智能喷涂机器人的研究与应用
2023-02-04袁子祺苏炜斌梅晓君陈钱宝
袁子祺,苏炜斌,梅晓君,陈钱宝
(1.中铁上海工程局集团市政环保工程有限公司,上海 200436;2.中国中铁双碳专业研发中心建筑材料分中心,上海 200436)
1 研究背景
目前,大部分建筑墙体外立面喷涂作业还依赖于人工作业。然而,在喷涂过程中会释放出大量苯、醛等有害物质,这些物质会对环境造成污染,若长时间处在高重复度喷涂工作环境下,会严重危害施工人员身体健康。另外,外界对人工喷涂的影响很大,可造成导致环保标准未达标,涂料利用率低下,喷涂质量不够稳定,返修率较高等现象,从而限制了生产能力及产品质量的提高[1-4]。
近年来,针对人工喷涂机器人所面临的多种问题,一些专家和学者在近几年对喷涂机器人有关问题做了一些相关研究。自1972 年起,意大利人开始研究喷涂机器人,以机械工业化替代人工施工作业从而显著降低了涂料对人体的潜在危害[5]。Asadi 等[6]研发了一款基于人机协作的喷涂机器人,其喷涂参数可由技术人员进行精准控制和调节,通过遥控方式实现对机器人远程的高效操控。我国对建筑机器人研究的重视程度也很高,但在实践中也存在不少问题。荣易升[7]设计移动式内墙喷涂机器人及周围环境建模、机器人路径规划设计和仿真实验。在实验过程中,喷涂机器人处于一个非常复杂的施工环境,这会导致对于机器人的各个方面的条件都有很高的要求。但该文献对机器人的逆运动学求解并没有进行较为深入的分析。为了解决这一现状,本文研发了一种自动化喷涂机器人设备,在兼顾安全性和稳定性的条件下,以自动化喷涂机器人来代替人工施工,降低了高空作业的风险,避免了涂料对于喷涂施工人员身心健康的伤害,提高了施工作业效率。与此同时,也降低了施工作业成本。
2 硬件结构设计
2.1 总体结构概述
喷涂机器人设备主要由3 部分组成:机械臂、升降平台、麦克纳母轮小车。喷涂机器人各项指标如下(图1)。

图1 喷涂机器人总体结构
有效载荷(kg) 5
最大工作半径(mm) 1 000
关节数(个)6
关节活动范围 ±360°可持续转动
最大移动速度(m/s) 1
重复定位精度(mm) ±0.02
机械臂自重(kg) ≤25
工作温度(℃) 0~50
防护等级 IP54
软件能力 自行开发、模块化
2.2 机械臂
为适应喷涂过程中可能出现的复杂喷涂轨迹的要求,该机器人可实现机械臂均匀摆动,通过对机械臂各部分元件的组合控制,控制喷涂距离、速度和喷涂角度等参数,使得机械臂可以呈现出各种姿态以满足各种轨迹的需求,不仅可以大幅增加机器人喷涂过程中灵活性,保证良好的喷涂质量,还可以实现对外墙的喷涂,工作效率高、安全系数高,喷涂更均匀。机械臂布局外形图如图2 所示,机械臂相关参数设置细节如表1 所示。

表1 机械臂相关参数设置细节
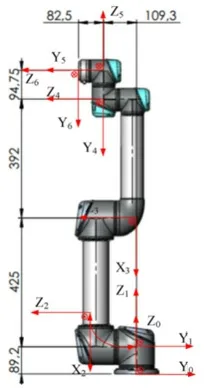
图2 机械臂布局外形图
2.3 升降平台
机器人在进行喷涂工作时,会面临工作区域空间狭窄,施工环境复杂的问题。而机器人的部分装置重量较重,要频繁移动来改变施工的位置,易于组装的升降平台通过升高或降低沿垂直轴移动来增加协作机器人的可达范围,以使其始终处于最佳工作位置。这样不仅能够保障工人的人身安全,还能节省完工时间和加工成本、减轻工人的劳动强度、提高工作效率。
升降平台主要由电机、内外丝杆、导轨、壳体、控制元器件等组成,布局外形图如图3 所示。依据实际情况,所需升降平台需要适应不平整路面环境,且转运能力要求较高,具体基本参数如表2 所示。

表2 升降平台基本参数

图3 升降平台布局外形图
2.4 锂电池选择
麦克纳姆轮小车电池选用48V/15Ah 的锂电池,该电池的容量可以保证小车的运行时间在3~5h 之间,具体工作时间视实际工况来决定。
2.5 电路设计
为了保证硬件电路系统的安全、可靠和高效,在整个系统设计过程中以单片机为核心,严格按照规范进行设计制作。
1)系统扩展和外设配置水平应充分满足应用系统的功能要求,并为二次开发留出适当的空间。
2)硬件结构应与应用软件方案综合考虑。硬件结构和软件方案会产生交互作用,所以软件所能实现的功能尽可能通过软件实现,以简化硬件结构。
3)可靠性及抗干扰设计,包括通道隔离、印刷电路板布线、印刷电路板布线、花片、去耦滤波器件选择等。
4)单片机外围电路较多时,其驱动能力是必须考虑的因素之一。使电路设计尽量简洁,尽量减少元器件使用数量,缩小电路板面积,使电路部分重量轻,易于安装。
通过比较和测试,选择线性稳压芯片TS5430,AS015,TPS333Q为各模块供电。此供电系统中使用的电压分别为19V、12V、24V,对电池电压要求较高,因此选用了24V-4500mAh 无人机电池加24V 转19V 降压模块给PC 端供电。主控及驱动统一用24V 供电,电磁铁使用12V供电,电磁继电器、编码器、D 触发器使用24V转5V 供电,单片机、陀螺仪、串口通信使用TPS7333Q3.3V 供电。使用可调AS1015 模块给舵机供电,采用了单个独立的电源分配电路板,其余设备均从电源分配板上采电。
主板采用24V 直接供电,用开关稳压芯片TPS5430 把24V 降到5V,经TPS7333 把5V 降到3.3V 从而给各需要的部分供电。
舵机部分电源,先用LB2596 模块把24V 转到12V 然后经可调AS1015 模块降到合适的电压来给舵机供电。AS1015 模块输出电压稳定,输出功率高,用D1015 给2 台舵机供电。
驱动模块的好坏直接影响到电机转动的能力,进而影响到的速度。MOS 管驱动IPD034NMOS 管理论能最大产生大电流,并具有极低内阻,采用4 块 HIP4082 驱动8 个PD034N-MOS组成全桥用于麦轮小车的驱动,输出功率能达到很高,对于麦轮的前进、后退、左右平移及固定角度等都有很大的优势。
3 软件功能设计
小车控制系统由3 部分组成:运动控制、升降平台运行、机械臂运动,三者相互配合。操作人员通过手柄控制麦轮小车的前后左右运行,根据工况升降平台自动上下,机械臂带动喷嘴在设定的区域内工作。软件设计流程图如图4、图5 所示。

图4 下位机软件流程图
3.1 速度控制
PID 控制器是一个三项控制器,也是一种线性控制器。PID 将偏差的比例(P)、(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,根据给定值与实际输出值构成控制偏差,解决了自动控制中系统的稳定性、快速性和准确性的相关性问题。原理框图如图6 所示。
3.2 陀螺仪
采用了六轴陀螺仪加速度计MPU6050,该模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态情况下输出模块当前的姿态,进行角度测量,使用UART 模块采集车的车身姿态角度。在实际运动过程中发现,由于麦克纳姆轮运动时,只使用编码器在快速直线或斜线移动时车身姿态会偏斜,且距离越长,偏斜角度越大,使用陀螺仪能始终保证车身姿态稳定。
3.3 通信协议
RS-232 也称标准串口,是最常用的一种串行通讯接头。RS-232 采用不平衡传输方式,即所谓的单端通讯。
4 结语
为了解决人工喷涂普遍存在效率低下、均匀性欠佳、材料浪费耗损严重、工作人员在户外作业环境差、劳动强度大且安全系数低的问题,研发了一种自动化喷涂机器人设备,可以代替传统人工施工带来的缺陷,与其相比该设备具有以下特点。
1)精准的喷涂质量 喷涂机器人采用高精度的喷涂控制系统和先进的喷涂技术,能够实现高质量的喷涂效果。
2)高效的生产效率 喷涂机器人具有高速运动和快速喷涂的能力,可以大大提高生产效率,减少人工操作的繁琐和风险。
3)良好的适应性 喷涂机器人可以适应各种材料和形状的喷涂需求。
4)操作简单方便 喷涂机器人采用智能化的控制系统和人机交互界面,操作简单方便,易于使用和维护。
综上所述,该喷涂机器人是一款性能优异、适应性强、操作简单方便的自动化涂设备,具有广阔的应用前景。