压电传感器的毫牛级摩擦力测量
2023-01-30任宗金于时恩吕江山苏子健
洪 吉,任宗金,于时恩,吕江山,苏子健
(1. 大连理工大学 机械工程学院,辽宁 大连 116024;2.中国空气动力研究与发展中心,四川 绵阳 510700)
0 引言
飞行器气动外形设计时必须考虑飞行器飞行过程中所受阻力,而飞行器表面摩擦力是阻力的重要组成部分[1-2],减小表面摩擦力有利于降低飞行成本[3-4],快速、精准地测量表面摩擦力将为减阻措施和飞行器的设计指引方向。人们一直在研究毫牛级表面摩阻测试技术,由于飞行器飞行速度快,流场复杂,摩擦力值小,法向干扰大,因而快速准确地测量表面摩阻较难。为此,诸多学者相继开发设计了多种表面摩擦力测量技术。目前关于表面摩擦力的测量技术可分为间接测量法和直接测量法。间接测量法包括油膜法[5-7]和激光多普勒技术[8]等形式。这两者分别通过观测油膜和激光来实现表面摩擦力的间接测量。间接测量法需测量很多物理量,而测量每个物理量时都会产生一定测量误差,故对表面摩阻的测量精度较低。直接测量法主要有压电法和应变法。应变法主要借助应变片的形变实现测量,具有精度高,体积小及温度补偿性能良好的特点。其中弗吉尼亚理工大学[9]、俄罗斯科学院[10]、中国航天空气动力技术研究院[11]相继设计了多种形式的应变式传感器,可实现表面摩擦力的精确测量;压电式传感器主要利用压电材料的压电效应,即通过采集压电晶体表面在应力作用下的电荷累积实现测量,具有灵敏度高,稳定性好及固有频率高等特点。P. Reddeppa等[12]将剪切型压电陶瓷传感器安装在模型内测量表面摩擦力。C.P Goyne等[13]和Tsuru T等[14]进一步研究了压电式摩阻天平技术。与应变传感器相比,压电传感器拥有更好的动态性能,这在风洞气动力测量领域十分重要。
针对风洞实验测量中传感器承担法向压力大、表面摩擦力难以测量的问题,根据飞行器模型表面结构,本文作者设计了一种二维力压电式传感器,建立了传感器受空气压力与表面摩擦力作用的压电晶组受力模型,求解了石英晶片表面感生电荷分布表达式,采取了在晶片上布置多片电极的方式进行解耦计算,最终确立了传感器受多维力作用的反向求解公式[15]。为验证晶片电荷分布模型的正确性和布置多片电极的合理性,进行了晶片表面电荷分布的仿真计算及实施传感器的静动态标定实验。实验表明,传感器具有良好的稳定性,且静动态性能优良,可用于实际的风洞测量研究。
1 传感器的结构组成和理论分析
1.1 传感器的原理结构
为测量飞行器模型表面摩擦力和压力,设计了一种压电式扭矩传感器,测量原理如图1所示。在模型表面下空腔内布置传感器,传感器上盖有一个长为L的力臂长杆,力臂长杆上有一小面积感测头,感测头与模型表面齐平,当表面摩擦力作用在感测头上时,通过长杆的杠杆效应放大为扭矩作用在晶组上,可实现对表面摩擦力的放大测量。传感器的三维结构如图2所示。
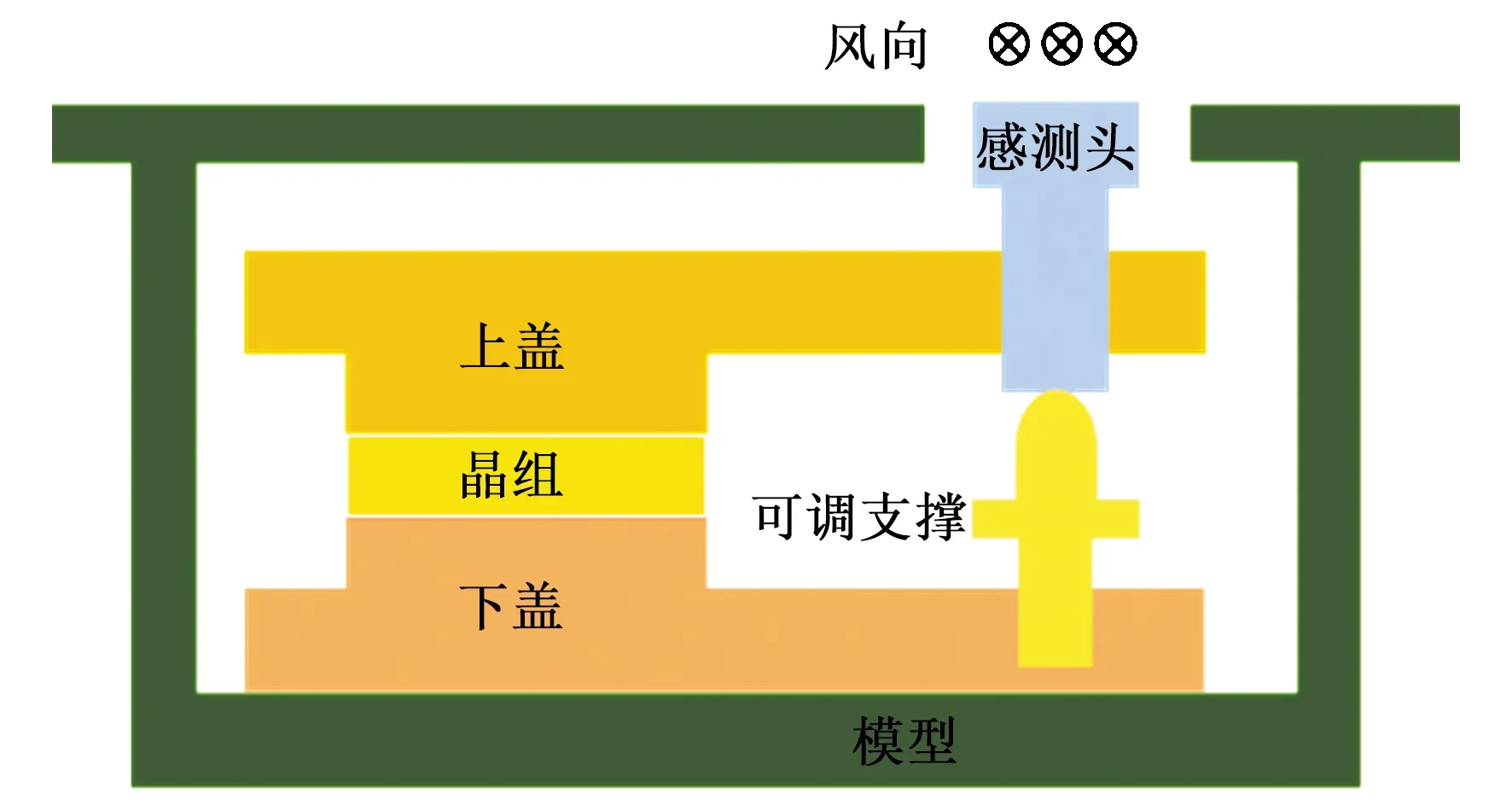
图1 传感器测量原理示意图

图2 传感器三维图
1.2 力学分析
在风洞实验中感测头受到竖直向下的法向空气压力Fz与平行于感测头平面的表面摩擦力Fx作用。经过力的传导,压电传感器晶组受五维力的联合作用,而晶组由X0和Y0切型石英晶片叠加而成,在Fx、Fz作用下石英晶片受力情况如图3所示,其中Oxyz为计算坐标系,与图2中Oxyz坐标系相同,O′x′y′z′为晶体坐标系。

图3 压电石英晶片受力示意图
晶片在受正压力Fx、Fz与扭矩Mx、My和Mz作用下,表面产生应力场为
(1)
1.3 晶片表面感应电荷分析
根据张量坐标变换法则,由晶体坐标系O′x′y′z′中的压电系数矩阵d计算出X0、Y0切型晶片在计算坐标系Oxyz中新的压电系数矩阵dY0和dX0为
(2)

(3)
分别求得两种切型晶体内部的电极化强度P为
(4)
式中T为应力场矩阵。
在垂直于z轴的晶面上,可根据电极化强度P求得电荷密度:
(5)
式中e+=(0,0,1),e-=(0,0,-1)分别为计算坐标系Oxyz中的单位向量。
由式(1)、(4)可知,在扭矩Mz作用下,Y0切型晶片上表面存在以x轴为对称轴且符号相反的电荷分布,将晶片以x轴为分界分别记为S1和S2两个区域,如图4(a)所示。将X0切型晶片上表面记为S3区域,如图4(b)所示。在3个区域上分别贴上电极片用于提取上表面的感应电荷,可知一组Y0和一组X0晶片共有3个电极,组成3路输出二维力传感器。
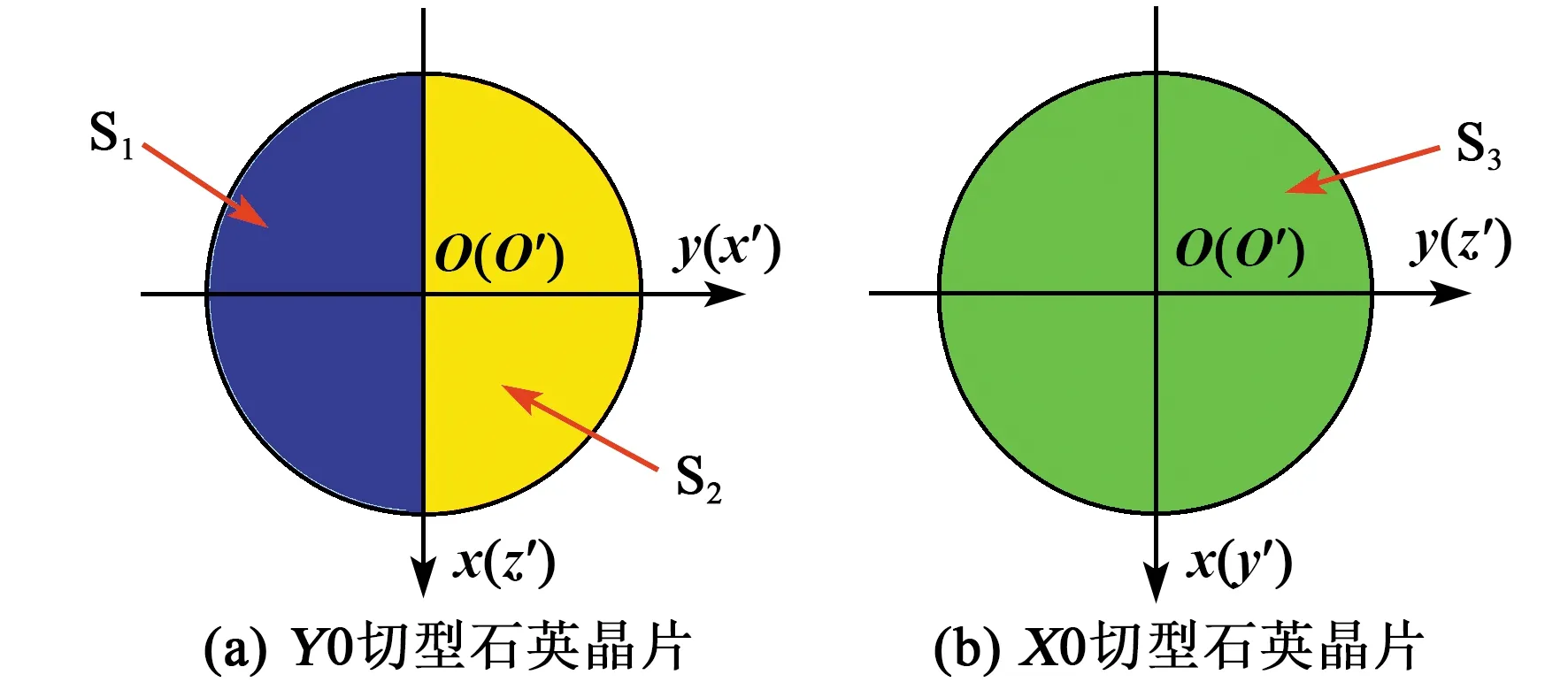
图4 压电石英晶片电极分割示意图
分别对3个面域进行面积分,求得3个面域内的感生电荷量为
(6)
式中:Q1,Q2分别为Y0晶片左右表面产生电荷;Q3为X0晶片全表面产生电荷。
对式(6)进行解耦可得:
(7)
表面摩擦力Fx与Mz的关系为
(8)
式中:Fx为目标测量值;Mz为简化后对Fx的等效测量值;L为固定不变的已知量。
由式(6)~(8)可知,二维力压电传感器能同时实现扭矩Mz和径向力Fz的测量,且Mz和Fz的测量互不干扰。
2 感应电荷分布的仿真验证
根据感应电荷的分布式(6)、(7)可以确定将一个晶面分割成多个电极采集电荷的方式,以实现多维力的测量。为了验证晶片上感应电荷分布公式的正确性,以及分布多个电极测量的合理性,在仿真软件中分别设置X0、Y0切型晶片,进行单维力和多维力分别作用的计算,仿真结果如图5、6所示。装置力臂长杆长度L=32 mm,Fx=50 mN;Fz=10 N;Mz=L×Fx=1 600 mN·mm;Mx=My=1 000 mN·mm。

图5 Y0切型晶片的电荷分布仿真结果

图6 X0切型晶片的电荷分布仿真结果
感应电荷仿真结果如图5、6所示。在多维力作用下,X0、Y0晶片的感应电荷分布情况与理论推导下感应电荷式吻合。其中Y0晶片的感应电荷以x轴为分界线,呈现出对称的反电荷分布,故可采用两个半圆电极布置;在Mx、My作用下X0晶片的电荷呈现出相反电荷对称分布,但在平面内的整体电荷为0,故布置一个圆形电极能够实现Fz的测量。
3 标定装置
标定实验中,微小力加载装置为一种毫牛级电磁力产生装置。该装置基于电磁理论开发设计,通过调节电流大小即可产生稳定可控的毫牛级电磁吸力,分辨力可达微牛级。此装置可通过滑槽及螺栓上下调节,通过滚珠丝杠实现水平方向调节,易拆解,标定方便。作为用来标定传感器的力加载装置,在实验前要先标定该装置,该装置的三维模型如图7所示。

图7 微小力加载装置标定三维图
用于标定加载装置的设备为高精密电子秤,该电子秤的量程为200 g,分辨率为0.000 1 g。将电磁线圈导线接入DP831A电源箱,旋转电流调节旋钮,记录电子秤数据并多次实验,标定结果如图8所示。计算出标定结果的非线性误差和重复性误差分别为0.84%和1.2%。标定装置性能稳定可靠,可用于标定传感器。

图8 微小力产生装置标定曲线
4 标定实验
4.1 静态实验
整个静态标定实验系统包括一台DP831A电源箱、一套微小力产生装置、电荷放大器、数据采集卡、导线若干、砝码一套、DEWESoft软件与二维力压电传感器。静态标定时,将加载装置设置为水平方向,为使力加载装置的电磁力加载在传感器上,在传感器长杆上添加感测头,将感测头朝向电磁线圈,实物图如图9所示。
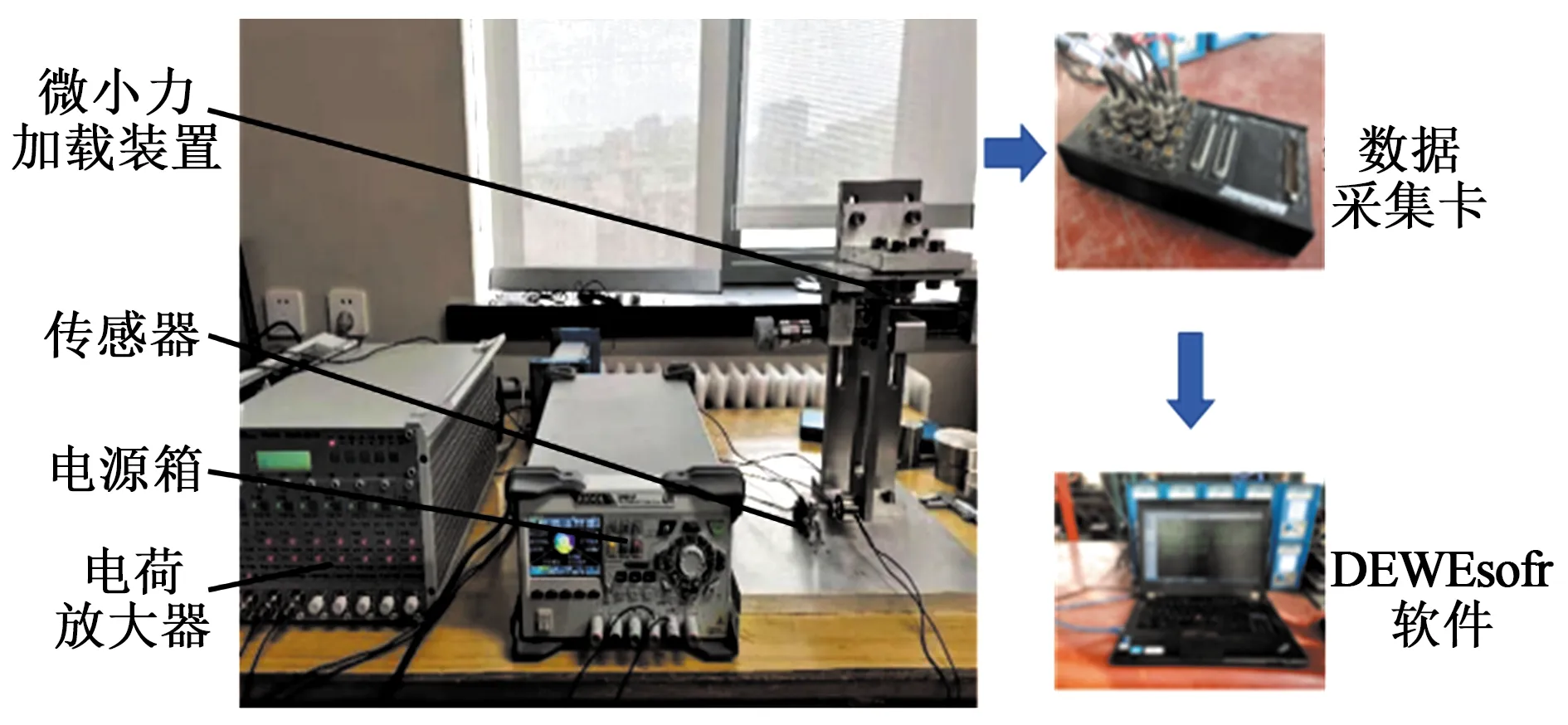
图9 标定实验现场布置图
4.1.1Fx的标定实验
调节加载装置,以10 mN为加载梯度进行加载,重复进行多次实验,以消除随机误差的影响,进行数据处理及曲线拟合,标定曲线如图10所示。

图10 Fx标定曲线
4.1.2Fz的标定实验
竖直方向力的加载利用砝码实现,以10 N、20 N、30 N、40 N进行加载,重复进行多次实验,标定曲线如图11所示。
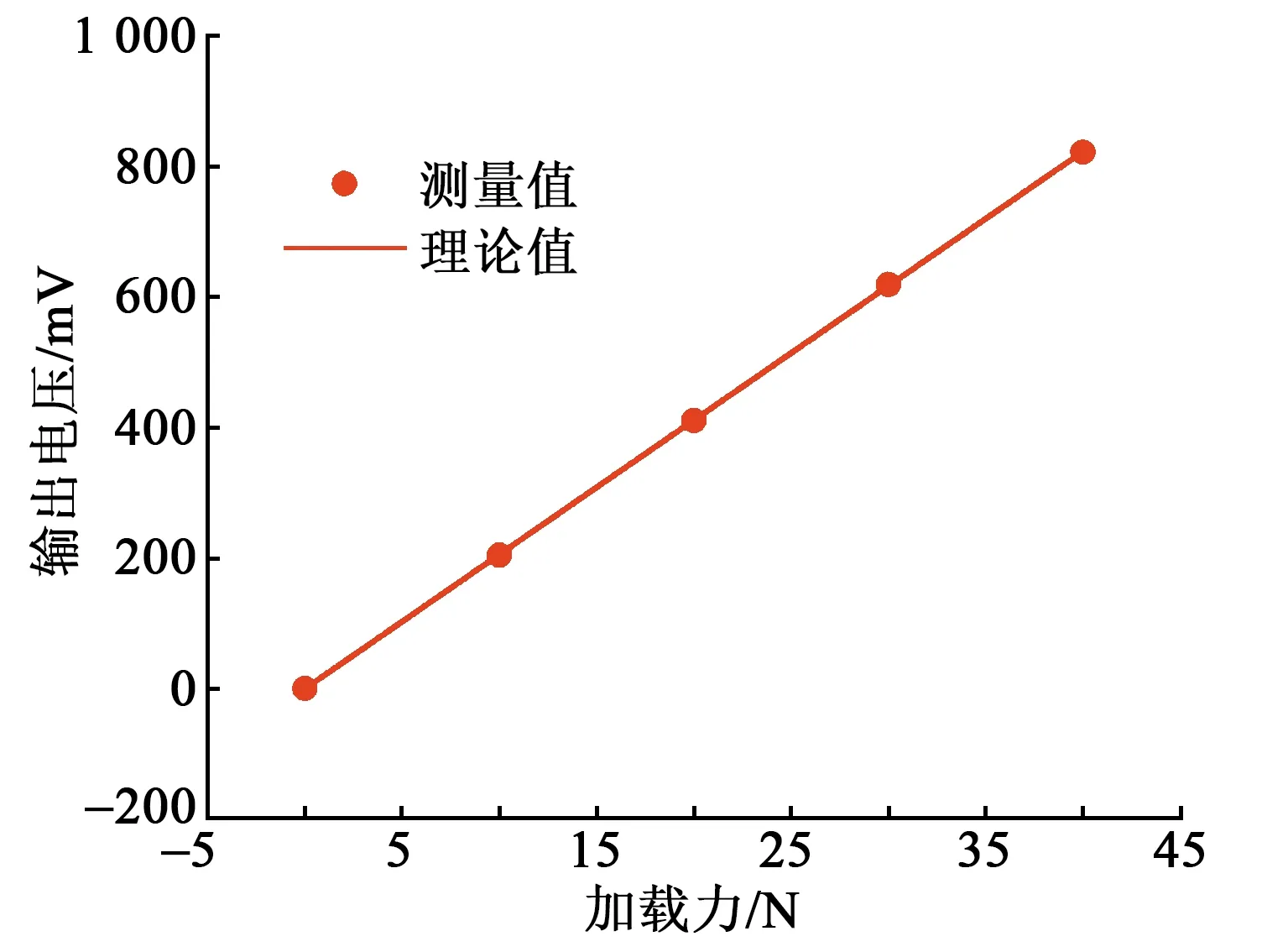
图11 Fz标定曲线
此表面摩阻测量方案中使用的二维力压电传感器用X0、Y0晶片可实现法向力与切向力测量,且产生的向间干扰较小。由图10、11可知,Fx方向的非线性误差为0.51%,重复性误差为0.67%,Fz方向的非线性误差为0.27%,重复性误差为0.93%。实验结果表明,传感器静态性能良好。
4.2 动态脉冲激励实验
风洞实验要求测量系统的固有频率较高,以避免发生共振。本实验采用力锤敲击法进行测量,敲击传感器产生脉冲信号,可得到幅频特性曲线,进而得到其固有频率,如图12所示。由图可看出,设计的二维力压电传感器固有频率为2 428 Hz,大于项目对该系统200 Hz以上一阶固有频率的动态要求。
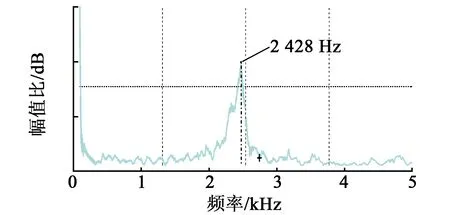
图12 传感器幅频特性曲线
5 结论
针对飞行器表面摩擦力难以测量的问题,本文提出了一种压电式测量方案,并对其展开了理论和实验研究,结论如下:
1) 以毫牛级表面摩擦力为研究对象,设计了一种二维力传感器,实现了表面摩擦力的放大测量,解决了风洞实验测量时存在的法向干扰大等问题。
2) 通过传感器与石英晶片的受力分析,基于压电效应,推导得到了五维力作用下的石英晶片应力场分布和感应电荷分布表达式。
3) 静态标定实验表明该传感器的线性度、重复性误差均满足风洞实验表面摩擦力测试要求;动态脉冲激励实验表明,该传感器具有远高于风洞系统要求的一阶固有频率。
本文设计的压电传感器可用于实际测量,对于风洞实验中飞行器的微小表面摩擦力测量具有重要的参考价值。
