指令(即浮标的目标经纬度、浮标运动控制指令、浮标工作状态指令等)、历史数据查询、参数设置、参数查询等指令,并能以文本形式保存服务器返回的历史数据。航标定位界面和控制界面如图5所示。
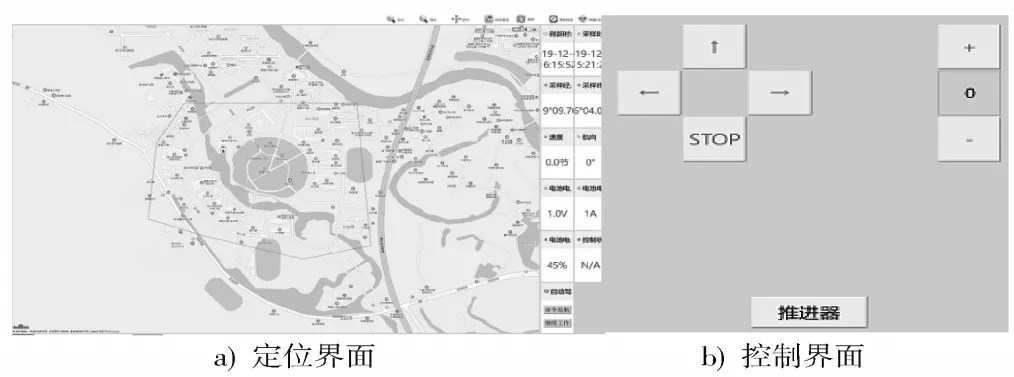
图5 航标定位界面图和控制界面
2.4 控制策略
无缆自定位航标控制逻辑如图6所示,自主定位阶段步骤如图7所示。
在该三维飞行任务空间建立以起点S为原点、S点正东方向为x轴,y轴垂直于x轴且与水平面平行,z轴为过原点且垂直于xoy平面的三维坐标轴Oxyz,如图2所示。
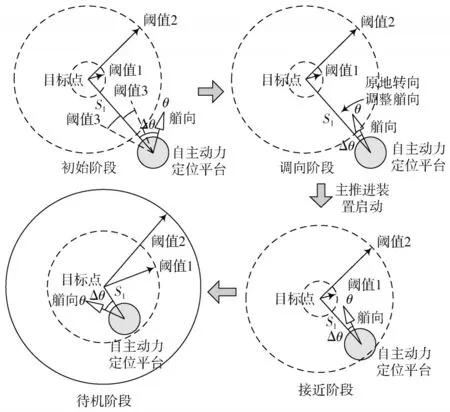
图7 自主定位阶段划分图
本文无缆自定位航标自主动力定位方案流程如下:
步骤1:如图6所示,无缆自定位航标4G/5G路由器接收到来自客户端的控制指令报文,包括目标点经纬度,通过串口传输至自主定位控制子系统的控制板,通过板载解析程序得到目标位置,转至步骤2。
步骤2:无缆自定位航标的北斗/GPS多模终端和罗经实时感知平台的位置和艏向角(以主推进器推力方向为艏向),通过串口传输至自主定位控制子系统的控制板,通过板载解析程序得到当前位置和艏向角,转至步骤3。
步骤3:如图6初始阶段所示,利用控制板的板载控制程序分析当前位置(经纬度)与目标位置(经纬度)距离S1:
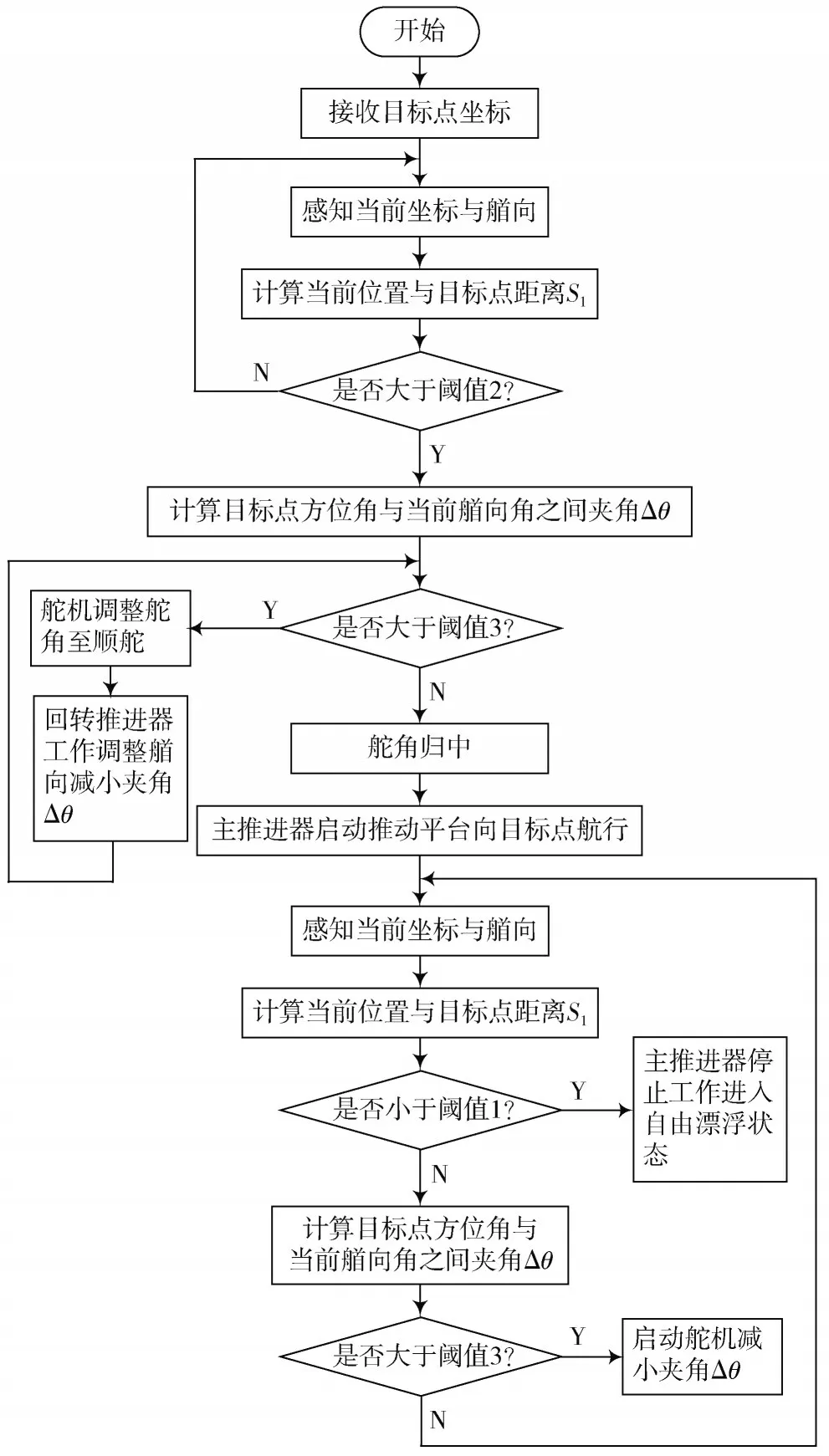
图6 无缆自定位航标控制逻辑图

判断是否超过预设阈值2,若不超过则不动作;若超过阈值2,则计算目标位置相对当前平台位置的目标方位角以及平台当前艏向角,计算艏向偏差角Δθ,若偏差角Δθ小于阈值3,转至步骤4,若偏差角Δθ大于阈值3,向电机驱动器发出指令:
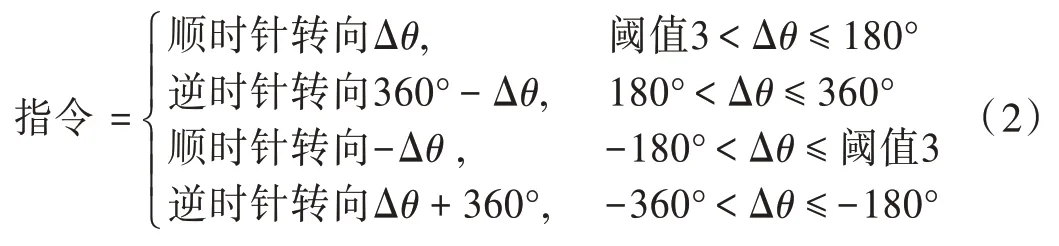
控制回转推进器电机转动,向舵机发出指令,带动舵叶转至顺舵状态,调整平台艏向角至目标方位角,转至步骤4。
步骤4:向舵机发出指令调整舵角至零舵角,向电机驱动器发出指令,控制主推进器电机、回转推进器电机转动,推动平台向目标点航行接近,转至步骤5。
步骤5:向目标点航行的过程中,不断监测当前艏向和目标方位角,若大于阈值3,则向舵机发出指令调整航向,直至当前位置与目标点距离小于阈值1,停止主推进电机和回转推进器电机,转至步骤2。
2.5 仿真实验
2.5.1 静水力性能校核
为获得该浮体的水动力性能,以确定内部设备布置方案,通过Maxsurf软件建立了浮体的三维模型,如图8所示。通过切片法计算,其静水力性能数据如表1所示。
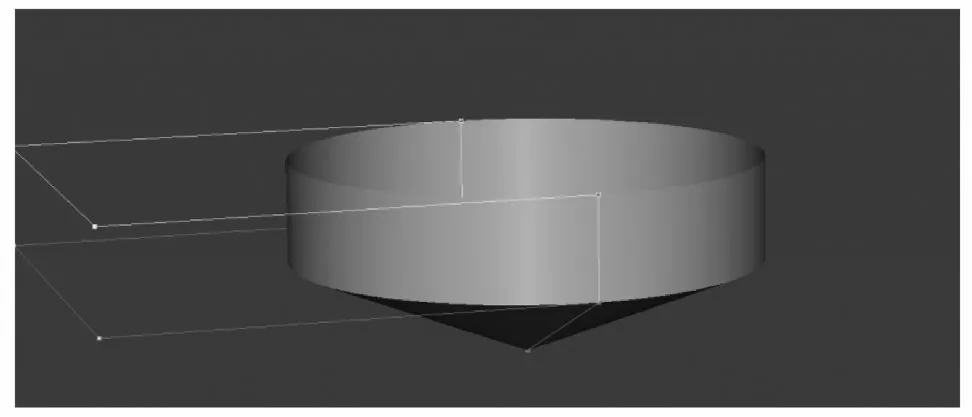
图8 浮标主体三维模型
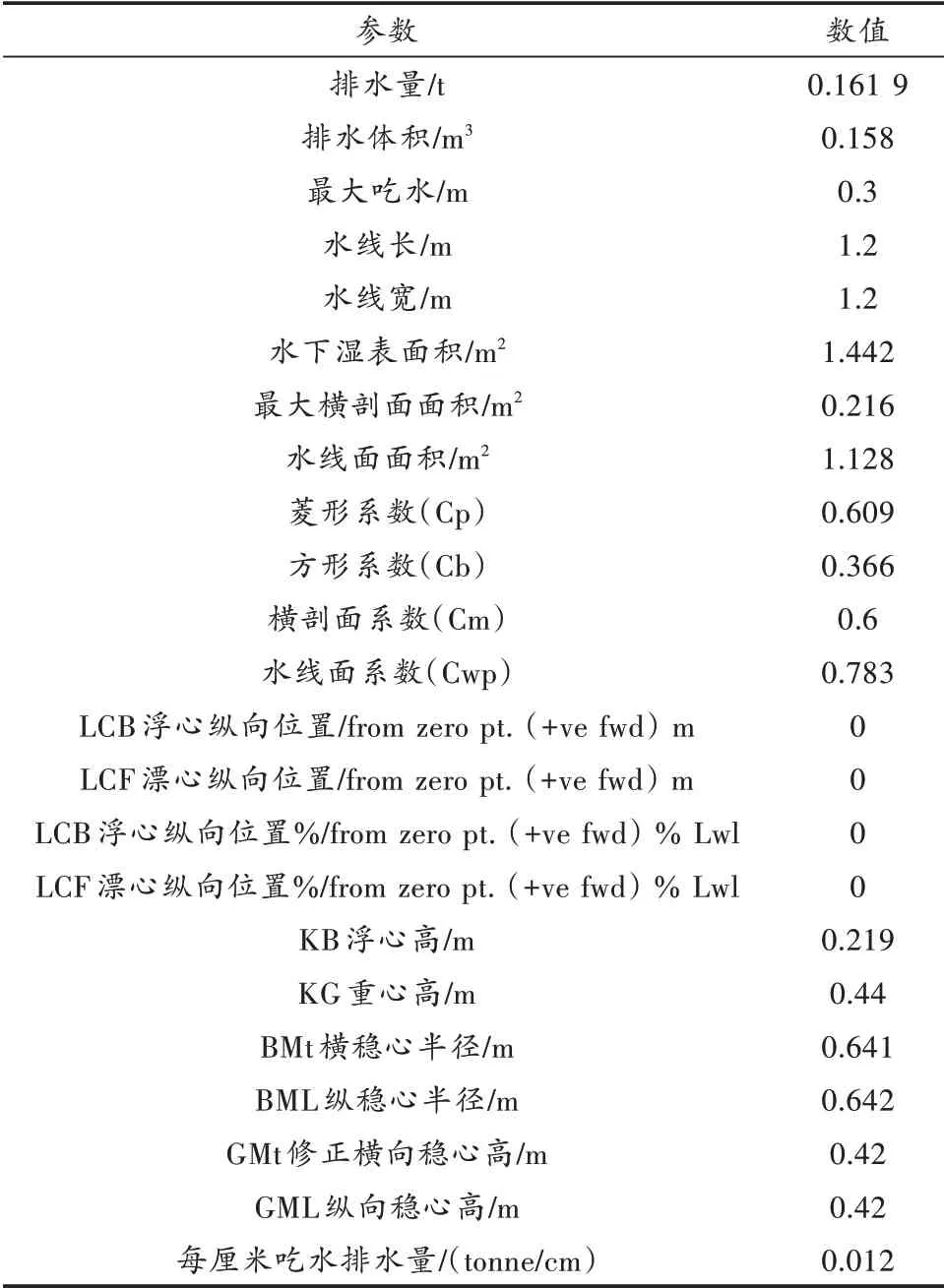
表1 浮标主体静水力性能参数
通过计算可知,该浮体的正常排水量在162 kg左右,储备浮力充足,在可靠性满足需求的前提下,能以多装电池的方式延长续航时间。另外,该浮体的初稳心高达0.42 m,满足稳性要求,可支持航标灯、GPS天线等上部结构的安装。
2.5.2 水动力性能校核
阻力计算方面,由于该浮体形状特殊,无法使用常规船舶所常用的计算方法,只能用经验公式进行估算,采用Wyman经验公式法,对0~4节航速下的航行阻力及推进有效功率进行估计,如表2所示,速度与阻力、功率之间的关系如图9所示。
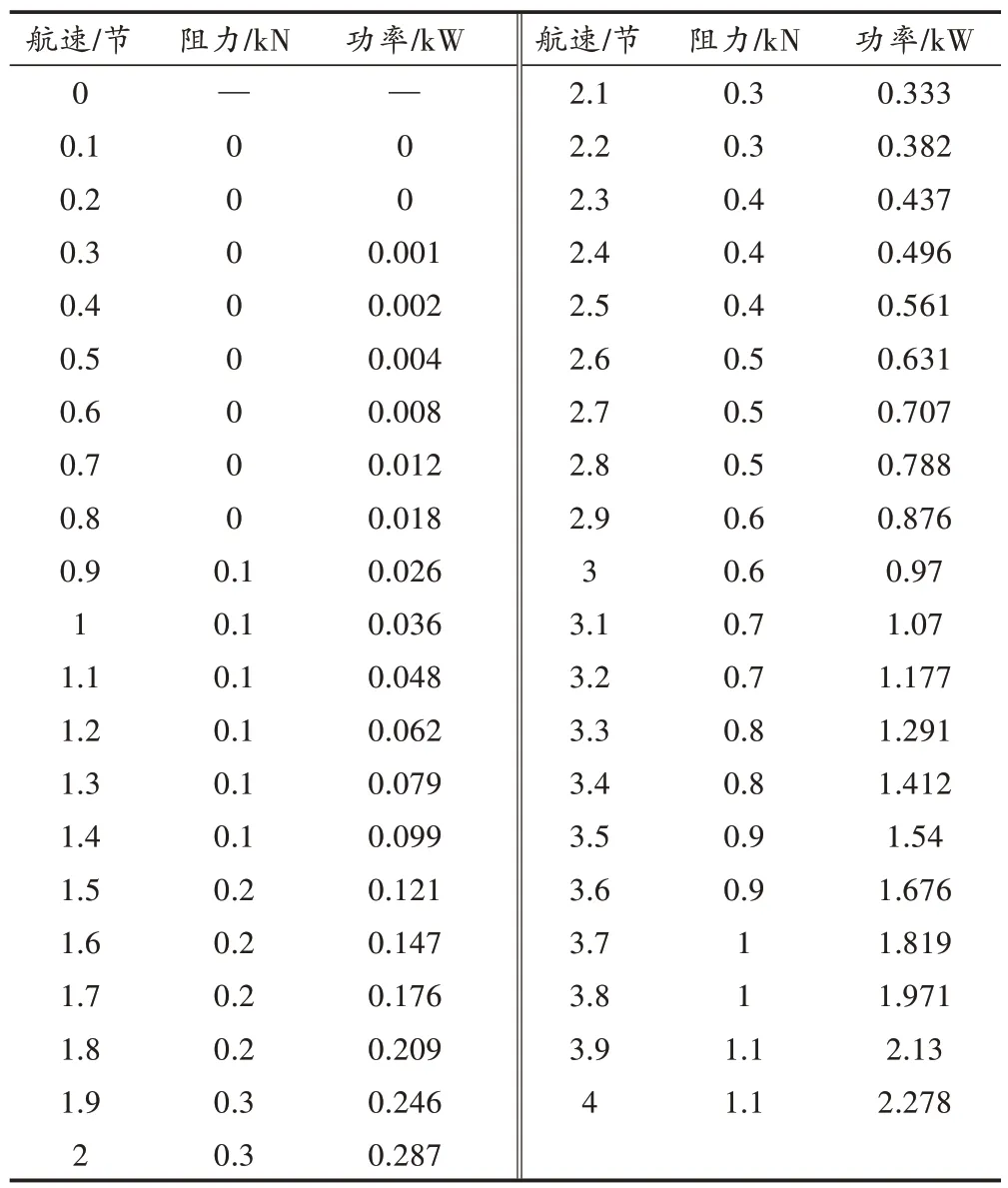
表2 阻力及推进功率计算结果
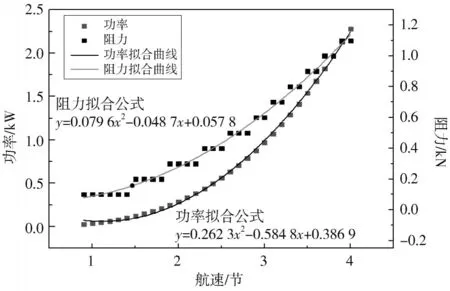
图9 航速与阻力、功率关系图
根据图9可知,随着速度的增加,航标航行阻力和消耗功率呈二次曲线增加,该航标适合于水流流速2节以下的水域,在水流流速较大的水域容易出现推进功率不足、续航时间下降的问题。
3 结语
本文面向应急航标技术功能需求设计了无缆自定位应急航标。针对目前市场中传统航标部署工时长、维护成本高等缺点,引入无人船自主控制技术对无缆自定位应急航标系统进行了技术升级改造,利用新的推进及控制模式,解决了传统动力定位系统操控逻辑复杂、成本高、控制难等问题,仿真实验结果表明,无缆自定位应急航标适合用于水流速度较缓的水域。
