前斜视SAR成像目标高精度模拟技术
2023-01-17王立权陆戈辉
王立权,陆戈辉,徐 啸,黄 杉,汤 炜
(1.上海机电工程研究所,上海 201109;2.上海航天技术研究院,上海 201109)
为提高雷达全天候的跟踪和打击目标的精度,合成孔径雷达(SAR)成像技术已在主动雷达导引头中得到应用,在面临复杂战场环境下具有较强的自主性[1-2]。SAR 成像体制的雷达具备其他体制难以匹配的高分辨优势,能够与图像识别技术结合,实现目标的精确识别[3]。在SAR 体制的雷达系统设计、算法研究和试验测试与鉴定等领域,系统仿真技术起到越来越重要的作用[4]。
目前,南京航空航天大学等科研院校开展了采用FPGA芯片阵列方式的SAR回波模拟研究[5],采用FPGA调制的SAR成像回波具有较好的实时性,但其在实现强距离徙动的前斜视SAR成像回波模拟时,距离调制分辨率较低;同时,对于大幅宽(多散射点)SAR场景模拟,需要多片FPGA阵列协同计算才能完成[6]。对于高机动的前斜视SAR雷达目标模拟,距离模拟精度对成像效果影响突出,对模拟精度的量化分析也就尤为重要。
本文对前斜视SAR回波模拟精度对成像效果的影响进行了理论分析,研究回波幅度特性,提取距离徙动误差对成像质量的影响因子,通过频域插值升采样处理,提高距离模拟分辨率;同时采用GPU并行处理,实现了前斜视SAR成像目标回波高精度模拟和试验验证。
1 原理分析
1.1 前斜视SAR成像回波
在SAR 成像回波信号模拟中,一方面计算雷达与目标的相位关系,生成多普勒相位函数;另一方面分析距离徙动,分析方位向回波信号沿距离向出现的偏移[7]。前斜视SAR模拟的目标场景可以看作是由分布在矩形网格交点上的大量点目标组成[8],整个场景的回波信号即为各个点目标回波信号的相干叠加。采用一维频域法[4]进行回波仿真,为对该方法进行说明,首先给出在某个脉冲时刻,目标到导引头天线相位中心和目标场景斜平面的关系,如图1所示。

图1 SAR回波场景模型示意图Fig.1 Schematic diagram of SAR echo scene model
图1中,Re1,Re2分别表示相邻两条等弧线到导引头天线相位中心的斜距,Rm为该等弧带中心到导引头天线相位中心的斜距。该等弧带状区域里有N个目标,在某脉冲时刻到导引头天线相位中心的斜距分别为R1,R2,…,RN。设该等弧带状区域里的所有目标到导引头天线相位中心的斜距为Rm,则可在该等弧带中心叠加所有目标的复散射系数[6]。在该等弧带状区域中,单个回波信号可以表示为

利用该等弧带的中心斜距Rm代替各目标斜距,对多普勒相位项的近似进行补偿[9]。于是,在该等弧带状区域中,单脉冲的回波信号可以表示为

式(2)中,σd=
设整个场景可以划分为D个等弧带,则在某脉冲时刻,整个目标场景的回波信号可以表示为

式(3)中,Rdm表示第d个等弧带中心的斜距,σd表示第d个等弧带内所有目标的回波幅度信息和多普勒相位补偿的叠加。τd=2Rdm/c为第d个等弧带中心的目标回波延迟。式(3)中只有前两项与时间变量t有关,因此,式(3)可以写成卷积形式,即



由于前斜视SAR 多为大前斜成像,令波束最小斜距为r,则式(4)可以分解为
则第n个PRT的回波模型可简化为

式(5)中

其中,p(t)表示发射信号,h(t,n)表示第n个PRT 时的场景冲激响应序列。
由式(6)可以看出,除了与正侧成像方式有关以外,前斜视SAR 有较大的向站运动分量,而实际模拟回波时,r(n)的分辨率通常与模拟设备工作时钟或采样率相关,即

其中,rmin为距离模拟分辨率,N为正整数。
1.2 成像结果与模拟精度分析
由上述模型可以看出,相位是连续的,但是距离的调制是离散化的,这就导致距离和相位在一定程度上是失配的。模拟设备的距离分辨率会对成像结果造成影响,以单个散射点为例,其回波模型的式(6)可以简化为
由式(8)可知,当弹目距离的变化小于rmin时,其回波包络形状及位置并未发生变化,仅对相位进行了调制。将包络的运动特征提取后,真实回波可以等效为

其中,H(n)表征匹配滤波后信号的幅度随弹目距离移动的变化情况。而近似模型的匹配滤波过程等效为

由式(10)可以看出,近似模型在距离变化小于rmin时,其匹配滤波后信号幅度恒定。当进行SAR 成像处理时,需要对上述回波信号进行连续距离徙动矫正。徙动矫正的过程,可以理解为对包络运动带来的幅度影响消除的过程,对H(n)进行补偿,因此,需要进行距离徙动模拟补偿,其结果如下:

其包络依然存在规律性的调制A(n)。为了能够更加清晰地描述,设信号带宽为B,分别按照1~4 倍采样率以及真实回波对应的距离分辨率调制精度对A(n)进行分析,其曲线形状如图2所示。

图2 不同距离分辨率调制下,徙动矫正后的幅度调制曲线Fig.2 The amplitude modulation curve after migration correction at different distance resolutions
由图2可知,A(n)受调制距离分辨率的影响,调制距离分辨率越小,A(n)的幅度起伏越低。函数A(n)的调制会导致方位向成像(FFT 过程)处理出现分裂,即最终成像结果出现多余像素点,影响成像质量。因此,式(11)的卷积采用频域插值傅里叶变换的方式提高采样率,然后通过相乘和反傅里叶变换处理提高距离调制精度,变换方式可表示为

1.3 仿真对比
为了能够利用近似模型对SAR 回波进行仿真,需要对模拟设备的距离分辨率指标进行评估,从而求得满足成像要求的距离分辨力参数。接下来以单点方位向成像结果进行仿真,并分析其方位向成像结果。设弹目距离为8 km,速度为200 m/s,重复周期为80 μs,带宽为360 MHz。雷达观测到的目标回波,其模拟模型与真实模型在距离徙动矫正后的峰值幅度和相位变化如图3所示。

图3 徙动矫正后的幅度相位对比Fig.3 Amplitude phase comparison after migration correction
图3可以明显看出,距离徙动矫正后,幅度存在较大起伏,相位的波动较小,在1°以内,证明上述理论分析结果的正确性。接下来,为了能够表征幅度变化对成像的影响,分别对ΔR=0.83 m,0.42 m,0.21 m,0.11 m进行方位向成像分析,结果如图4所示。

图4 不同距离分辨率下的方位向成像结果Fig.4 Azimuth imaging results at different distance resolutions
由图4可知,针对上述波形,为了保证成像质量,其模拟系统距离分辨率必须≤0.11 m,即距离模拟分辨力必须满足4倍带宽的要求。
2 硬件实现
采用FPGA 调制的模拟系统其基带采样率约为信号带宽的1.25 倍(考虑滤波过渡带的设计),若采用4倍带宽的采样率进行设计,对于传统模拟系统,其计算量为原有采样率的16 倍,甚至更高,这种计算量对模拟系统的资源消耗是巨大的。
按照前斜视SAR 场景(256×256点)回波的模拟进行评估,若要满足上述距离分辨率的要求,需要卷积序列长度≥8192 点。同时,若采用FPGA 来实现,需要8路以上的并行处理,进一步增加了其资源消耗。按照每个FPGA 约有5000 个乘法器来计算,系统需十余片FPGA 协同工作才能够满足条件,极大地增加了建设成本及调试难度。针对上述情况,设计了基于GPU 的SAR回波模拟系统,其功能原理组成如图5所示。

图5 模拟系统功能原理组成框图Fig5 Diagram of the functional principle composition of the analog system
GPU 主要用于信号处理和场景解算,其相比FPGA 具备更高速的数据运算能力。其核心处理流程如图6所示。

图6 算法处理流程Fig.6 Flow chart of algorithmic processing
将算法集成在单片GPU 内,能够同时实现场景解析及矩阵点乘运算,并且其计算精度为Double 型,提高了相位运算精度,为后续毫米波导引头的成像质量提供保障。
GPU并行优化策略为,使用CUDA编程对GPU及其内存进行控制,调用CUDA的kernel(内核)函数在GPU上执行并行运算,以散射点斜距计算为例,假设数据量为256×256次的斜距运算,kernel函数为每个点的斜距运算。设置Block大小为一维256,Gird大小为一维256,则创建的thread个数为256×256,每个thread执行一次kernel函数完成所有斜距运算。对于不同的thread来说,线程内通过唯一的thread ID约束每个线程处理的斜距运算的数据源地址及目的地址,源地址和目的地址互不干扰,启动kernel函数后,所有thread并发执行,快速运算256×256点的斜距。按照上述框架,单片GPU能够在8.6 μs内完成65536点数的场景计算。
3 试验结果及分析
为了验证系统满足实时性及成像能力试验要求,搭建记录设备,采集记录模拟器输出信号,对记录回波信号进行成像分析。试验过程中,为模拟弹道不确定性,模拟器无预先航迹导入,所有轨迹信息均来源于实时仿真机设备。
雷达与目标距离为15 km,飞行速度为250 m/s,前斜角为65°,雷达重复周期为100 μs,信号带宽为300 MHz,脉宽为15 μs,场景散射点数为256×256 点。采用V7系列FPGA芯片进行解算能够实现不少于8个点的并行计算,当处理时钟为200 MHz 时,其计算能力能够达到1.6GSa/s,完成65536 点的参数解算所需时间约为40.1 μs。采用单片GPU(Nvidia V100)处理,能够在8.6 μs内完成65536点数的场景计算。
采用传统的FPGA时钟计数延时调制方式,其距离调制分辨率仅0.83 m,模拟距离调制分辨率大于成像距离分辨率,导致对模拟的SAR回波信号利用距离-多普勒算法(RD算法)[10]成像后出现镜像,如图7所示。

图7 FPGA延时粗调成像结果Fig.7 FPGA time-lapse coarse imaging results
图7中,明显存在像的分裂和镜像。采用GPU 升采样运算处理后,其距离调制分辨率达到0.1 m,利用距离-多普勒算法(RD算法)[10]对通过精细化时延调制的SAR 回波仿真信号进行成像后,镜像现象消失,如图8所示。
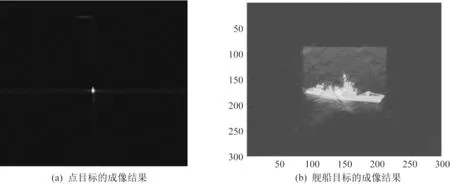
图8 GPU精细化延时调制成像结果Fig.8 GPU-refined time-lapse modulation imaging results
4 结 论
对于非匀速直线运动的弹载平台SAR 回波模拟,本文给出了前斜视SAR 回波模拟系统设计架构及实现优化方案。提出了基于GPU 进行信号处理的大容量数据处理解决方法,并论证了满足成像质量的情况下,系统应该具有的采样率及距离模拟精度。同时搭建前斜视SAR 回波模拟的半实物仿真系统进行仿真验证,结果验证了该方法的有效性和可行性。