多传感器导航中双天线基线欺骗干扰检测方法
2023-01-29傅金琳赵申卫邓福建
傅金琳,赵申卫,邓福建,王 毅
(1.天津航海仪器研究所,天津 300131;2.中国船舶集团公司航海保障技术实验室,天津 300131)
随着北斗导航系统建设,系统服务能力不断发展,其高精度、误差不随时间积累、实时等优势是其他导航手段不能比拟的,因此其在民用和军用领域得到广泛应用。然而,卫星导航系统信号微弱,容易受到外部有意或无意的干扰。特别对军用卫星导航来说,随着“导航战”的提出,卫星导航接收机面临欺骗干扰的威胁成为共识[1,2]。为此,国内外学者对卫星导航抗欺骗干扰技术进行了广泛深入研究。
常见的欺骗干扰方式主要有产生式欺骗干扰和转发式欺骗干扰两种,而常见的欺骗干扰检测手段主要有基于天线阵列的空域检测[3]、基于接收机自主性检测[4]、基于码和载波多普勒的一致性检测[5,6]、基于惯导/卫导组合滤波残差检测[7,8]、基于载噪比检测方法[9]、以及基于双天线伪距或载波相位的差分检测[10]等。基于天线阵列的空域检测算法需要配置多阵元天线且处理算法复杂;基于接收机自主性检测算法需遍历所有可能情况,计算复杂度高;基于码和载波多普勒的一致性检测受辅助传感器精度或者欺骗干扰影响,效果一般;基于惯导/卫导组合滤波残差检测虽然具有较高的检测灵敏度,但可能受到“引诱型”欺骗干扰,且无法判决卫导接收机何时恢复;基于载噪比的检测方法在距离较远时,效果一般;基于双天线伪距或载波相位检测方法由于检测函数中不同卫星信号的统计特征不完全一致,不易于工程应用。
针对上述问题,本文基于舰船平台多具有两套固定安装卫星导航天线以及其他导航传感器的特点,在双天线伪距双差检测的基础上,进一步推导出双天线基线检测模型,简化检测复杂度。在双天线基线计算过程中,采用多传感器融合导航信息计算每颗卫星与载体之间的视距单位矢量,避免基于卫星导航接收机信息计算单位矢量引入欺骗干扰,从而保证欺骗干扰检测的准确性。
1 伪距计算模型
1.1 接收机接收真实信号伪距计算
当应用场景中不存在欺骗干扰时,GNSS 接收机测量的卫星的伪距主要受到接收机钟差、卫星钟差、电离层以及对流层等影响,第i颗卫星伪距可表示为:

式中,ρ i为第i颗卫星与接收机之间的伪距;ri表示第i颗卫星与接收机之间的真实距离;Δtr表示接收机钟差;Δtis表示第i颗卫星钟差;Δtii、Δtit分别表示第i颗星对应的电离层时延和对流层时延;Δtip表示第i颗星多径效应时延;c表示光速;ε i表示第i颗星测量噪声。
1.2 接收机接收欺骗信号伪距计算
当应用场景中存在转发式欺骗干扰时,要实现欺骗干扰效果,欺骗信号功率需大于真实卫星信号功率,接收机观测到的卫星伪距为欺骗信号对应的伪距。转发式欺骗干扰是转发装置接收到真实卫星信号后,对卫星信号解析并增加同一时延或者不同时延,而后放大信号产生的。即转发欺骗信号的伪距ρis为转发点的伪距ρiu加增加时间延迟产生的伪距Δρi,即:

根据式(1),接收机收到的欺骗干扰信号的伪距ρis表示为:

式中,ris表示转发欺骗干扰位置与卫星之间的真实距离,rsu表示转发装置到接收机的距离。
2 双天线基线欺骗干扰检测模型
2.1 两天线伪距单差计算
由于舰船上两套天线位置距离较近,两天线接收到的信号同为真实信号或欺骗信号。当接收信号为真实对天信号时,两天线接收信号受到的电离层和对流层影响也可认为一致。两天线接收到的为欺骗信号时,两天线接收信号经由的路径为卫星到转发装置,转发装置到天线,对应的电离层、对流层造成的误差也是一样。
当某时刻两天线收到的是真实对天信号时,两天线接收第i颗卫星信号伪距单差为:

式中,上标1 和2 分别代表接收天线1 和接收天线2,其他定义与前文相同。
假设在载体坐标系中,双天线之间的距离基线矢量为b,载体坐标系到地心地固(Earth-Centered Earth-Fixed,ECEF)坐标系的转换矩阵为,天线1与第i颗卫星之间的单位矢量为,由于两天线距离较近,可认为对卫星的单位矢量相同,则伪距单差可重写为:

其中,
式中,[x iy izi]为第i颗卫星的位置坐标,[x Iy IzI]为多导航传感器融合所得的载体在ECEF 下的位置坐标。采用多导航传感器融合所得导航信息,可避免检测结果受到卫导欺骗信号的影响。
当某时刻两天线收到的是欺骗信号时,因为伪距ρis来自同一转发干扰源,两天线接收第i颗卫星信号伪距单差为:

同式(5),可将欺骗干扰应用场景中的伪距单差重写为:

2.2 两天线伪距双差计算
多径主要受到传输路径中的散射物的影响,通过伪距双差能够进一步削弱多径效应的影响,也能削弱接收机钟差的影响。假设选取共视卫星j作为双差对象,当两天线接收的是真实对天信号时,伪距双差可表示为:

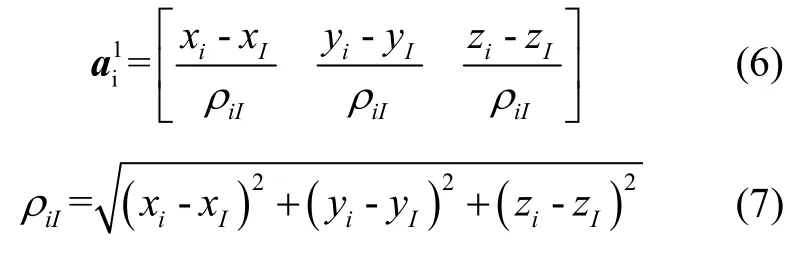
图1 给出了卫星伪距示意图,从图1 中可知,接收对天信号时,不同卫星对天线视距方向的单位矢量是不同的;而接收欺骗信号时,因为伪距ρis、ρjs均来自同一基站,所以不同卫星对天线视距方向的单位矢量是相同的。
图1 卫星伪距示意图Fig.1 Schematic diagram of satellite pseudorange

2.3 两天线基线计算
由式(10)可知,当存在n个共视卫星时,可得到n-1 个伪距双差值,这些值组成一个列向量∇Δρ12,可表示为:

式中,ε12表示对第j颗卫星的伪距双差噪声矢量。假设在ECEF 坐标系中,两天线基线矢量用be表示,则式(12)可以重写为:

根据式(13)可以计算得到be。
2.4 欺骗干扰检测函数构造
欺骗干扰检测函数构建的基本思路是根据真实信号和欺骗信号同一特征的不同统计特性,构建二元统计函数,根据接收机实时接收信号符合的统计特征,判断接收到的是真实信号还是欺骗信号。若接收机钟差和多径效应可以忽略,通过分析伪距单差的统计特性可识别干扰检测。当接收信号为真实信号时,不同卫星伪距单差值不同,如式(5)所示;而当接收信号为欺骗信号时,不同卫星伪距单差相同,如式(9)所示。通过伪距双差构建欺骗干扰检测函数时,对比式(10)和式(11)可知,式(11)符合均值为0 的高斯分布,然而式(10)中不同卫星的均值不一样。基于伪距双差进行欺骗干扰检测时,每颗卫星的统计平均值受到两颗共视卫星视距单位矢量差异的影响,当两颗卫星视距单位矢量差异较小时,可能导致欺骗信号统计特征与真实信号类似,不易区分,并且不同卫星统计平均值不一样,在实际工程应用中也不是很便捷。
本文构造欺骗干扰检测函数为:

式中,Δb为测量两天线基线长度与载体坐标系下两天线固定长度之差,b为载体坐标下两天线基线固定长度。当接收信号为真实信号时,式(14)服从均值为0 的高斯分布。
3 欺骗干扰检测流程
本文欺骗干扰检测流程如图2 所示。

图2 欺骗干扰检测流程图Fig.2 Spoofing interference detection flow chart
从图2 可知,多传感器导航双天线基线欺骗干扰检测步骤为:
a)接收双两天线信号,计算得到伪距ρ;
b)将同一时刻双天线共视卫星伪距做差得到Δρ;
c)选取一颗共视卫星,其他共视卫星与其做双差得到∇Δρ;
d)通过多传感器导航融合信息与卫星星历计算共视卫星视距方向单位矢量a;
e)根据伪距双差∇Δρ、共视卫星视距单位矢量a计算基线长度be;
f)比较计算基线长度与固定计算长度差是否超阈值,若超阈值则存在欺骗干扰,否则不存在欺骗干扰,其中阈值的选取与真实信号下基线精度的统计值相关,在本文中阈值设为2。
4 欺骗干扰检测试验验证
欺骗干扰信号的施加都有一个目的,即造成载体的位置、速度、时间其中一个或多个发生变化,为了达到欺骗效果,目前干扰源都是转发所有可见星的欺骗干扰信号,当欺骗干扰卫星数目少于4 颗时,欺骗干扰效果不可预计,在本文验证试验中,所有可见星都被欺骗。本文针对“突发型”欺骗干扰和“引诱型”欺骗干扰分别进行了试验。本文试验基于卫星信号模拟器开展,试验中采用两套诺瓦泰接收机作为北斗接收机,设置成只接收北斗信号;采用一套诺瓦泰接收机模拟其他传感器导航设备,设置成只接收GPS 信号。欺骗干扰源只播发北斗欺骗干扰。信息融合处理设备接收两套北斗接收机和一套GPS 接收机信息,采用上述欺骗干扰检测方法对欺骗干扰检测,试验图如图3所示。当无欺骗干扰时,输出北斗接收机信息;检测出欺骗干扰时,切换到GPS 接收机输出信息。

图3 对卫星信号模拟器试验图Fig.3 Test diagram with satellite signal simulator
4.1 “突发型”欺骗干扰试验
设置载体以8 m/s 速度东西行驶或静止,首先播发真实信号,当接收机定位后,播发欺骗信号,欺骗信号成功切入后,将导致北斗接收机位置在南向发生0.1 n mile 的突变,试验中,北斗接收机和信息融合设备输出结果如图4-7 所示。从图中可知,北斗接收机受到欺骗后,会存在一小段不稳定状态,当欺骗信号完全切入后,北斗接收机位置被拉偏0.1 n mile,而信息融合处理设备的位置没有拉偏,即当北斗接收机受到“突发型”位置欺骗后,信息融合处理设备的输出能有效切换到GPS 接收机上,表明提出的欺骗干扰方法能有效检测出该干扰。
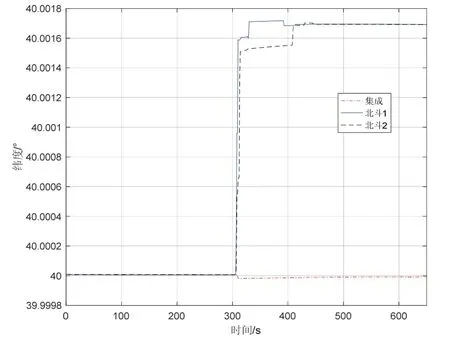
图4 载体8 m/s 匀速直行,“突发型”欺骗干扰下输出纬度Fig.4 Latitude outputs under 'burst' spoofing interference when the carrier runs straight at a constant speed of 8 m/s

图5 载体8 m/s 匀速直行,“突发型”欺骗干扰下输出经度Fig.5 Longitude outputs under 'burst' spoofing interference when the carrier runs straight at a constant speed of 8 m/s

图6 载体静止时,“突发型”欺骗干扰下输出纬度Fig.6 Latitude outputs under 'burst' spoofing interference when the carrier is stationary

图7 载体静止时,“突发型”欺骗干扰下输出经度Fig.7 Longitude outputs under 'burst' spoofing interference when the carrier is stationary
4.2 “引诱型”欺骗干扰试验
设置载体以8 m/s 速度东西行驶或静止,首先播发真实信号,当接收机定位后,播发欺骗信号,欺骗信号成功切入后,将导致北斗接收机位置在南向产生0.2 kn 的速度误差,试验中北斗接收机和信息融合设备输出结果如图8-11 所示。从图中可知,北斗接收机受到欺骗后,直接被拉偏,北斗接收机没有发现任何异常现象,即欺骗干扰实现了对北斗接收机无感欺骗。然而信息融合处理设备的位置没有拉偏,即当北斗接收机受到“引诱型”位置欺骗后,信息融合处理设备的输出能有效切换到GPS 接收机上,表明提出的欺骗干扰方法能有效检测出该干扰。

图8 载体8 m/s 匀速直行,“引诱型”欺骗干扰下输出纬度Fig.8 Latitude outputs under 'induced' spoofing interference when the carrier runs straight at a constant speed of 8 m/s

图9 载体8 m/s 匀速直行,“引诱型”欺骗干扰下输出经度Fig.9 Longitude outputs under ' induced ' spoofing interference when the carrier runs straight at a constant speed of 8 m/s

图10 载体静止时,“引诱型”欺骗干扰下输出纬度Fig.10 Latitude outputs under ' induced ' spoofing interference when the carrier is stationary
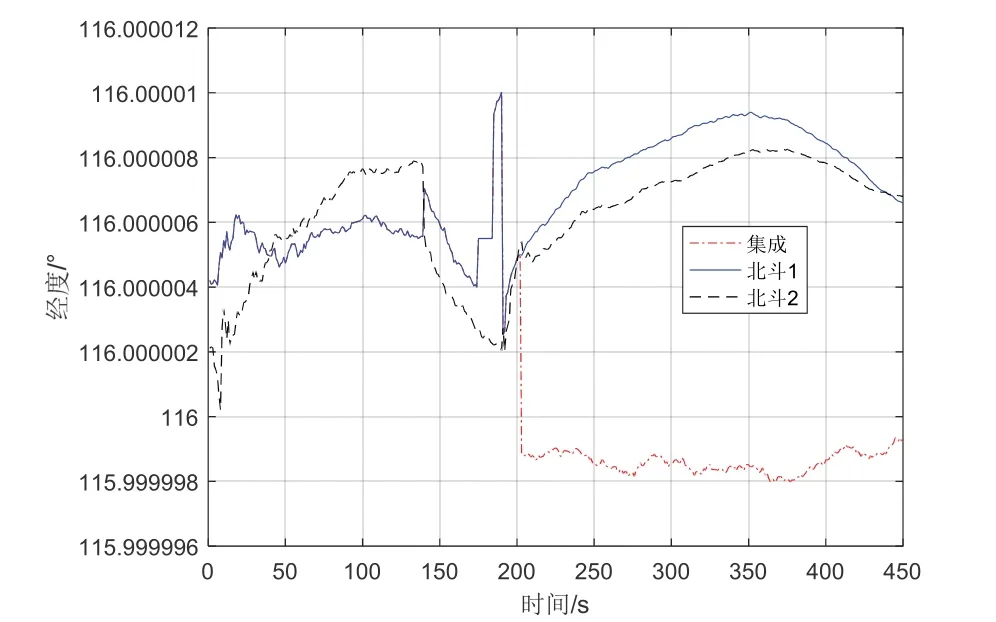
图11 载体静止时,“induced”欺骗干扰下输出经度Fig.11 Longitude outputs under 'burst' spoofing interference when the carrier is stationary
5 结论
本文基于舰船导航设备特点,提出了一种多传感器导航双天线基线欺骗干扰检测方法,该方法通过双天线伪距双差计算双天线基线长度,其与固定基线差值构成欺骗干扰检测函数。从理论上说,只要欺骗干扰为单个欺骗干扰源(由于多个干扰源的干扰效果不好计算,为了达到欺骗效果,目前都是单个欺骗干扰源),任何类型的欺骗干扰模式都能被检测。基于卫星模拟信号和欺骗干扰源测试了提出算法的欺骗干扰检测能力,试验结果表明该方法能够有效检测0.1 n mile的“突发型”欺骗干扰和0.2 kn 的“引诱型”欺骗干扰。该方法无需改变设备硬件状态,只需对设备软件进行升级即可,非常适合工程应用。此外,对于固定基线较长的平台,可以采用伪距双差计算基线;而对于基线较短的平台,如基线长度不足1 m,可以采用载波相位双差计算基线长度。