北斗ka星间链路高动态应用辅助接收技术
2023-02-07蔡文炳张中英卢樟健陈玲玲陈宜稳徐连军
蔡文炳,张中英,卢樟健,陈玲玲,陈宜稳,同 钊,徐连军
(1.北京跟踪与通信技术研究所,北京 100094;2.中国空间技术研究院西安分院,陕西 西安 710100)
0 引言
北斗全球系统作为我国第一个全球覆盖的天基信息系统,为全球用户提供PNT与高价值用户的数据传输能力,已经形成真正意义上的航天装备体系能力。尤其北斗三号ka星间链路在满足星座内的通信测量需求之外,规划了对扩展服务用户测控数传支持服务能力,能够为高速移动目标提供全球范围内的通信服务。
北斗全球卫星导航系统星间链路系统采用ka单频单波束相控阵体制,卫星以北斗时为时间基准按照时分复用的方式与网络内节点建立测量通信。星间链路运管中心将系统北斗时分成若干时隙片,规划时隙路由表,卫星根据时隙路由表在规定的时隙内与规定节点建立测量通信,如图1所示。
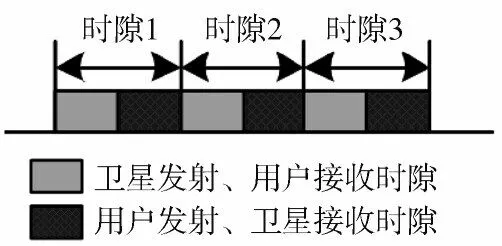
图1 星间链路时隙片划分示意图
北斗三号ka星间链路是短突发信号,需要在百毫秒内完成信号同步,对于高速移动目标,高动态辅助接收技术是实现链路同步的关键。
本文提出了基于“GNSS+微惯性单元”的高动态辅助接收技术,产生用于ka星间链路超高动态下的辅助信息,并对产生的辅助信息精度进行分析。
1 基于北斗ka星间链路航天器测控数传服务
基于ka星间链路的航天器测控数传支持服务业务是将高速移动目标等用户视为星间链路网络的一个新增节点,纳入星间链路网络进行统一规划,给高速移动目标分配SCID编号、建链时隙和建链路由。高速移动目标按照规划与北斗卫星建链。高速移动目标地面测控系统将前向数据通过境内节点卫星进入北斗网络,经过星间中继到达境外节点卫星,在建链时刻发送给高速移动目标;同时境外节点卫星将接收到反向数据,经过星间中继到达境内节点卫星,再建链时隙传输至高速移动目标地面中心,如图2所示。
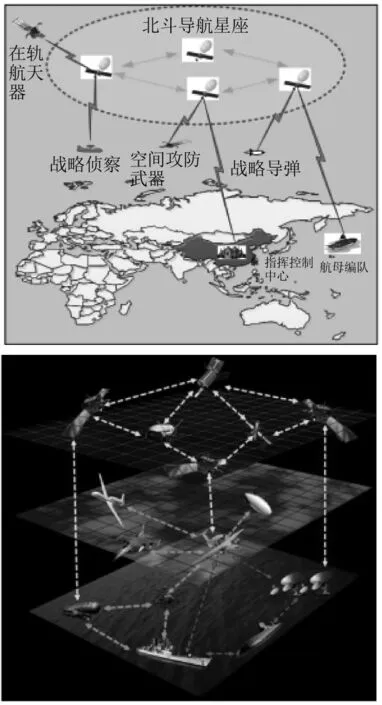
图2 北斗ka星间链路的测控数传支持服务架构
2 高动态辅助信息接收技术
2.1 “GNSS+微惯性单元”的开环辅助接收技术
当高速移动目标动态较大时(速度为12 km/s,加速度为11 kHz/s),采用普通的信号跟踪技术已经无法满足动态要求。采用“GNSS+微惯性单元”对接收机的概略位置、速度/加速度进行估计,结合卫星星历,计算用于ka星间链路接收的时间、距离、速度和加速度、天线指向的预报值,开环辅助ka星间链路的接收,辅助之后的速度误差小于1 kHz,满足ka星间链路短突发信号的接收要求。
图3是“GNSS+微惯性单元”的辅助接收单元框图。利用微惯性单元(INS)的速度、加速度测量结果,与GNSS构成超紧组合,输出位置、速度、加速度、时间信息,结合卫星星历,归算出ka星间链路时间、距离、速度和加速度、天线指向的预报值,辅助ka星间链路信号的接收,使ka频段接收环路采用噪声带宽较窄的跟踪滤波器快速实现接收信号同步。
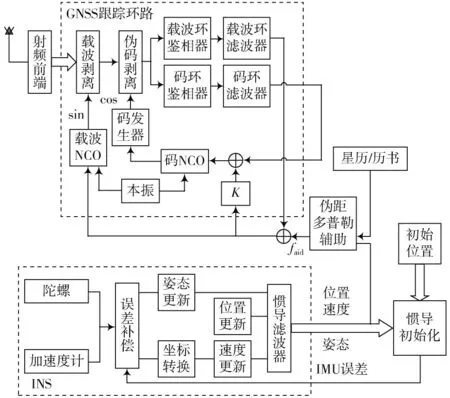
图3 基于“GNSS+微惯性单元”的辅助信息生成
惯性系统误差决定了辅助信息的精度,需要根据惯性系统的误差评估载体测量的速度精度。
惯性器件误差主要包括安装误差、刻度系数误差、零偏误差与随机噪声。按照上述误差因素对设备采用的惯性系统误差进行理论仿真。惯性导航姿态精度如图4、图5所示,图4中纵轴单位是角秒,图5中纵轴单位是角分。
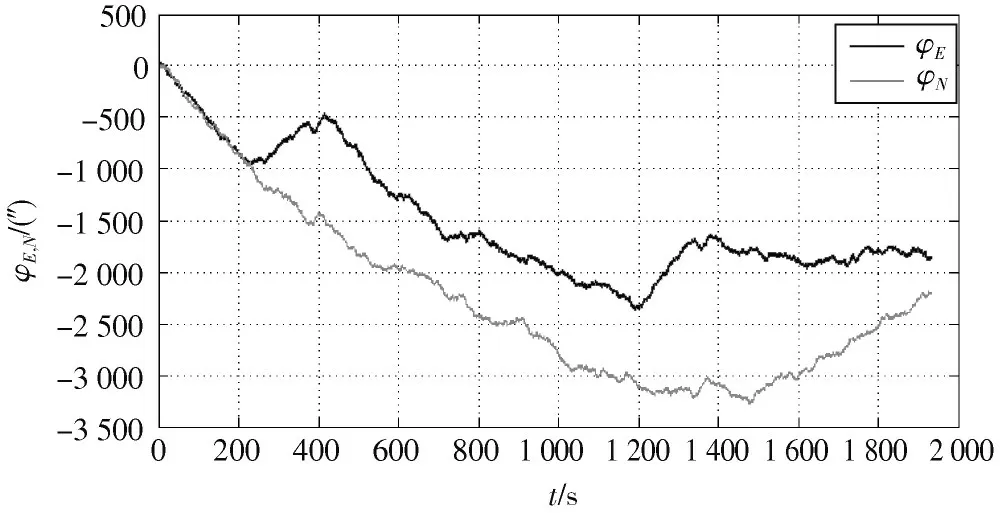
图4 水平姿态精度
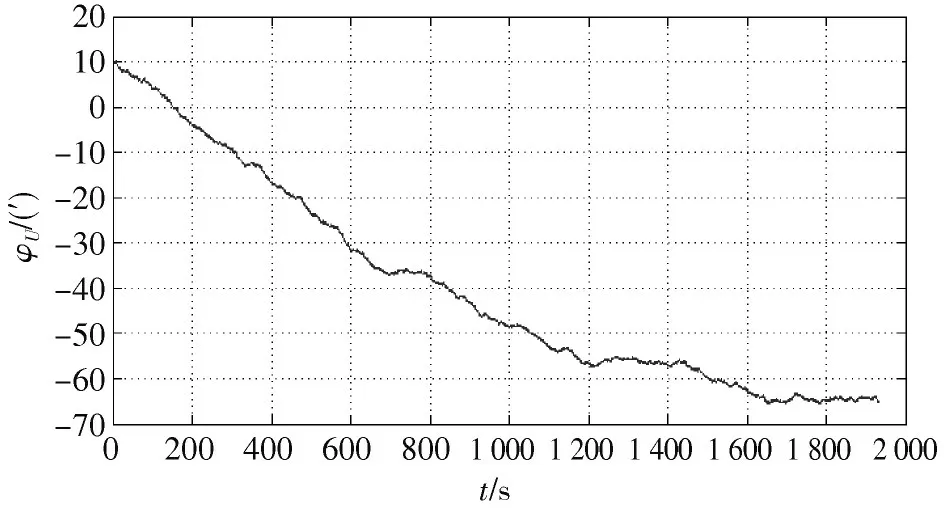
图5 航向角精度
由图可知惯性器件水平姿态(俯仰角和横滚角)精度在0.05°以内,航向角在0.1°以内。
由于惯导是直接测量加速度计的设备,在器件量测范围内,加速度计的测量精度基本不变。图6是惯性器件的三维加速度计测量精度仿真图。
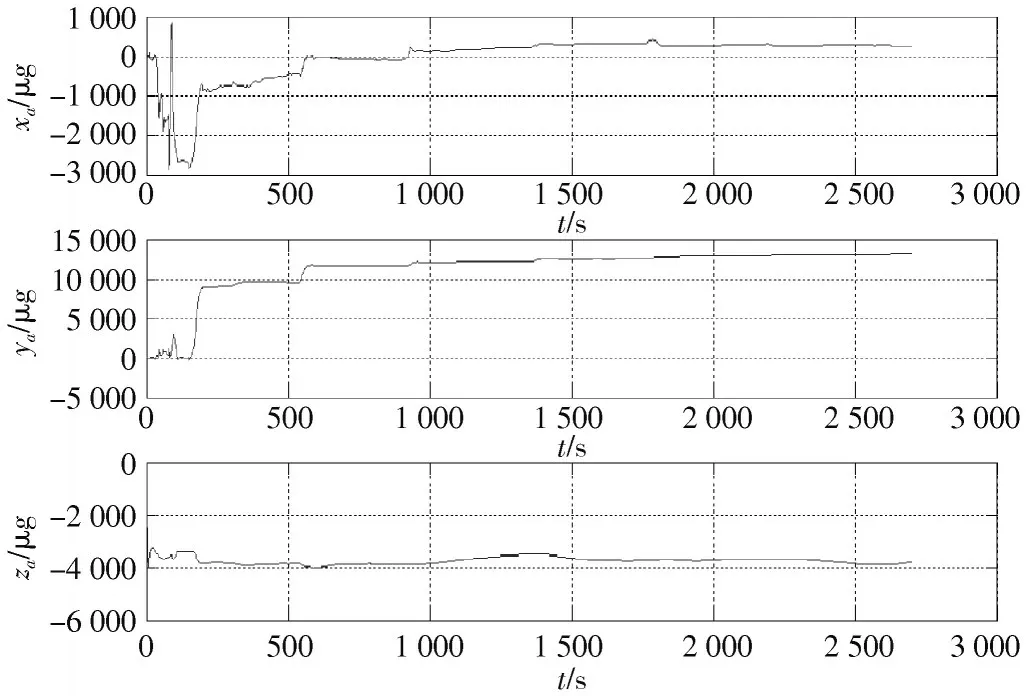
图6 三维加速度精度
2.2 GNSS超紧组合导航技术
利用“GNSS+微惯性单元”辅助信息产生单元,关键技术是GNSS的超紧组合技术,用于产生终端的位置、速度、加速度信息,进而用于产生ka星间链路的辅助信息。
2.2.1 超紧组合跟踪结构设计
GNSS接收机跟踪环路更新速率较高(通常可达到1 kHz)、瞬态响应误差大且易受环境影响,因此用于辅助跟踪环路的信息应当具备数据率高、短时精度高、动态特性好且完全自主不受外界环境影响的特点,惯性导航信息满足上述所有条件。惯性信息辅助跟踪环路技术是GNSS/INS超紧组合的关键技术之一,也是超紧组合区别松组合与紧组合的主要特征,GNSS/INS超紧组合系统结构设计的关键就是如何将INS辅助信息引入到接收机跟踪环路。本文设计如图7所示的超紧组合结构。
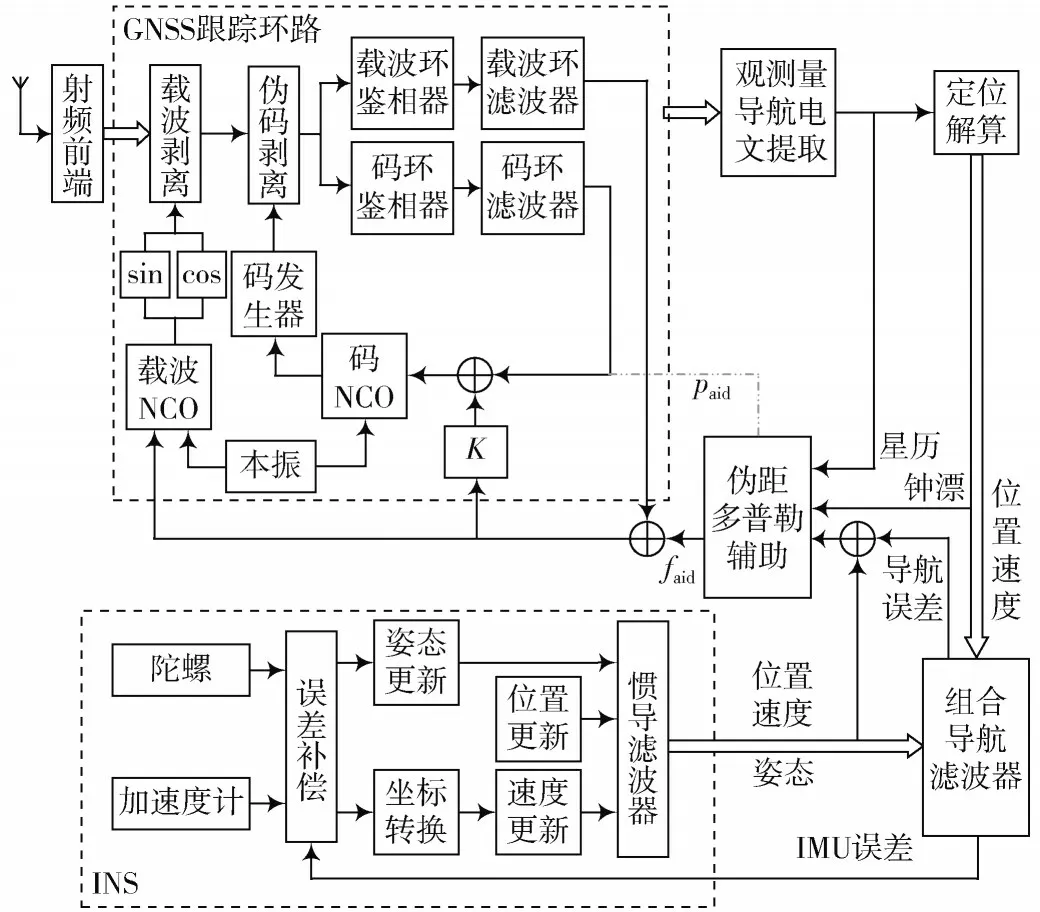
图7 GNSS/INS超紧组合结构
其中,GPS接收机与INS各自独立工作,接收机天线接收到的信号依次经过射频前端、基带数字信号处理和导航定位解算之后输出载体的位置与速度,输出速率为1 Hz;惯性导航系统则工作在较高的速率下,IMU不断测量载体加速度与角速率信息并依次经过误差补偿、初始对准与惯导机械编排解算后得到高速率(100 Hz/1 000 Hz)的载体位置、速度和姿态。更高的惯导解算和辅助精度可以提高环路对动态的适应性,但是需要更多的计算资源。
接收机设计采用矢量跟踪环进行深耦合实现,设计基于矢量跟踪的频率锁定环路以提高环路的动态适应性。
2.2.2 基于矢量跟踪的高动态跟踪环路
矢量跟踪结构的框图如图8所示。对于图中所示的接收机,信号跟踪和导航状态估计的任务不再是单独的过程。单个扩展卡尔曼滤波器(EKF)可同时跟踪接收到的信号并估算接收器的位置、速度等。矢量延迟锁定环(VDLL)仅通过中央滤波器跟踪PRN码相位。载波跟踪任务仍由VDLL中每个通道中的标量跟踪循环处理。矢量延迟/频率锁定环(VDFLL)使用集中滤波器跟踪PRN码相位和载波频率。
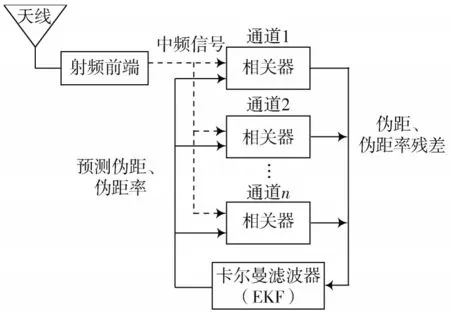
图8 矢量跟踪结构
矢量跟踪根据接收机的估计位置和速度预测接收信号的相位和频率。通过获取预测信号和接收信号之间的差异,在每个通道中形成残差;然后使用残差更新接收器位置和速度的估算值。矢量跟踪方法利用了接收者动态与跟踪环路所预测的动态之间的关系,不是跟踪接收器的每个通道来跟踪各个信号的动态,而是跟踪引起信号变化的用户动态。
所使用的扩展卡尔曼滤波器可以以位置、速度、钟差相关参数为状态量,也可以以伪距、伪距率为状态量。本文采用后者以实现对高动态信号的跟踪。
2.2.3 高动态超紧组合性能仿真
终端使用的惯性器件采用100 Hz和1 000 Hz可变的惯性多普勒频率辅助频度,在速度为12 km/s,加速度为11 kHz/s的使用场景下,使用Matlab对超紧组合方案进行仿真,三维速度误差优于0.2 m/s,三维位置误差优于10 m,仿真结果如图9、图10所示。
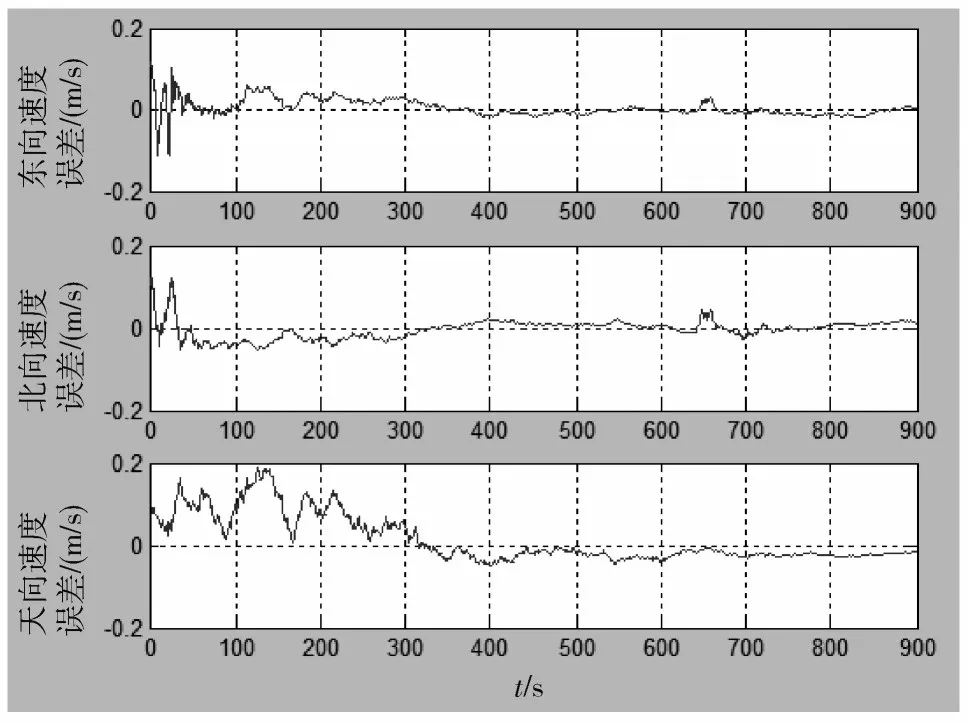
图9 超紧组合导航速度误差仿真分析
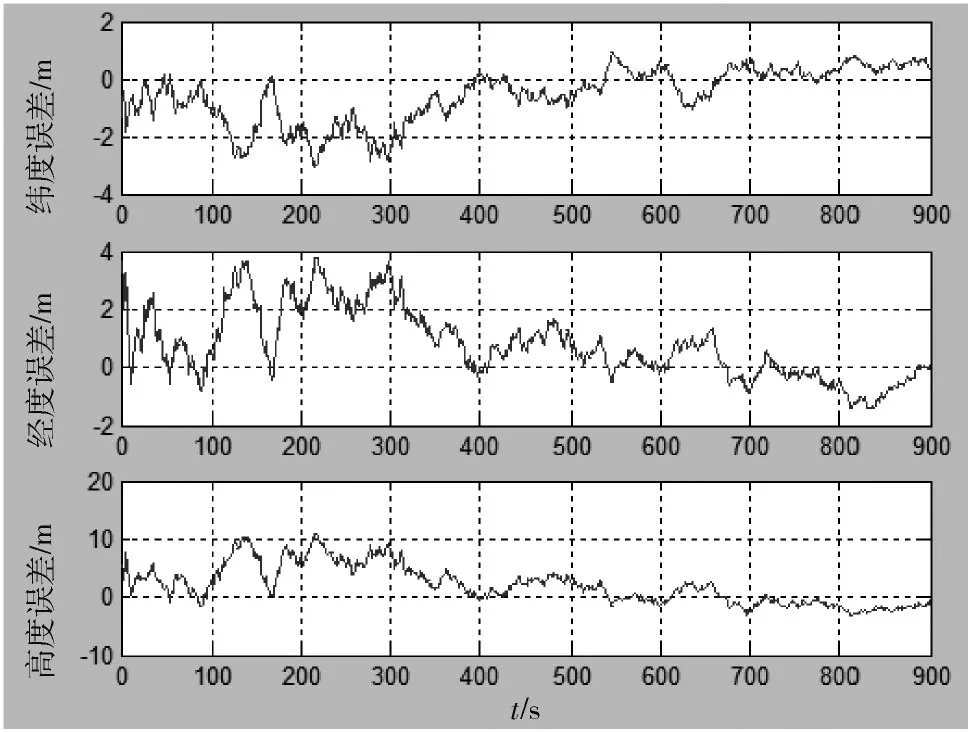
图10 超紧组合导航位置误差仿真分析
3 辅助信息精度仿真验证
3.1 定位授时精度分析
北斗三号系统的广播电文误差URE为0.5 m,接收机测量噪声为0.33 m(1σ),根据北斗三号全球几何精度因子,利用“GNSS+微惯性单元”辅助信息生成方法产生的定位精度预算为水平6 m,高程9 m,定位误差估算如表1所示。
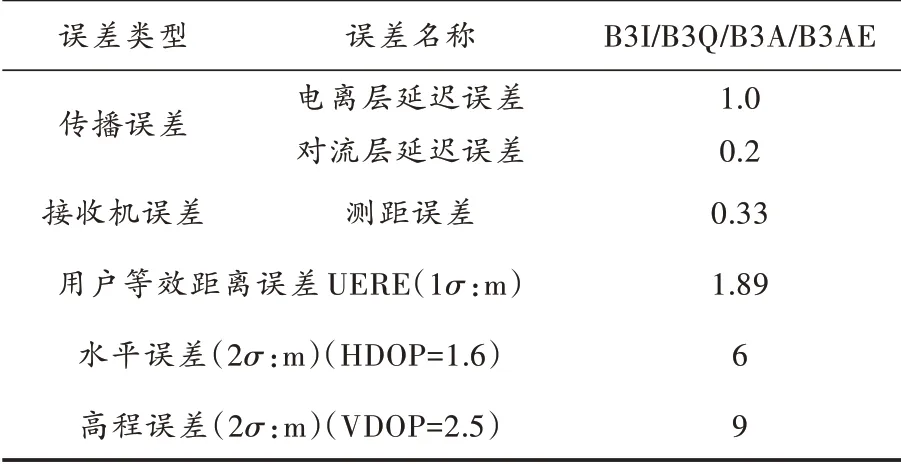
表1 定位误差估算
GNSS授时误差(1 pps误差)来源主要为用户等效测距误差(UERE),用户等效测距误差造成的时间同步误差计算公式为:

式中:TDOP=1,c为光速,因此钟差测量精度δt=1.89 c=6.3 ns。综合考虑采集误差、标校等误差大约为10 ns,时间同步度为16.3 ns,授时误差不超过20 ns。
3.2 天线指向辅助精度分析
天线指向受两部分因素影响:载体自身的姿态测量精度以及由于卫星星历误差与载体定位测量误差引起的指向误差。
卫星星历误差小于1 m,载体定位误差优于10 m,由于载体与卫星间的轨道差20 000 km,10 m量级位置误差对于指向的影响几乎可以忽略。
姿态测量精度引入的指向误差小于俯仰角误差+横滚角误差+航向角误差≈0.465°。因此在卫星导航模块可用条件下,天线指向辅助精度<0.465°。
3.3 TOA预报精度分析
ka星间链路TOA预报分为伪距、速度和加速度预报精度三类预报数据。
伪距是载体与卫星之间的径向距离,其预报精度由载体位置测量精度和卫星星历径向精度决定。根据卫星导航模块精度分析,位置精度优于10 m,星历径向精度为0.1 m。因此卫星导航模块可用条件下,预报精度主要由载体位置测量精度决定,仅考虑位置误差的情况下伪距预报精度优于10 m即33 ns,优于建链66 µs要求。
同理分析,速度和加速度预报精度都是指载体与卫星之间的径向相对速度和径向相对加速度,卫星星历引入的误差都在厘米级,可忽略,主要误差为载体自身的速度和加速度测量误差引入。径向速度测量精度<载体三维速度测量误差,根据前面分析,在组合导航条件下,速度测量误差小于0.2 m/s,因此速度预报精度小于0.2 m/s,对于星间链路的ka频段为15 Hz。
组合导航条件下,加速度测量误差主要取决于惯性器件,根据前面分析,加速度测量误差<20mg≈0.2 m/s2,ka频段为15 Hz/s2。
利用飞行器终端“GNSS+微惯性”模块,产生位置、速度、时间、姿态信息,结合卫星星历,计算TOA预报值、速度和加速度预报、天线指向参数的精度如表2所示。
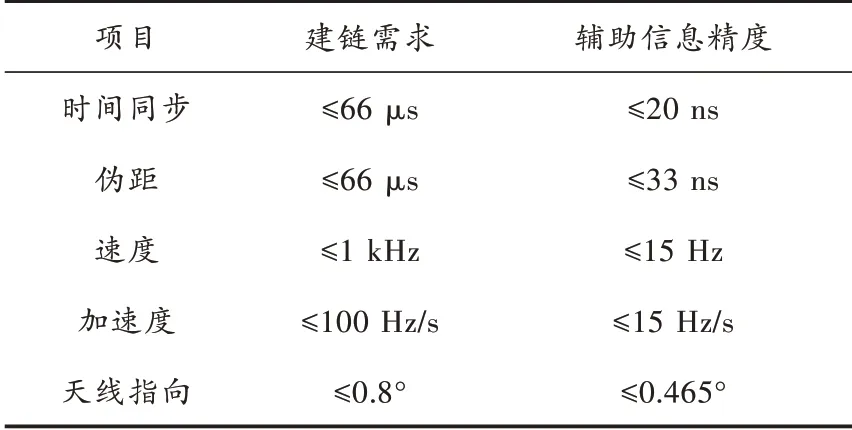
表2 辅助参数精度
4 结论
本文通过对北斗ka星间链路为高速移动目标提供测控服务研究的基础上,得出系统在使用时面临的难点在于高动态的接收技术。在飞行器速度为12 km/s,加速度为11 kHz/s时,现有信号同步技术已经无法满足要求,针对该难点,本文提出一种“GNSS+微惯性单元”高动态辅助信息接收技术,超紧组合导航算法,结合卫星星历,解算出与ka星间链路建链所需的位置、距离、时间、速度、加速度、天线指向信息,高动态条件下,在百毫秒内实现信号快速同步。本文提出的高动态应用辅助接收技术可以实现北斗三号ka星间链路高动态快速建链的需求。
