中间法短视距精密三角高程在高层平台沉降监测中的应用
2022-03-08张利来张根山
张利来,张根山
(1.东北石油大学,黑龙江 大庆 163318;2.中国电建集团河北省电力勘测设计研究院有限公司,河北 石家庄 050031)
0 引言
从地面水准点到汽机高层平台监测点之间存在较大高差,当采用二等水准测量时,往返测的多个测站需要经过人来人往又狭窄的楼梯,不但效率低下,而且来往人员还易对测量设备或尺垫造成碰动。如果采用悬挂垂直钢尺与水准仪进行较大高差传递[1],对安全条件要求较高,在施工现场受到诸多限制。而三角高程具有传递高差较大的优点。精密三角高程代替二等水准测量方法在施工、沉降监测、跨河水准测量等多个领域得到应用[2-8]。因此,通过高层平台窗口从地面直接传递三角高程高差是必要的。
在三角高程测量中,对向观测有利于消除气差、球差和大气折光差等,但精度受仪器高和棱镜高误差影响。其中,高低棱镜法对向三角高程测量,不受仪器高和棱镜高测量误差影响[9-10],但需2台精度相同的全站仪,占用了较多资源。相比之下,在精密三角高程基础上,选择中间设站方式,可避免测量仪器高误差,短视距有利于减小误差影响,这样不但精度满足要求,而且简便可行。
1 中间法短视距精密三角高程方法
1.1 测量误差来源及应对措施
测量误差来源有仪器误差、观测误差和外界条件影响等。
1.1.1 仪器误差
仪器误差主要包括仪器制造误差、轴线校正后残余误差、对中杆零点差等。仪器误差中有制造方面因素。对于标称精度相同的全站仪,不同厂家生产的仪器存在差别,不同仪器也有差别,所以增加垂直角测回数,以消弱仪器误差对高差影响。
全站仪虽然经过年检和校正,但是视准轴、横轴、水准管轴和竖轴等轴线仍可能存在残余误差。除了增加垂直角测回数外,使前视、后视斜距相等,以消弱其对高差影响。
为了减弱大气垂直折光影响和对中杆架设稳定,对中杆高度宜架设在1.0~1.5 m,当气泡偏离 3′时,则误差为 1500(1-cos0°3′)=0.001 mm,误差可忽略。所以,在对中杆上端安装气泡精度不低于3′,同时使用全站仪对对中杆垂直度进行校正。
对于精密三角高程,前、后视对中杆采用相同碳纤维材质,高度设置相同,还需消除前、后视对中杆零点差影响。当相邻水准点(或相邻监测点)点间距离较远时,采用偶数测站。当相邻监测点(或两水准点)点间距离很近时,可采用一个测站方式,前、后视使用同一对中杆,以避免零点差影响。
1.1.2 观测误差
观测误差主要包括照准误差、垂直角观测误差、测距误差等。
利用全站仪自动精确整平功能,有效消弱气泡居中误差。
照准误差与人眼分辨率、望远镜放大率、视线长度、目标形状、亮度以及视差影响等有关。垂直角观测误差主要由仪器误差、照准误差以及外界条件等引起。应选择高精度仪器,缩短视距,对光消除视差,增加测回数等来消弱垂直角观测误差。
测距误差主要包括对测距加常数和乘常数测定误差、对温度和气压测定误差以及对中杆不垂直引起的距离误差。选择高精度仪器,适当增加测回数等来消弱测距误差。
1.1.3 外界条件影响
外界条件包括地质条件、温度、气压、风力、地球曲率和大气折光等多种因素影响。
仪器和觇标应架设在水泥地面或坚实的土质上,三脚架拧牢。
为消弱温度变化影响,在室外对仪器应打伞遮阳,或在阴天观测,视线远离高温物体或高压蒸汽等。当前后视环境温差较大时,会对对中杆高度造成影响,采用膨胀系数较小的非金属杆。碳纤维线性膨胀系数为-0.5×10-6,对于1.5 m长度碳纤维对中杆,当前、后视温差 20℃时,误差为1500×(-0.5×10-6)×20=-0.015 mm。可见误差很小,可忽略。
温度和气压变化会影响测距数值,采用合格温度计和气压表精确测定,并对距离进行修正。同时,采用全站仪年检中的加常数和乘常数,对距离进行修正。
当风力较大时,会造成仪器不稳定、对中杆倾斜,导致观测误差增大,应停止观测。
使前视、后视斜距相等,以消除地球曲率对测站高差影响。
大气垂直折光系数与温度、气压和环境等因素相关[10-11]。选择在阴天观测,也可在晴天天气稳定时段或夜间观测,以视线高出地面不低于0.5 m、多测回观测等方式削弱大气垂直折光误差的影响。前后视线越长且视距差越大时,大气折光对高差中误差影响越大[10],当观测距离小于100 m时,大气垂直折光对高差影响在0.01 mm[10]之内。所以使前后视斜距较短且相等。为了减小大气折光系数变化影响,在较短时间内完成后视和前视观测。
1.2 中间法短视距精密三角高程公式及中误差
根据文献[10],单向三角高程公式如下:

式中:h为两点之间高差;S为斜距;α为垂直角;i为仪器高;v为棱镜高;q为地球曲率影响值;f为大气垂直折光影响值。除高山区外,垂线偏差影响很小,可忽略。
当采用中间法方式时,前、后视棱镜高相同,无需考虑仪器高和棱镜高量测误差。
在前后视棱镜高相同、斜距相等情况下,由式(1)可得中间法高差公式如下:

式中:hAB为两点之间高差;S为斜距;α1、α2分别为前、后视的垂直角;R为地球半径。对于单向观测方式的精密三角高程,球差不可忽视。
把式(2)微分后,得高差中误差公式:


式中:mAB为前、后视点间高差中误差;mS为测距中误差;ma为垂直角中误差。当观测距离小于100 m时,球差中误差很小,mR可忽略。
这样,由式(3),得高差中误差公式:

2 工程实例
在某电厂2×300 MW机组建设过程中,要求以二等水准精度对包括12.6 m高层汽机平台等多处建筑物进行沉降监测。合理的建筑方格网布局[12]为沉降监测提供了便利的水准基准点。下面以#1机组为例,对从地面到高层平台测量进行说明。
在图1中,#1汽机高层平台设置了8个沉降监测点J11~J18,在靠近窗口附近设置1个水准点,在汽机间外适当位置设置1个地面水准点,使2个水准点到精密三角高程测站斜距相等。二等水准测量路线从水准基准点经过楼梯到高层汽机平台沉降监测点,精密三角高程测量路线从水准基准点经过高层平台窗口到高层汽机平台沉降监测点,如图1所示。
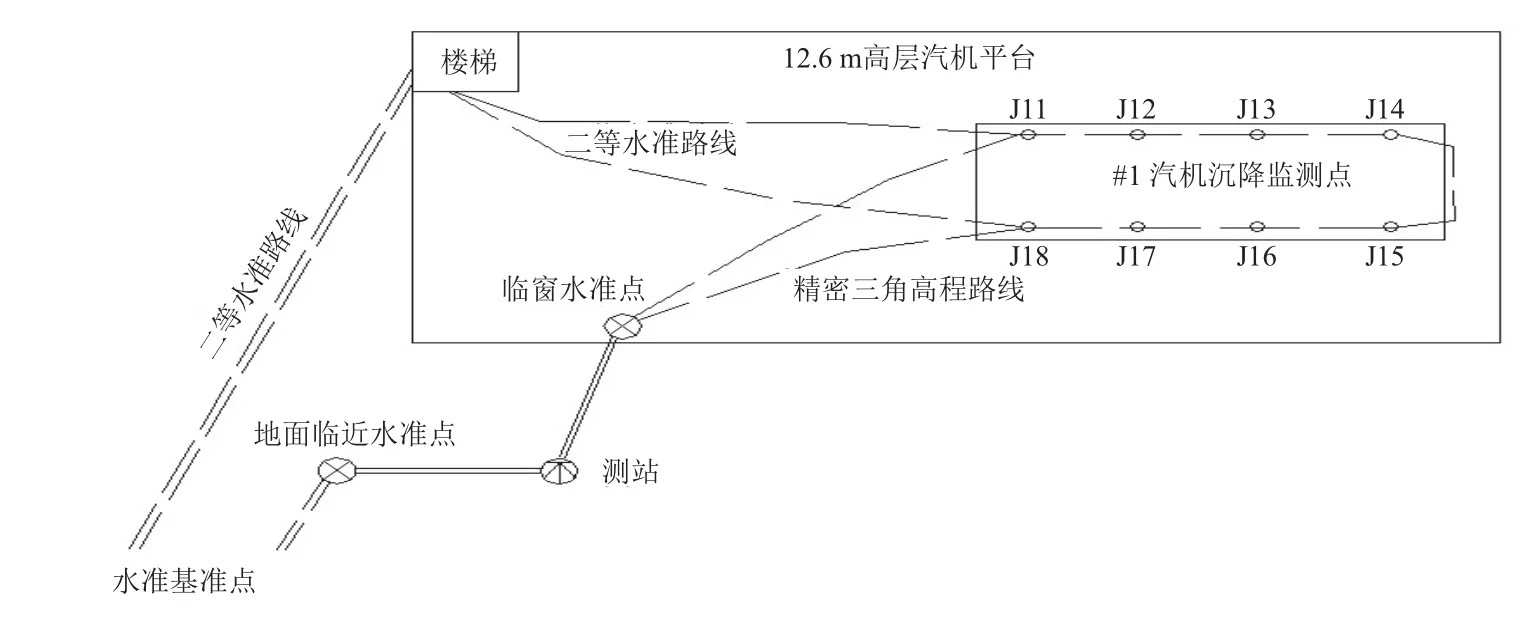
图1 精密三角高程与二等水准测量路线对照图
2.1 地面与高层平台精密三角高程高差中误差估算
2.1.1 精密三角高程高差中误差估算
选择测距标称精度为1 mm+1 mm/km的全站仪。碳纤维对中杆上端安装气泡精度不低于3′。当气泡偏离3′时,对于1.5 m长对中杆,则距离误差为 1500×(1-sin0°3′)=1.31 mm。综合前面两项,则测距中误差取2.0 mm计算。垂直角中误差取1″ 。按照短视距要求,斜距取值30~90 m,前后视斜距相等。以往测为例,测站在地面上,后视为地面临时水准点,垂直角取0°,前视为临窗水准点,垂直角见表1所列。仪器和觇标架设高度大致相等。按式(5)估算测站高差中误差。

表1 地面与高层平台测站高差中误差估算表
根据表1,斜距30~90 m对应的测站高差中误差绝对值如图2所示。
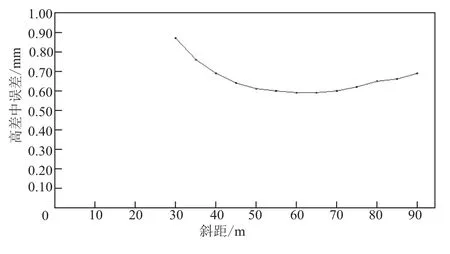
图2 精密三角高程测站高差中误差与斜距关系图
从图2可见,斜距范围为45~80 m时,中误差较小,这时垂直角符合不大于20°的规范要求,距离上可根据施工现场条件有一定的选择区间。
2.1.2 精密三角高程与二等水准高差中误差比较
当选择水准测量时,从地面经过楼梯到12.6 m高层汽机平台,经过3层6个转梯,至少需要6站。按6个测站估算,测站中误差取±0.5 mm,那么,高差中误差为±1.22 mm。从表1和图2可知,斜距在45~80 m,精密三角高程高差中误差均小于±0.7 mm,满足2个二等水准测站的允许误差。所以,精密三角高程代替二等水准,不但便捷,而且精度上也符合要求。
2.2 相邻沉降监测点精密三角高程高差中误差估算
地面与汽机平台之间高差较大,垂直角也较大,适合精密三角高程测量。而相邻沉降监测点间及其他测段比较平坦,高差较小,垂直角也较小,适合二等水准测量。需对精密三角高程测段与二等水准测段适当匹配定权[13],再平差计算,可作为一种方案。
如果对相邻沉降监测点间也进行精密三角高程测量,施测略显繁琐。
对一个测站的前、后视高差假设为0.0 m、0.5 m和1.0 m进行组合,分6种情形讨论。
2.2.1 后视和前视高差都为0.0 m时
仪器和觇标高度相等。斜距取值5~30 m。前后视斜距相等,且取相同垂直角。测距中误差取2.0 mm计算。垂直角中误差取1″ 。按式(5)估算测站高差中误差,见表2所列。
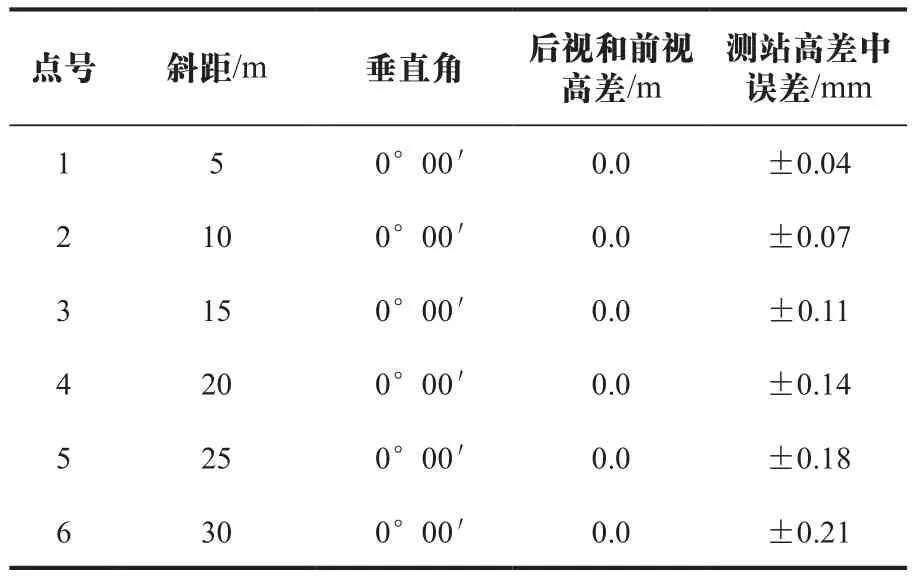
表2 后视和前视高差都为0.0 m时测站高差中误差估算表
从表2可见,当后视、前视斜距为5~30 m时,精密三角高程高差中误差较小,满足相邻沉降监测点高差中误差不大于±0.3 mm要求。根据表2,斜距5~30 m对应的测站高差中误差绝对值如图3所示。
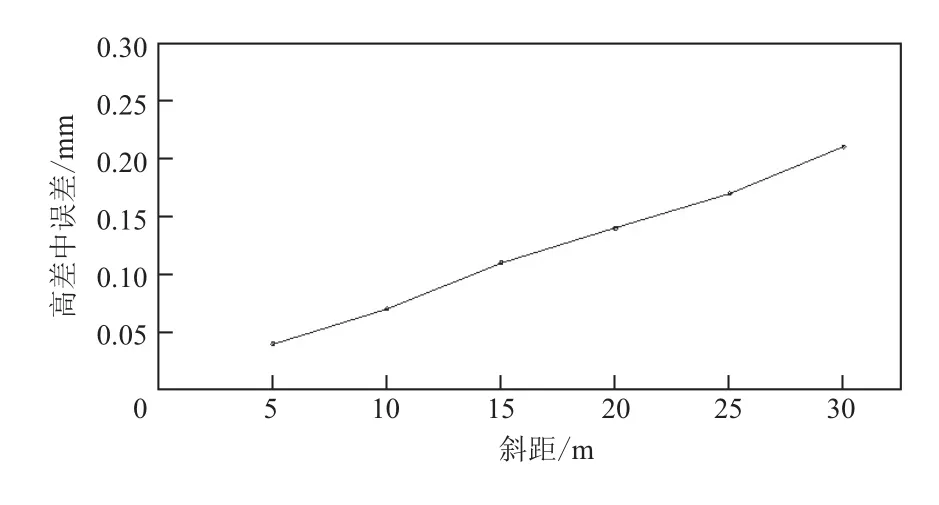
图3 后视和前视高差都为0.0 m时测站高差中误差与斜距关系图
从图3可见,后视、前视斜距为5~30 m时,中误差都满足相邻沉降监测点高差中误差不大于±0.3 mm要求。而中误差具有随着视距变长逐渐增大的特点,选择视距越短,中误差越小,对观测越有利。
2.2.2 后视和前视高差都为0.5 m时
斜距取值5~30 m。仪器和觇标高度相等。前后视斜距相等,且取相同垂直角。测距中误差取2.0 mm计算。垂直角中误差取1″ 。按式(5)估算测站高差中误差,见表3所列。
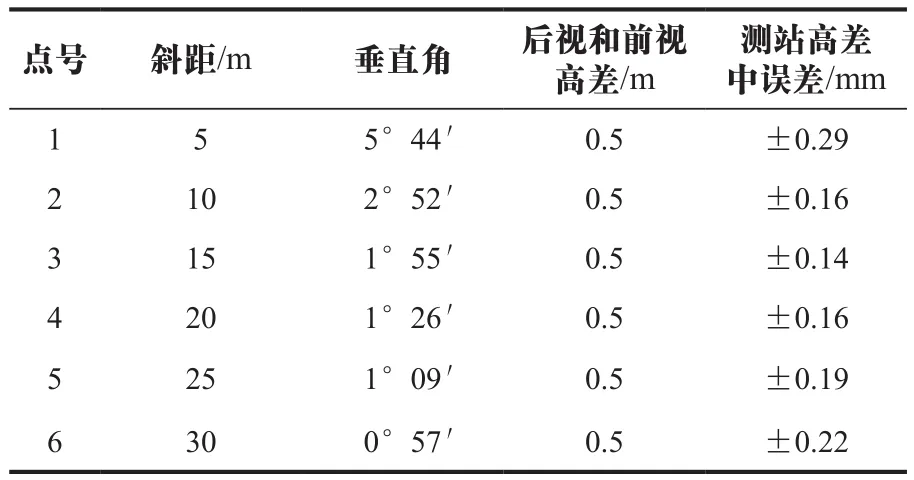
表3 后视和前视高差都为0.5 m时测站高差中误差估算表
从表3可见,当后视、前视斜距为5~30 m时,精密三角高程高差中误差较小,满足相邻沉降监测点高差中误差不大于±0.3 mm要求。根据表3,斜距5~30 m对应的测站高差中误差绝对值如图4所示。

图4 后视和前视高差都为0.5 m时测站高差中误差与斜距关系图
从图4可见,随着监测点高差变大,垂直角随着变大,后视、前视斜距为5~15 m时,中误差绝对值变化显著,斜距为15~30 m时,中误差绝对值变化缓慢。斜距为5~30 m时,中误差都满足相邻沉降监测点高差中误差不大于±0.3 mm要求。中误差具有随着视距变长呈现为U型曲线特点,其中,斜距为10~25 m时,中误差较小,对观测最有利。
2.2.3 后视和前视高差都为1.0 m时
斜距取值5~30 m。仪器和觇标高度相等。前、后视斜距相等,且取相同垂直角。测距中误差取2.0 mm计算。垂直角中误差取1″ 。按式(5)估算测站高差中误差,见表4所列。

表4 后视和前视高差都为1.0 m时测站高差中误差估算表
从表4可见,当斜距小于10 m时,精密三角高程高差中误差较大,不能满足相邻沉降监测点高差中误差不大于±0.3 mm要求。当斜距为10~30 m时,精密三角高程高差中误差较小,满足相邻沉降监测点高差中误差不大于±0.3 mm要求。
根据表4,斜距5~30 m对应的测站高差中误差绝对值如图5所示。

图5 后视和前视高差都为1.0 m时测站高差中误差与斜距关系图
从图5可见,随着监测点高差变大,垂直角随着变大,前、后视斜距为5~15 m时,中误差绝对值变化显著,斜距为15~30 m时,中误差绝对值变化缓慢。中误差具有随着视距变长呈现为L型曲线特点。斜距小于10 m时,中误差较大,不能满足相邻沉降监测点高差中误差不大于±0.3 mm要求。斜距为10~30 m时,中误差较小,满足相邻沉降监测点高差中误差不大于±0.3 mm要求。其中,斜距为15~30 m时,中误差较小,对观测最有利。
2.2.4 后视或前视高差为0.0 m与0.5 m组合时
斜距取值5~30 m。仪器和觇标高度相等。前、后视斜距相等,且取相同垂直角。测距中误差取2.0 mm计算。垂直角中误差取1″ 。按式(5)估算测站高差中误差,见表5所列。

表5 后视或前视高差为0.0 m与0.5 m组合时测站高差中误差估算表
从表5可见,当前、后视斜距为5~30 m时,精密三角高程高差中误差较小,都满足相邻沉降监测点高差中误差不大于±0.3 mm要求。前、后视高差为0.0 m与0.5 m组合比0.5 m与0.5 m组合时,测站高差中误差数值略小。
根据表5,斜距5~30 m对应的测站高差中误差绝对值如图6所示。
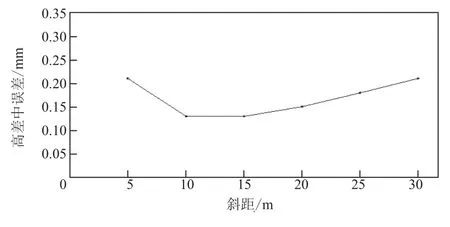
图6 后视或前视高差为0.0 m与0.5 m组合时测站高差中误差与斜距关系图
从图6可见,前、后视斜距范围为5~30 m时,中误差都满足相邻沉降监测点高差中误差不大于±0.3 mm要求。中误差具有随着视距变长呈现为浅U型曲线特点,斜距为9~25 m时,中误差较小,对观测最有利。
2.2.5 后视或前视高差为0.0 m与1.0 m组合时
斜距取值5 m~30 m。仪器和觇标高度相等。前、后视斜距相等,且取相同垂直角。测距中误差取2.0 mm计算。垂直角中误差取1″ 。按式(5)估算测站高差中误差,见表6所列。

表6 后视或前视高差为0.0 m与1.0 m组合时测站高差中误差估算表
从表6可见,当前、后视斜距小于7 m时,精密三角高程高差中误差较大,不能满足相邻沉降监测点高差中误差不大于±0.3 mm要求。当斜距为7~30 m时,精密三角高程高差中误差较小,都满足相邻沉降监测点高差中误差不大于±0.3 mm要求。
根据表6,斜距5~30 m对应的测站高差中误差绝对值如图7所示。
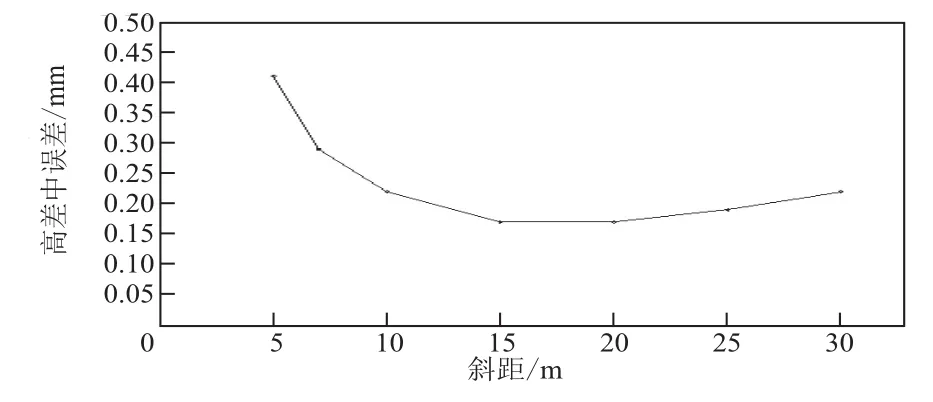
图7 后视或前视高差为0.0 m与1.0 m组合时测站高差中误差与斜距关系图
由图7可见,前、后视斜距小于7 m时,中误差不能满足相邻沉降监测点高差中误差不大于±0.3 mm要求。斜距范围为7~30 m时,中误差都满足相邻沉降监测点高差中误差不大于±0.3 mm要求。斜距小于10 m时,中误差绝对值变化显著,斜距为10~30 m时,中误差绝对值变化缓慢。在斜距为10~30 m时,中误差较小,对观测最有利。
2.2.6 后视或前视高差为0.5 m与1.0 m组合时
斜距取值5~30 m。仪器和觇标高度相等。前、后视斜距相等,且取相同垂直角。测距中误差取2.0 mm计算。垂直角中误差取1″ 。按式(5)估算测站高差中误差,见表7所列。

表7 后视或前视高差为0.5 m与1.0 m组合时测站高差中误差估算表
从表7可见,当前、后视斜距小于8 m时,精密三角高程高差中误差较大,不能满足相邻沉降监测点高差中误差不大于±0.3 mm要求。当斜距为8~30 m时,精密三角高程高差中误差较小,满足相邻沉降监测点高差中误差不大于±0.3 mm要求。
根据表7,斜距5~30 m对应的测站高差中误差绝对值如图8所示。
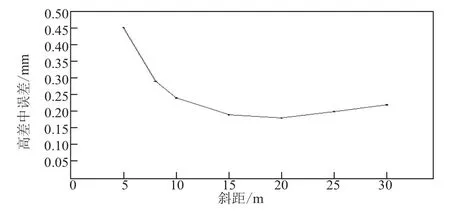
图8 后视或前视高差为0.5 m与1.0 m组合时测站高差中误差与斜距关系图
从图8可见,前、后视斜距小于8 m时,中误差大于±0.3 mm。斜距为8~30 m时,中误差都满足相邻沉降监测点高差中误差不大于±0.3 mm要求。斜距小于10 m时,中误差绝对值变化显著,斜距为10~30 m时,中误差绝对值变化缓慢。其中,斜距为15~25 m时,中误差较小,对观测最有利。
2.2.7 测站高差中误差在不同高差下的特点
前面对一个测站后视和前视高差可能出现的六种情形分别进行了讨论。
实际上,汽机平台比较平坦,相邻沉降监测点一般高差较小,在测站与觇标高度大致相等的条件下,通常一个测站后视、前视高差接近于0.0 m与0.0 m组合,即使0.0 m与0.5 m组合、0.5 m与0.5 m组合出现的也不多。但是,也有可能出现交叉作业,或现场堆放物料遮挡视线,觇标不得不调节高度等特殊情况,为了具有广泛性,对测站后视和前视高差为0.0 m与1.0 m组合、0.5 m与1.0 m组合、1.0 m与1.0 m组合也进行了讨论。对结果总结如下。
1)对于一个测站后视、前视高差为0.0 m与0.0 m组合、0.0 m与0.5 m组合、0.5 m与0.5 m组合,当后视、前视斜距为5~30 m时,测站高差中误差都不大于±0.3 mm,满足相邻沉降监测点高差中误差要求。
2)对于一个测站后视或前视高差0.0 m与1.0 m组合、0.5 m与1.0 m组合、1.0 m与1.0 m组合,当后、前视斜距为10~30 m时,测站高差中误差都不大于±0.3 mm,满足相邻沉降监测点高差中误差要求。所以当后视或前视高差有一项接近1.0 m时,斜距不应小于10 m。
2.3 中间法短视距精密三角高程施测
从汽机间外地面水准点到高层平台临窗水准点,采用中间法精密三角高程传递高差。
选用1″ 级全站仪TC1800,测距标称精度为1 mm+1 ppm/km。碳纤维对中杆上端安装精度3′气泡,当气泡偏离3′时,对于1.5 m长对中杆,则距离误差为 1500×(1-sin0°3′)=1.31 mm。综合前面两项,则测距中误差取2.0 mm计算。垂直角观测了4测回,垂直角互差和指标差互差都小于3″ ,垂直角中误差可达1″ 。前、后视使用相同高度的同一碳纤维对中杆。 往(返)测前、后视各测距2测回,同时进行了温度和气压改正。
根据式(2)进行内业计算,包括球差改正。对实地1站中间法精密三角高程往返测结果及高差中误差见表8~表9所列。

表8 三角高程往测

表9 三角高程返测
从表8、表9可得,往返测三角高程测站高差中误差为±0.60 mm,都小于上(下)楼梯6个测站的二等水准高差中误差(±1.22 mm)。
对于汽机平台上8个相邻沉降监测点J11~J18,采用中间法精密三角高程测量。汽机平台平坦,布置的相邻沉降监测点高差较小。前、后视使用相同高度的同一碳纤维对中杆。在测站与觇标高度大致相等的条件下,相邻沉降监测点间一个测站后视和前视高差接近于0.0 m与0.0 m组合,后视和前视斜距在8~20 m之间,测站高差中误差都不大于±0.3 mm,满足相邻沉降监测点高差中误差要求。
3 结论
对于电厂高层平台,以中间法短视距精密三角高程代替二等水准测量,避开了繁忙又狭窄的楼梯,不必担心来往人员可能碰动水准仪或尺垫。其中,三角高程测站位置选择比较重要,宜提前与项目部联系,了解附近施工机械和作业人员状况,远离作业警戒范围。
对于相邻沉降监测点测段,既可采用二等水准测量,这样二等水准测段需要与精密三角高程测段进行权匹配,也可继续采用中间法短视距精密三角高程方式测量。
工程结果表明,以中间法短视距精密三角高程直接传递高差,代替二等水准测量,在采用较高精度仪器、觇标等适当条件下是可以实现的。不但简便可行,而且精度可以满足规范要求,可为类似的高差较大测段沉降监测工程提供参考。
