基于GPS/BDS伪距多普勒观测值的导航定位算法研究
2023-01-31范海英
范海英
(辽宁科技学院 资源与土木工程学院,辽宁 本溪117004)
全球定位系统(Global Positioning System,GPS)是由美国开发的一种支持全球范围内的高精度定位、导航和授时测量的导航系统[1]。北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)是由中国研发的全球卫星导航系统,该系统自2012年12月27日起开始为亚太地区用户提供使用[2]。研究表明,GPS和BDS的组合定位可以获取较高精度的定位结果。因此,GPS和BDS的组合定位被广泛应用在车载导航定位、工程建筑变形监测等不同的领域[3-4]。
目前,国内外学者针对GPS和BDS的组合导航定位提出了许多新的算法。陈亮等[5]采用二阶高斯马可夫过程模型改进了传统BDS/GPS组合导航定位解算过程中的定位跳跃问题。王世进等[6]利用附有模糊度参数的Kalman滤波模型和MLAMBDA方法计算得到BDS/GPS系统的定位结果。Xiong等[7]利用GPSToolkit软件和卡尔曼滤波器研究了GPS/BDS组合精确单点定位模型。闫飞等[8]采用高度角定权的方法来确定相应观测值的权重,利用经典最小二乘法建立森林BDS/GPS组合定位算法,最终实现森林观测点的三维坐标解算。
综上所述,虽然GPS/BDS导航定位算法的研究取得了一些进展,但在使用该技术获取高精度的导航定位结果方面,仍有许多问题值得进一步研究。因此,本文首先对现有的基于GPS/BDS导航定位算法进行详细梳理,然后针对定位算法中存在的不足,提出了基于GPS/BDS伪距多普勒观测值的抗差自适应定位算法。最后,本文利用静态数据人为加入粗差的方法,对算法的可行性和可操作性进行改进,并设计了针对不同的路段、不同的场景的车载动态实验。
1 GPS/BDS导航定位算法的研究分析
当前GPS/BDS组合导航定位算法的研究主要有以下三个方面:一是建立可靠地函数模型和随机模型,以实现可靠的定位解算;二是对模型误差进行探测、诊断与调整;三是使用合适的滤波算法和测量值获得更为精确的运动信息。
1.1 GPS/BDS导航定位模型的建立
为了更好地发挥GPS/BDS组合系统的性能和优势,通常将GPS和BDS两个系统的伪距观测量综合起来进行定位解算[9]。如图1所示,接收机通道可以给出GPS和BDS系统的卫星星历、接收信号的时间和多普勒等信息。
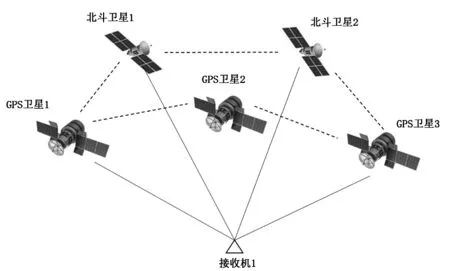
图1 GPS/BDS组合定位示意图
GPS/BDS导航定位模型同时包含函数模型和随机模型两个部分。其中,函数模型是描述GPS/BDS导航定位模型中位置观测向量与用户状态向量间的数学函数关系模型。随机模型是描述GPS/BDS导航定位模型中位置观测向量及其相互间统计相关性质的模型[10]。具体的建模过程为:
首先,引入单个卫星导航系统的观测方程。其方程如下所示:
y=AX+ξ
(1)
式(1)中,y是m×1维伪距观测向量;A是系数矩阵;X是伪距观测参数;ξ为观测误差。
其次,联立GPS导航系统和BDS导航系统的伪距观测方程。最后,对GPS/BDS导航定位观测参数进行解算,并得到该导航定位模型的5个未知参数。其中,(xu,yu,zu)为用户在WGS-84坐标系下的位置坐标,ΔlGPS和ΔlBDS分别表示两种观测系统的距离误差[11]。
利用伪距观测量进行GPS/BDS导航定位解算,一般采用最小二乘估计和卡尔曼滤波方法。由于卡尔曼滤波方法利用了更多地被估计量的先验信息。因此,卡尔曼滤波方法对系统状态的估计优于最小二乘估计。然而,卡尔曼滤波方法需要首先构建准确的函数模型和随机模型,但在实际应用中,部分卡尔曼滤波模型中的参数无法获取。同时,不同的随机模型会影响观测方程的参数估计和精度评定[12]。组合两者建立函数模型时,合理确定二者权重比也是进行高精度GPS/BDS导航定位的前提。
1.2 GPS/BDS导航定位模型中的误差探测和诊断
使用GPS和BDS组合定位技术导航定位的过程中,不可避免地存在观测异常或粗差。如果不对粗差进行处理,最终解算得到的估值将会存在较大的偏差。因此,GPS和BDS导航定位误差的探测和诊断非常重要。目前应用最广泛的误差探测方法为IGG III,其权函数如下所示:
(2)

在对观测值粗差探测的过程中,IGG III抗差模型存在异常观测值残差的转移问题,通常会对探测效果产生一定的影响。此外,探测动态模型误差时采用的移动开窗估计法的窗口大小不易确定。因而,GPS/BDS组合导航定位中,对观测误差和动力模型误差的有效探测是需要解决的关键问题。
1.3 GPS/BDS动力模型的构建
针对运动物体的导航定位,我们需要对物体下一时刻的运动状态进行预测。预测总是基于一定的规则,对于运动物体而言,常用的运动模型有:常速模型(CV)模型和常加速模型(CA)[14]。
其中,直角坐标系下的常速模型(CV)为:
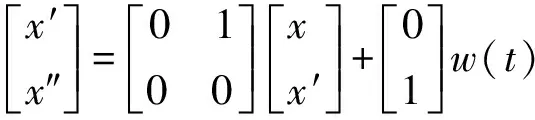
(3)
常加速度模型(CA)为:
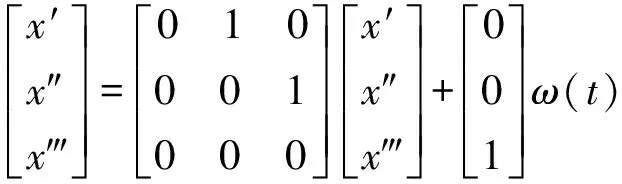
(4)

在对物体的运动状态进行预测之后,需要使用合适的滤波算法和测量值对预测值进行更新,从而获得更为精确的运动信息。笔者认为,通过运动模型和滤波算法的结合使用,可以构建得到GPS/BDS的动力模型,但运动载体的运动状态通常难以精确描述。为此,需要合理地确定动力学模型信息与观测信息的权重比,从而实现抗差自适应。
2 基于GPS/BDS伪距多普勒观测值的抗差自适应定位算法
通过对GPS/BDS导航定位系统两类观测值随机建模、实时动态误差探测和自适应滤波方面存在的问题进行归纳和总结,文章提出了基于GPS/BDS伪距多普勒观测值的抗差自适应定位算法。该算法根据GPS/BDS双系统,建立合适的随机模型,满足实时动态数据处理的要求;针对GPS/BDS观测误差,建立基于伪距单差的探测法,消除粗差影响;针对动力模型误差,在一步抗差解算的基础上,构造自适应因子,实现抗差自适应。
2.1 GPS/BDS随机模型的建立
GPS/BDS信号在传播的过程中受到各种误差和干扰。如果接收机接收到的卫星信号较强,那么GPS/BDS信号在传播过程中受到的误差和干扰就会小得多。将其赋予较大的权值,可以提高GPS/BDS定位精度。同时,卫星高度角越小的卫星,其所受到大气层传播误差越大,不利于定位结果精度的提高。所以,应该将卫星高度角较小的卫星在解算中赋予较小的权重比[16-17]。结合以上两种情况,文章利用载噪比法和卫星高度角法建立GPS/BDS随机模型。其中,根据卫星高度角法定权法建立的随机模型为:
(5)
式中,E为第j颗卫星的高度角;sigmaj为各个导航系统在天顶方向上的精度。
载噪比的定义如下:
(6)
式中,N0为噪声功率谱密度,PR为信号的接收功率。
2.2 两步法误差探测
观测设备误差、传播路径误差、相对论误差、卫星星历误差等导致GPS/BDS伪距观测值中含有大的粗差。为了对伪距单差的粗差进行探测和剔除,文章提出两步法误差探测模型。该模型包含基于伪距单差函数模型的粗差探测及抗差M估计。
基于伪距单差函数模型的粗差探测主要用于研究单历元伪距单差的函数模型、分析相应参数的特性、探测粗差。公式(7)为历元k的伪距观测方程。
(7)

此时,选取3倍中误差作为限差,进行粗差的初步探测。为减少观测数据的粗差对定位结果的影响,两步法误差探测模型采用抗差M估计进行粗差剔除[18]。基于构建得到的GPS/BDS函数模型和随机模型,文章首先在伪距单差函数模型的粗差探测基础上计算伪距残差矢量。然后,采用抗差M估计计算得到粗差剔除后的定位结果。
2.3 GPS/BDS开窗自适应滤波动力模型
GPS/BDS自适应滤波动力模型主要是利用当前的伪距观测信息和状态估值更新先验信息和补偿运动方程误差。其中,利用合理的统计量进行自适应是一个关键问题。基于此,文章提出一种开窗自适应滤波的算法,分析得到观测值冗余和观测值不足情况下构造的模型误差判别统计量。具体的模型如下所示:
Xk=φk,k-1Xk-1+Wk
(8)
式中,k表示对应于tk时刻;Xk为tk时刻的m维状态向量;φk,k-1为m×m维状态转移矩阵;Wk为状态噪声向量。tk时刻的观测模型为:
Lk=AkXk+Δk
(9)
式中,Lk为nk维观测向量;Ak为nk×m维设计矩阵;Δk为观测噪声向量。
解向量为:
(10)
(11)
(12)
(13)
(14)
则动态噪声协方差矩阵自适应估计为:
(15)

3 静态模拟实验和实时动态车载实验
文章利用静态数据人为加入粗差的方法对算法可操作性进行改进。同时,设计不同的路段、不同的场景进行车载动态实验,统计分析每次试验的精度指标以及计算速率,进而优化算法模型。
静态模拟实验选择在试验场坐标已知的观测墩上进行测试,人为制造遮挡环境,分析内符合以及外符合精度指标。动态实验主要以车载形式进行,建立和搭建测试车辆以及相应的设备,确定测试的地点,记录测试过程中的环境。为了对建立的模型的定位精度进行分析,放置一台测量型的卫星接收机,接收和记录观测数据。在进行二者比较的时候应该估计到两个天线位置的差别,在精度分析和比较时加以考虑,提高精度分析的合理性。具体的实验流程如图2所示:
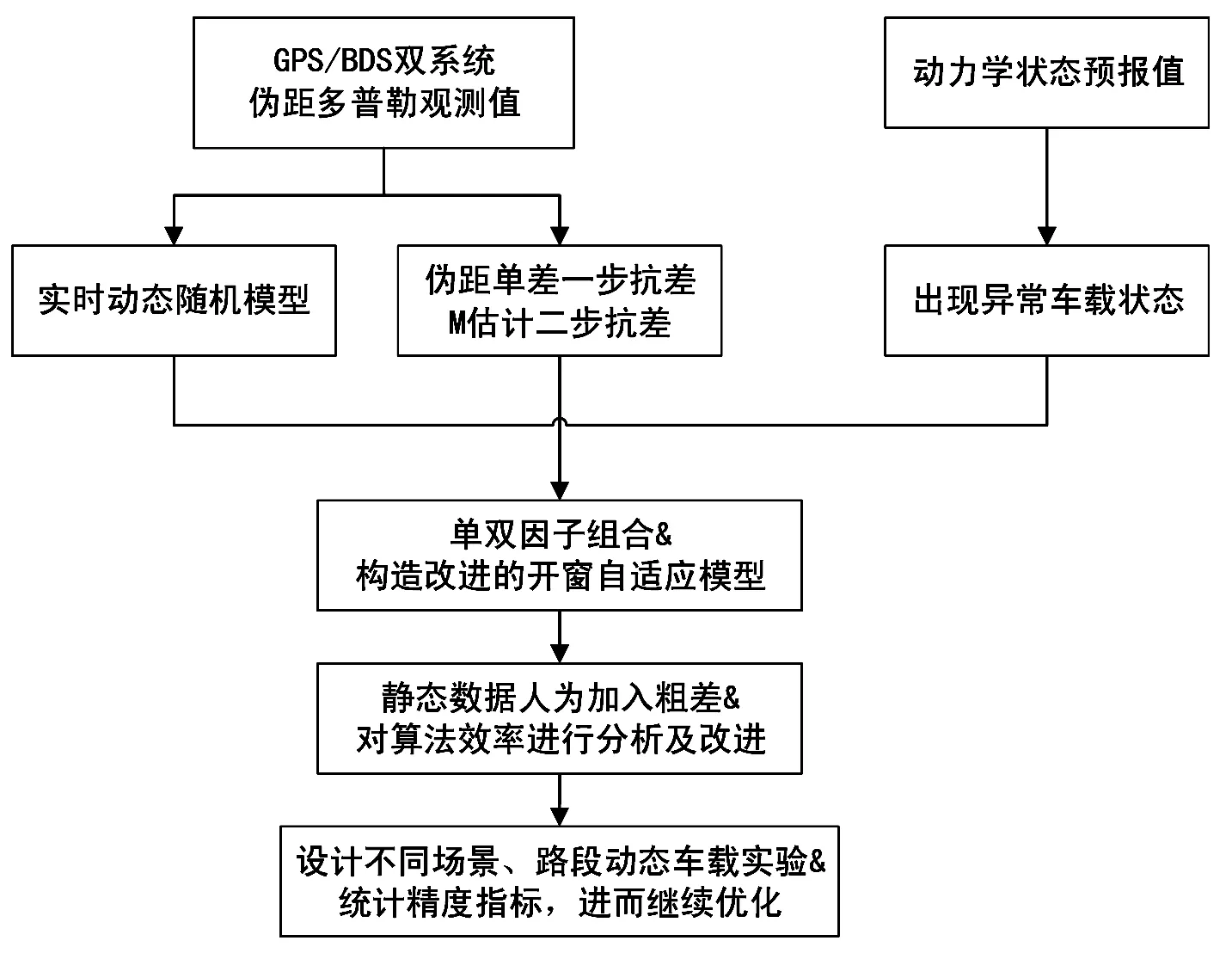
图2 静态模拟实验和实时动态车载实验
实验使用的主要仪器包括:汽车1辆、测量型GPS/BDS RTK接收机1台、全景或广角照相机1台、笔记本计算机1台和测试开发板1个。
4 结语
GPS/BDS两类观测值随机模型构建、导航定位模型误差探测修复和整体动力模型自适应调整是进行GPS/BDS高精度导航定位必须考虑的实际问题。
基于GPS/BDS伪距多普勒观测值的抗差自适应导航定位算法可以实现GPS/BDS高精度动态车载导航。它在城市复杂环境中仍可以实现高精度导航服务,满足公交车辆调度、银行运钞车辆监控等社会需求。同时,它还可以应用在工程建筑变形监测、工程安全预警等不同的领域。
