山区公路回头曲线车辆横向加速度特性研究
2023-01-14陈钦陈海源王晓辉张晓波徐进
陈钦, 陈海源, 王晓辉, 张晓波, 徐进*
(1.重庆交通大学交通运输学院, 重庆 400074; 2.浙江江南工程管理股份有限公司, 杭州 310000; 3.中铁第四勘察设计院集团有限公司, 武汉 430063)
回头曲线是偏角接近180°或者大于180°的平曲线,是山区低等级公路中比较常见的一种线形。根据《2021年交通运输行业发展统计公报》,截至2021年末,中国三、四级公路里程约占公路总里程的82.1%,山区低等级公路设计往往具有线形组合复杂、曲线较多等特点,易发生车辆驶离路面、侧翻、对撞、撞向护栏或山体等交通事故。
横向加速度是描述曲线路段侧向安全性与行车舒适性的主要指标,同时也是控制平曲线超高率与极限半径的主要参数。近年来,中外学者从不同视角对曲线段开展了实车试验和模拟实验研究,Bella[1]通过安装路侧设施测量轨迹横向位置,分析曲率半径对轨迹偏移的影响。叶亚丽等[2]采集双车道公路小半径曲线段的行车速度建立运行速度-半径模型。张旺等[3]基于无人机航拍车辆在双车道公路行驶情况,分析车辆自然行驶状态下的速度特性。张晓波等[4]在螺旋匝道和环形立交匝道采集车辆行驶速度和横向加速度并研究匝道内车辆行驶的横向加速度变化模式、横向舒适性;另外,蒋生珍等[5]采集双车道公路S形曲线行车轨迹横向偏移量数据,分析公路弯坡组合段行车轨迹特性。García-Ramírez等[6]在双车道山路上采集车辆行驶速度和横向加速度,分析乘客舒适性与横向加速度之间的关系。Othman等[7]采集真实环境下的实车试验数据,分析表明车辆横向加速度受到曲线半径的影响。Xu等[8]在山区双车道公路上采集纵向加速度数据,建立加减速与道路几何特征模型。部分学者应用驾驶模拟器等仿真手段以便能更好地开展研究,袁方等[9]采集模拟驾驶员在双车道公路弯道处的速度和轨迹横向偏移量,分析回旋线长度对行车轨迹的影响。张志清等[10]模拟双车道公路小半径曲线段环境,分析车辆在横向力作用下的横向偏移量和横向加速度变化特性。Wang等[11]模拟含有连续弯道的山区双车道公路环境,研究表明车道宽度和弯道半径对车辆行驶轨迹横向偏移量和横向加速度等驾驶行为有较大影响。Wang等[12]模拟复杂山区高速公路组合线形,建立多元回归模型估计分析组合线形对车辆横向加速度的影响。窦同乐等[13]通过仿真实验得到,在匝道内,车速和匝道半径对横向加速有较大影响。乔建刚等[14]通过模拟软件搭建立交桥出口匝道环境以采集车辆横向加速度,分析了出口匝道的行车安全性。
目前对回头曲线横向加速度的研究也开展了一定的研究,傅龙呈等[15]分析了山区旅游公路回头曲线在低等级公路的平、纵、横设计中的要点和组合要求。徐进等[16-17]、Xu等[18]和邓天民等[19]在含有回头曲线等复杂线形组合的山区公路开展实车试验,根据车辆行驶的横向偏移率曲线分析车辆在自然驾驶状态下的轨迹模式,分析车辆在回头曲线路段的运行轨迹模式、轨迹曲率特性和过弯方式。
综上所述,目前中外的研究主要集中在山区公路一般弯道的横向加速度特性、回头曲线段运行速度特性及轨迹变化模式等方面,由于回头曲线段驾驶数据获取难度较大,对横向加速度的变化特征、变化模式等研究较少。因此现选取重庆市彭水县境内一段含有12个回头曲线段的山区低等级公路为实验对象,开展实车试验,对回头曲线段内车辆的横向加速度进行研究,为事故原因分析、道路设施设计、安全设施设计等方面提供理论依据。
1 试验设计
1.1 试验车辆与仪器
本次试验使用华测导航CGI-610采集车辆关键运行参数,该仪器可以实时提供高精度的载体位置、姿态、速度和传感器等信息。Mobileye630智能防撞预警系统可实现车道线识别和轮迹线测算,输出轮迹线和车道线及路缘线的横向距离。高清数字行车记录仪(SV-MD009HD)主要用于连续拍摄记录道路交通环境和音频情况,实验车辆为别克GL8(商务版,7座),实验仪器如图1所示。
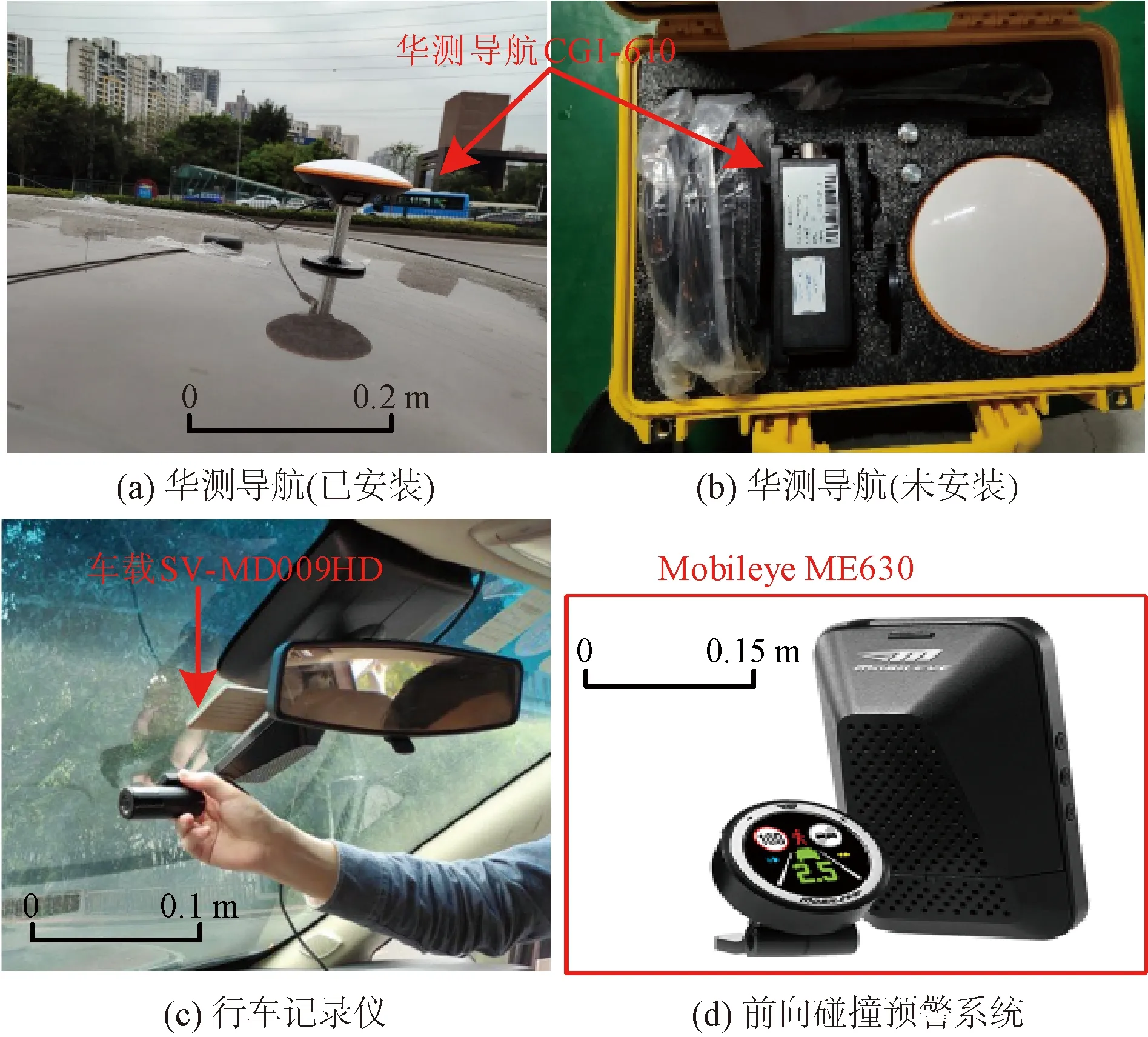
图1 实验仪器设备Fig.1 Experimental equipment
1.2 试验道路以及被试
选取重庆市彭水县境内G211国道中花地弯到大树子村路段为实验道路,该路段为山区四级公路,全长9.7 km,设计车速20 km/h,直线段路面宽度3.25 m,回头曲线范围内有1 m加宽,超高率为5%。该实验路段共有12个回头曲线[图2(a)],路面平整,道路标志清晰,横断面为双向双车道,其中一处回头弯道实景图如图2(b)所示。表1给出了12个回头曲线道路几何参数,其中M1到M12方向是上坡方向,坡度均为同一方向。
由于本次实验路段是复杂线形组合、技术指标低的山区公路,驾驶难度较大,为保证安全,本次实验一共招聘了20名驾驶经验丰富的驾驶员,年龄分布为22~48岁,其中男性驾驶员15名,女性驾驶员5名;驾龄分布为4~30年,平均驾龄11.93年,累积驾驶里程分布在1.8×104~20×104km,平均驾驶里程8.4×104km。
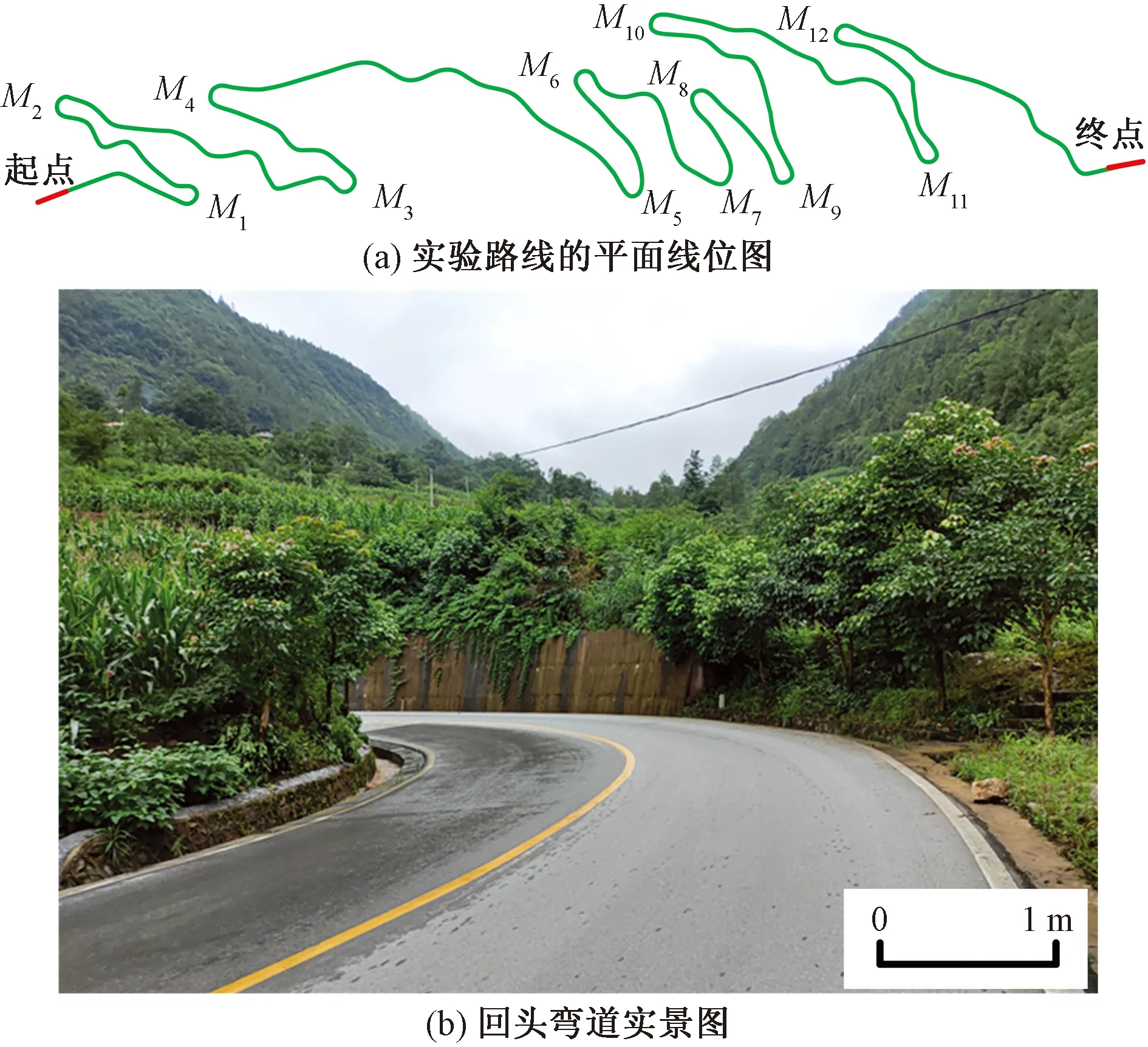
图2 实验道路与实景图Fig.2 Experimental road and real picture
1.3 试验流程和数据处理分析
本次实车试验和数据采集时间集中在8:30—18:00,在试验期间避开了暴雨、狂风等恶劣天气。在实验开始前,统一设定一个起点和终点,每位驾驶员需要按照自己平时的驾驶习惯操纵装有设备的车辆往返一个来回,在车辆返回起点时停止记录数据。原始数据的处理包含数据滤波处理、截取有效数据等,因为数据采集容易受到卫星波动等因素的干扰,导致出现许多“毛刺”,影响后续曲线图的分析,因此运用MATLAB中smooth函数对数据进行 滤波降噪处理。
本文研究中的“有效数据”指的是汽车在12个回头曲线路段连续行驶的数据。在数据处理过程中发现,因检测仪器问题导致20名驾驶员的第2弯道左转横向加速度数据和第10弯道右转横向加速度数据均出现异常,故在下文中不作分析。
2 横向加速度变化特征
图3表示弯道中各个控制点位置和各个控制点具体含义,其中ZH-HY段是入弯阶段,HY-YH段是弯中阶段,YH-HZ段是出弯阶段。在连续行车过程中,车辆左转在道路外侧,右转在内侧,因此右转轨迹半径小于左转轨迹半径。为了能更好地分析回头曲线段的横向加速度的变化特征,只截取每位驾驶员在回头曲线段的αy,αy表示设备输出的横向加速度,左转为“-”,右转为“+”。
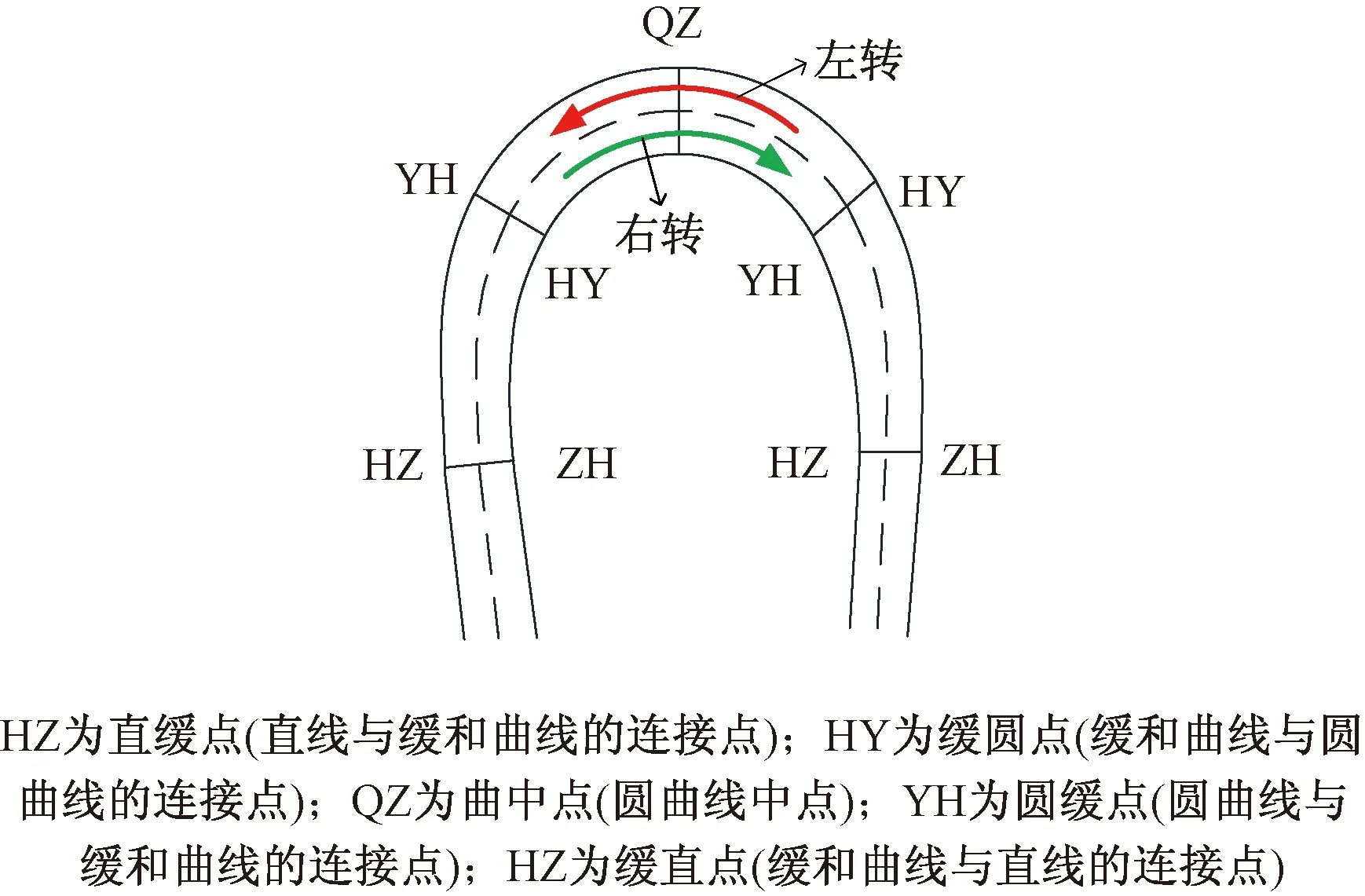
图3 弯道控制点示意图Fig.3 Schematic diagram of curve control points
2.1 总体变化特征
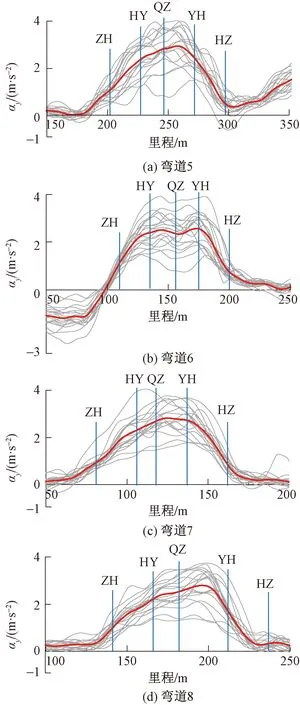
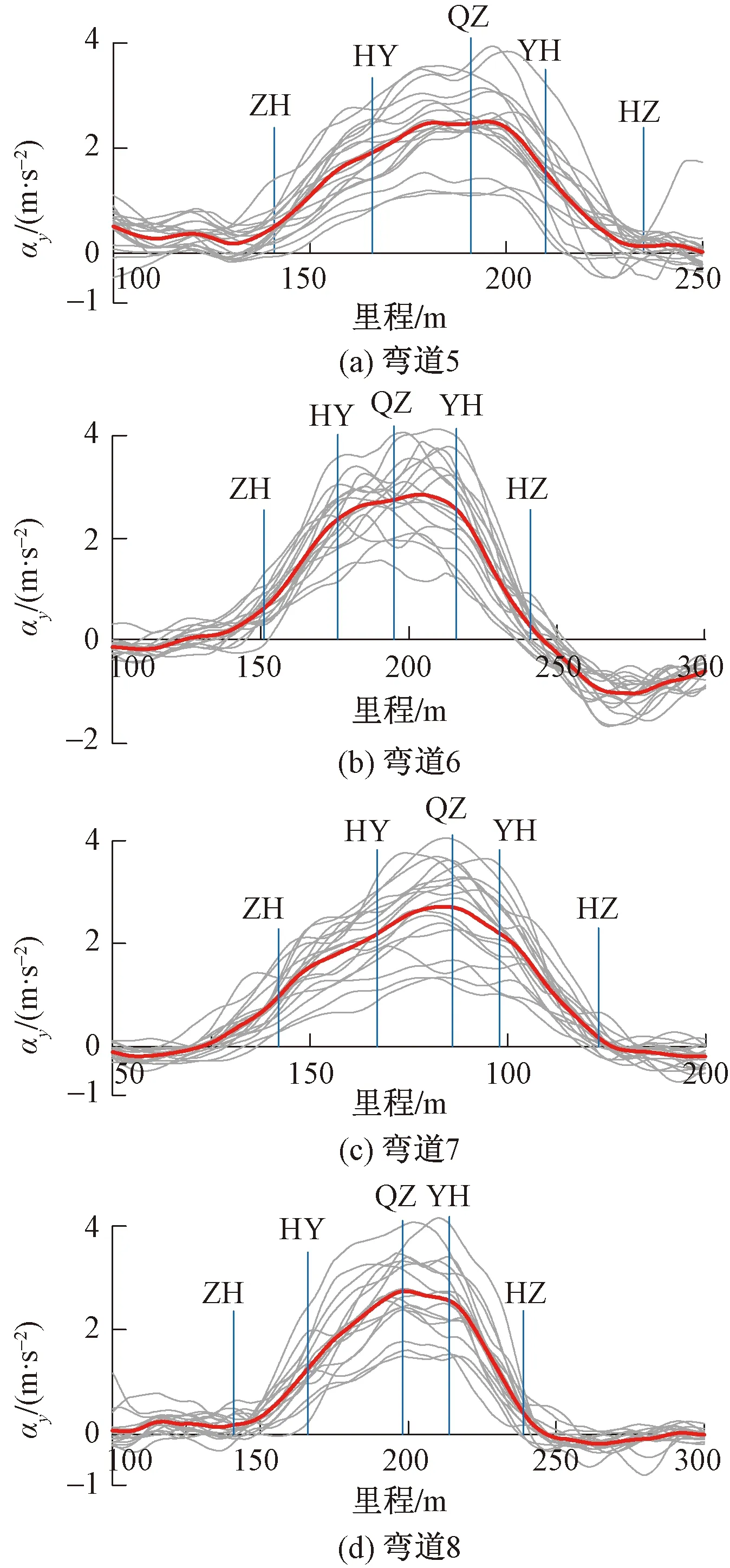
红色曲线表示车辆通过每个弯道时横向加速度的平均值图4 左转横向加速度曲线图Fig.4 Left lateral acceleration curve
逐个提取每处回头弯道的横向加速度数据并绘制随行驶距离变化的曲线图,其中部分弯道的结果如图4和图5所示。观察图4和图5中横向加速度曲线径束、分布和变化趋势,可以看出每个弯道的左、右横向加速度整体变化趋势较为相似,整体呈现出入弯阶段明显增大,弯中阶段相对稳定,出弯阶段明显减小;回头曲线内横向加速度曲线的径束随着横向加速度的变化而变化,在入弯时径束较集中,弯道内径束增大,出弯时径束减小,表明横向加速度在弯道内分布存在明显差异性;相比左转,右转入弯曲线径束更小,说明右转入弯时驾驶员的驾驶行为差异不大;另外,每处弯道的半径几乎一样,而且路面平顺,而图4和图5中弯中横向加速度曲线波动幅度较大,原因可能是道路条件和驾驶环境发生改变导致车辆的行驶速度发生了变化。例如,图6(a)是弯道6中一车辆因车速变化而导致横向加速度变化的示意图,查看行车记录仪后发现是弯中阶段对向车道有行驶车辆[图6(b)],才降低车速以便能以安全车速通过弯道。
2.2 回头曲线横向加速度变化模式
对每处弯道不同驾驶员的横向加速度随里程变化的数据进行同频处理,然后使用Excel软件中的PERCENTILE函数提取每处弯道内左、右转15th、25th、50th、75th以及85th百分位横向加速度特征值并绘制曲线图,如图7和图8所示。通过观察图7和图8,对比每个弯道中15th和85th百分位特征值可以看到,在左转过程中,特征值波动范围较左转偏大,在右转过程中,右转横向加速度的百分位特征值曲线分布更集中,表明过弯过程中轨迹半径对横向加速度有一定影响;对于同一个弯道,左、右转弯道85th百分位特征值的变化趋势存在差异性,如在弯道1的弯中阶段,左转曲线图整体呈先下降再上升的趋势,而右转曲线图呈持续上升趋势,85th百分位特征值曲线在QZ点之后达到最大值,表明大部分驾驶员在弯道内的驾驶行为存在显著差异。
红色曲线表示车辆通过每个弯道时横向加速度的平均值图5 右转横向加速度曲线图Fig.5 Right lateral acceleration curve
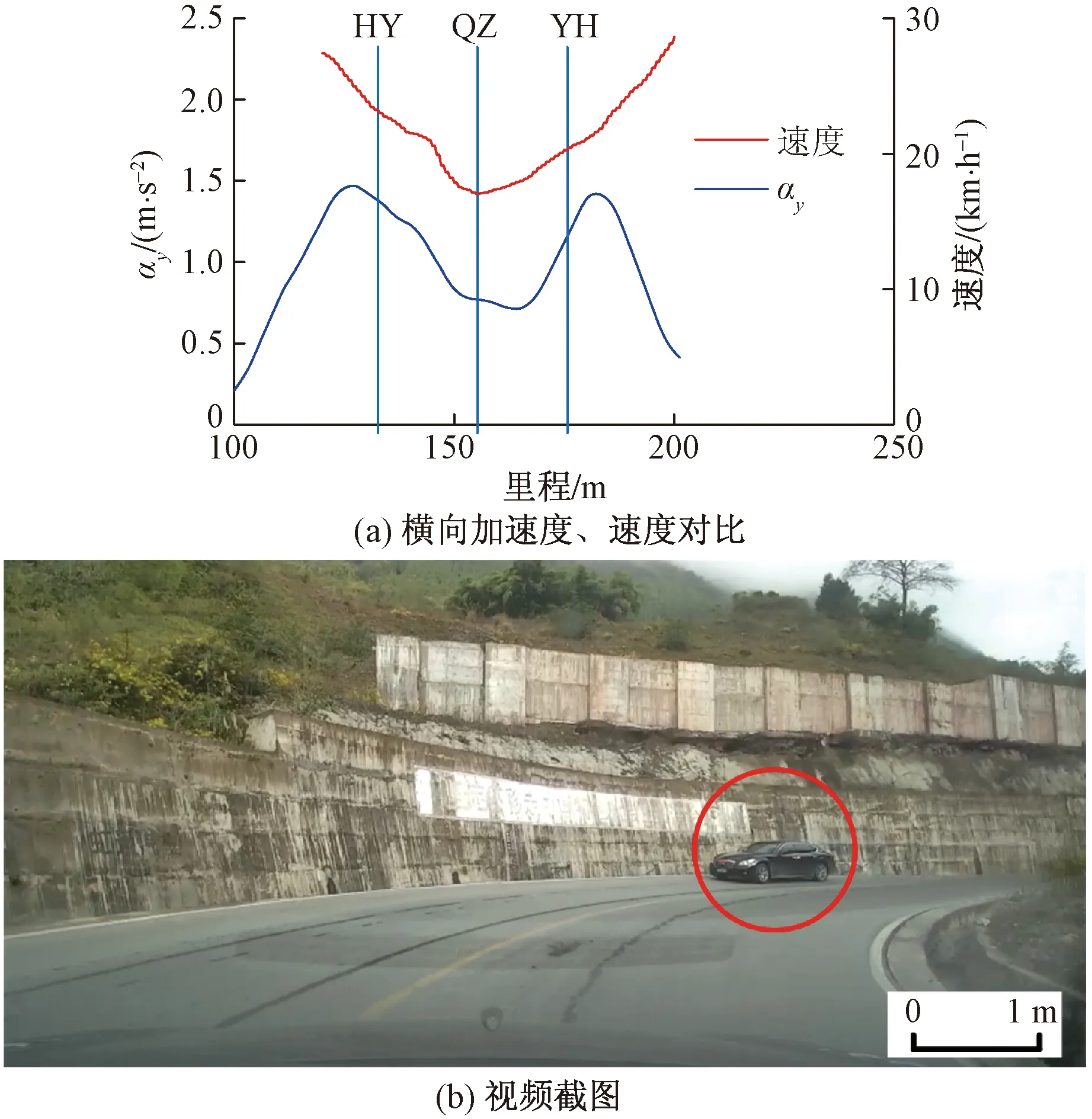
图6 横向加速度异常波动分析Fig.6 Analysis of abnormal fluctuation of lateral acceleration
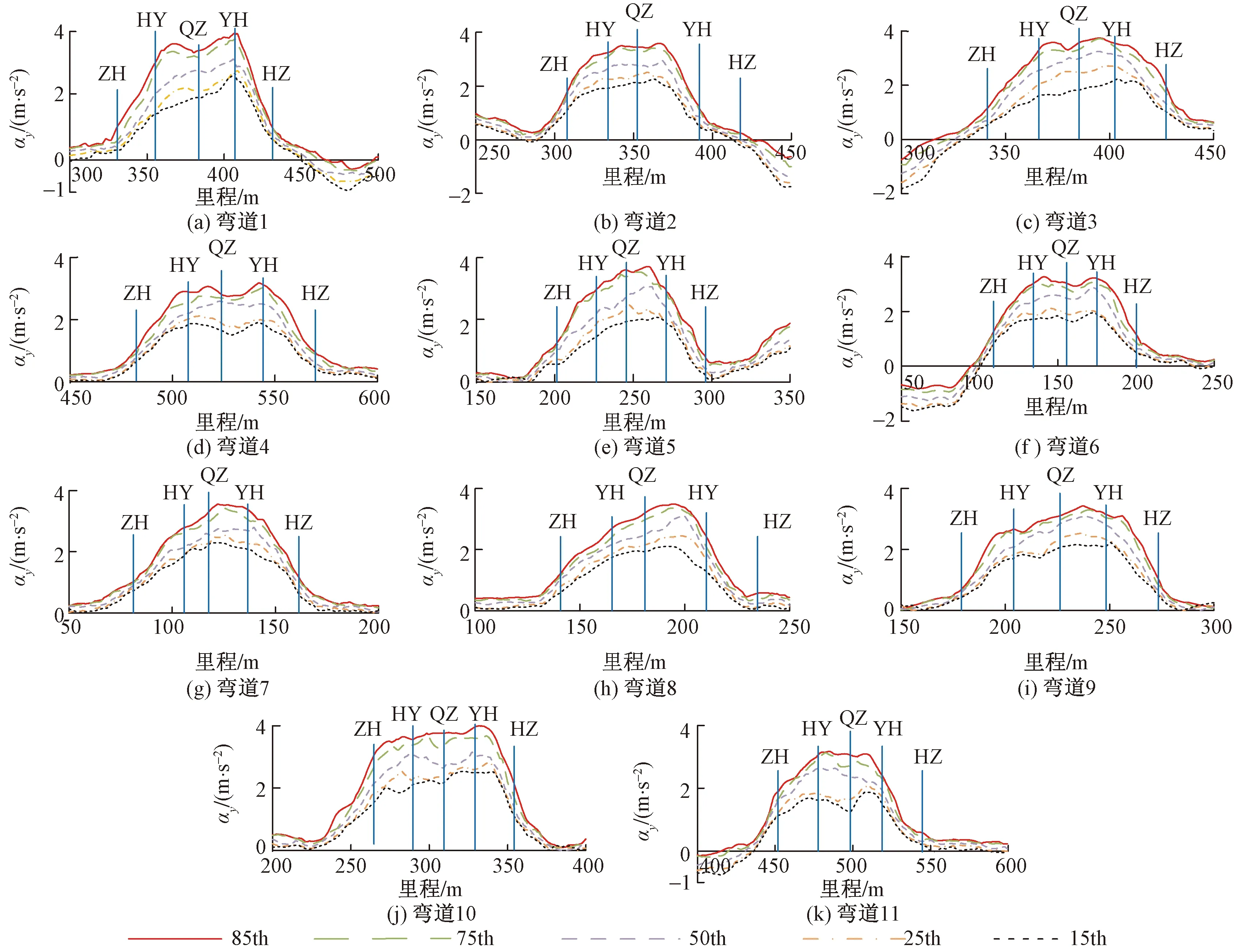
图7 左转横向加速度特征值曲线图Fig.7 Eigenvalue curve of left lateral acceleration
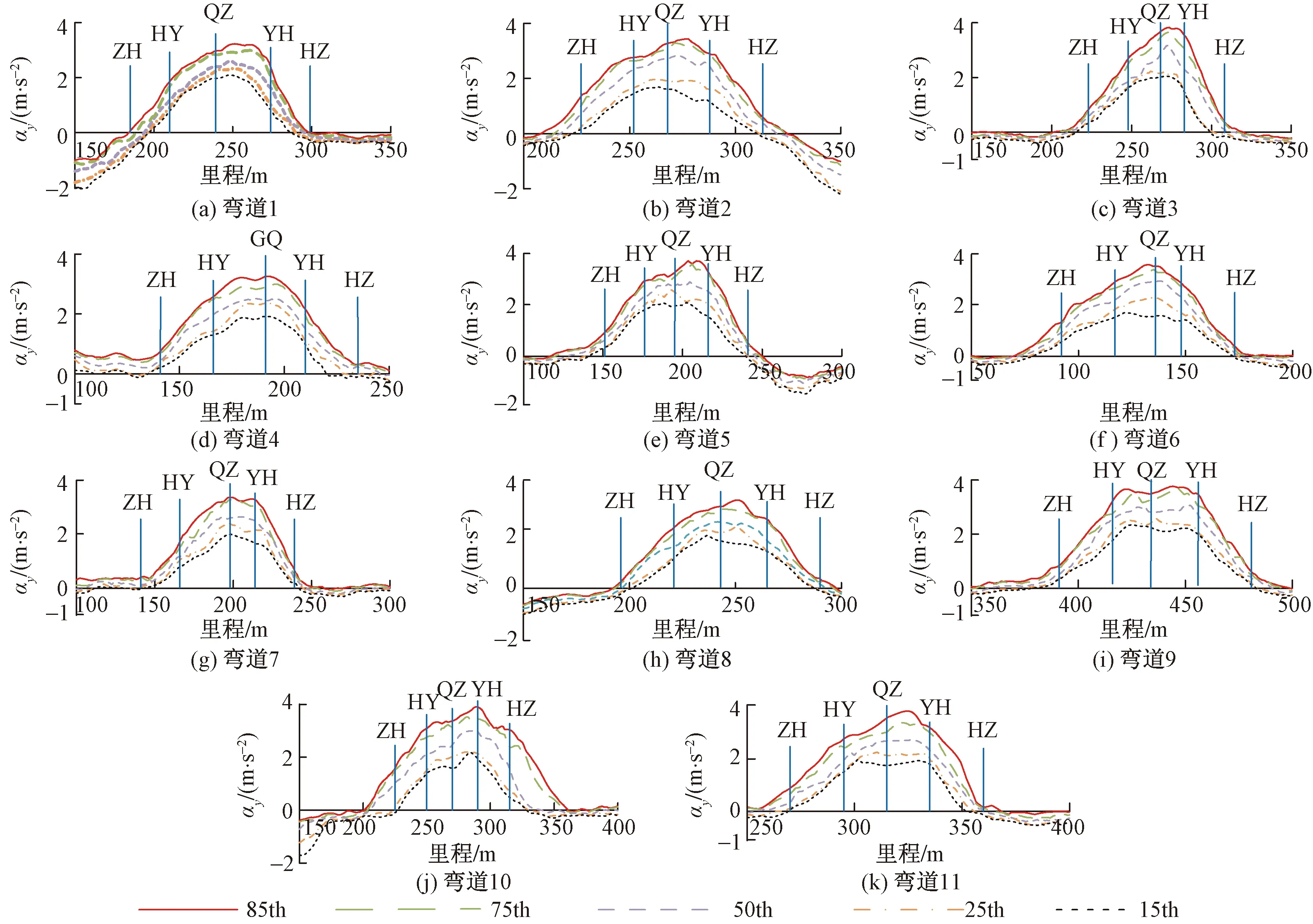
图8 右转横向加速度特征值曲线图Fig.8 Eigenvalue curve of right lateral acceleration
观察左、右转弯道横向加速度以及特征值的变化趋势,可以看到不同驾驶员通过同一个弯道时横向加速的变化存在较大差异,曲线形态也各有不同。为便于分析横向加速度模式,提取每位驾驶员在弯道处的横向加速度以及85th百分位特征值曲线,根据曲线变化趋势、单调性和峰值点数量,把曲线形态相同的加速度曲线和百分位特征值曲线以QZ点对齐并叠加,并得到4种曲线形态,即4类横向加速度变化模式。
图9和图10分别是左转和右转弯道横向加速度变化模式示意图。对比分析图9和图10中横向加速度叠加图可以看到,模式Ⅰ、模式Ⅱ以及模式Ⅲ中左、右转横向加速度整体分布在2~4 m/s2;模式Ⅳ中横向加速度分布区间略有不同,原因可能是受限于道路环境(轨迹半径较小,视野较差),波动范围较小,左转横向加速度波动范围在2~4 m/s2,而右转波动范围在1~3 m/s2。综合上述左转回头曲线和右转回头曲线的横向加速度变化模式,得到4类模式的具体变化特征,如表2所示。
3 横向加速度峰值特征分析
3.1 横向加速度统计特性
逐个提取每位驾驶员在每个弯道的横向加速度最大值,按0.6 m/s2为区间进行划分,绘制得到左、右转的横向加速度频数分布图,如图11(a)所示;提取本次实验中左、右转弯道横向加速度数据以及文献[20]中双车道公路一般弯道横向加速度数据,按升序排列并绘制出横向加速度累计频率曲线图,如图11(b)所示。
观察图11(a)可以看到横向加速度的频数呈现出中间高,两边低的分布形态,整体呈正态分布,而
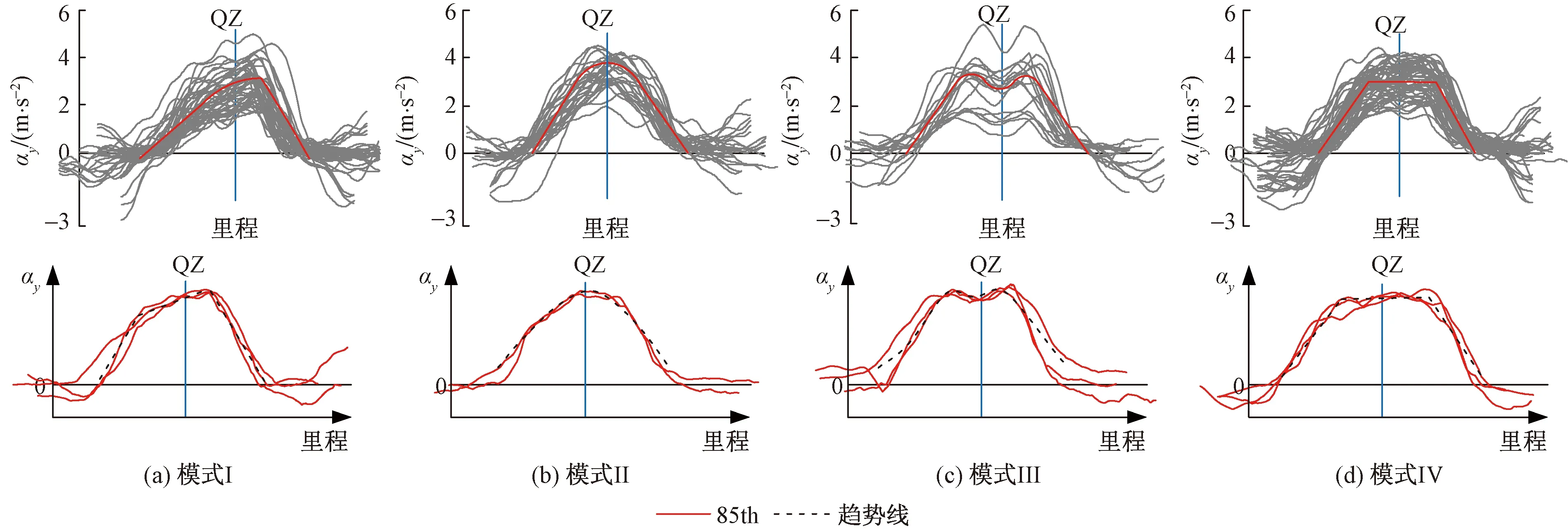
图9 左转弯道横向加速度变化模式Fig.9 Change mode of lateral acceleration in left turn
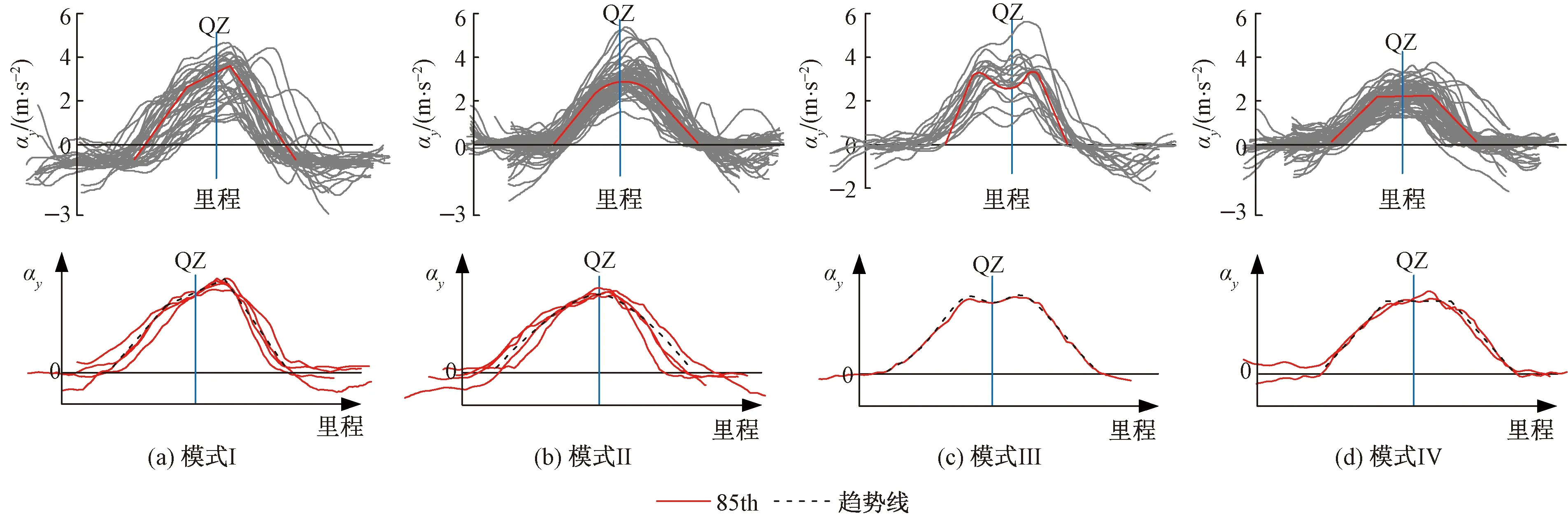
图10 右转弯道横向加速度变化模式Fig.10 Change mode of lateral acceleration in right turn
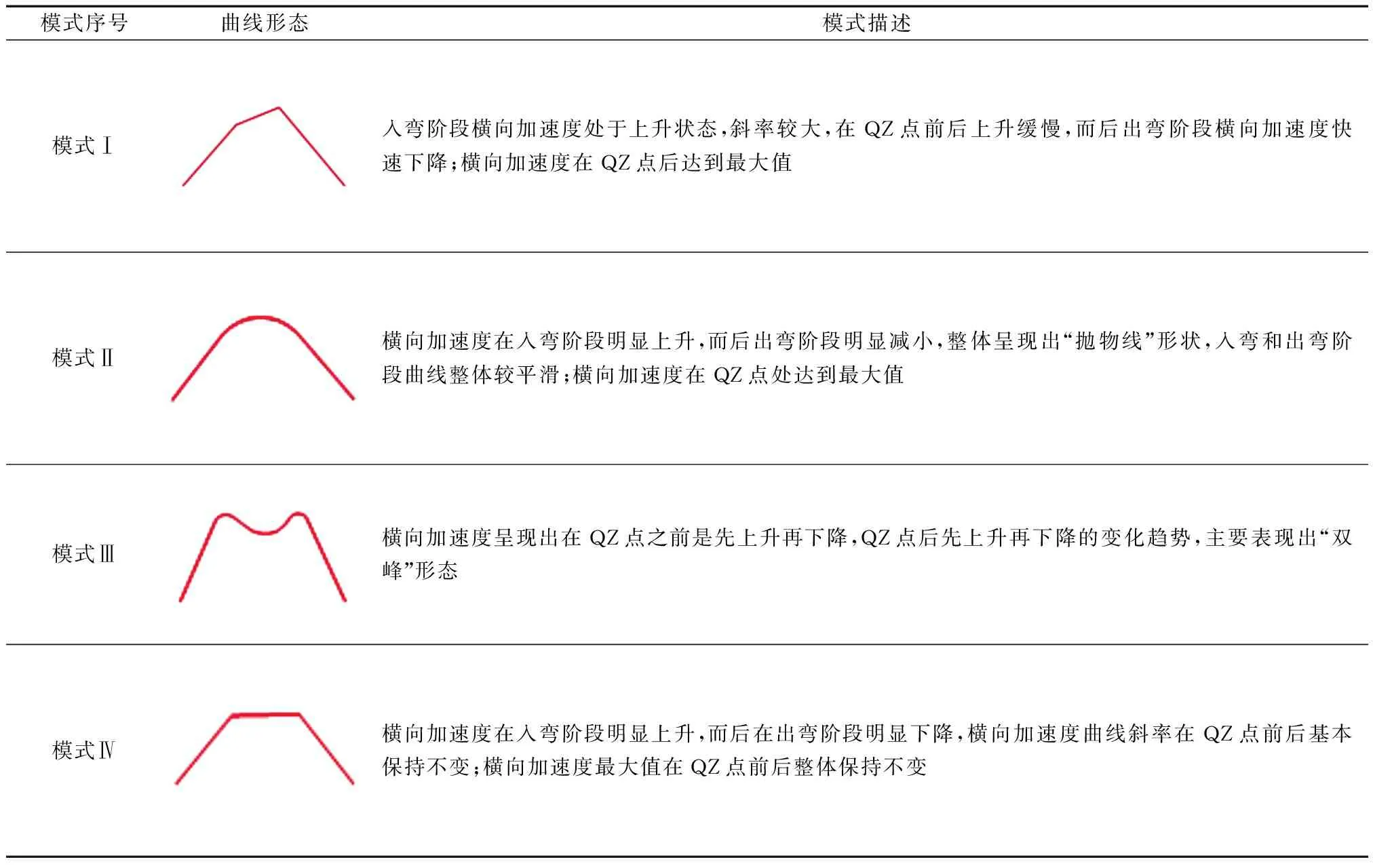
表2 横向加速度变化模式Table 2 Change mode of lateral acceleration
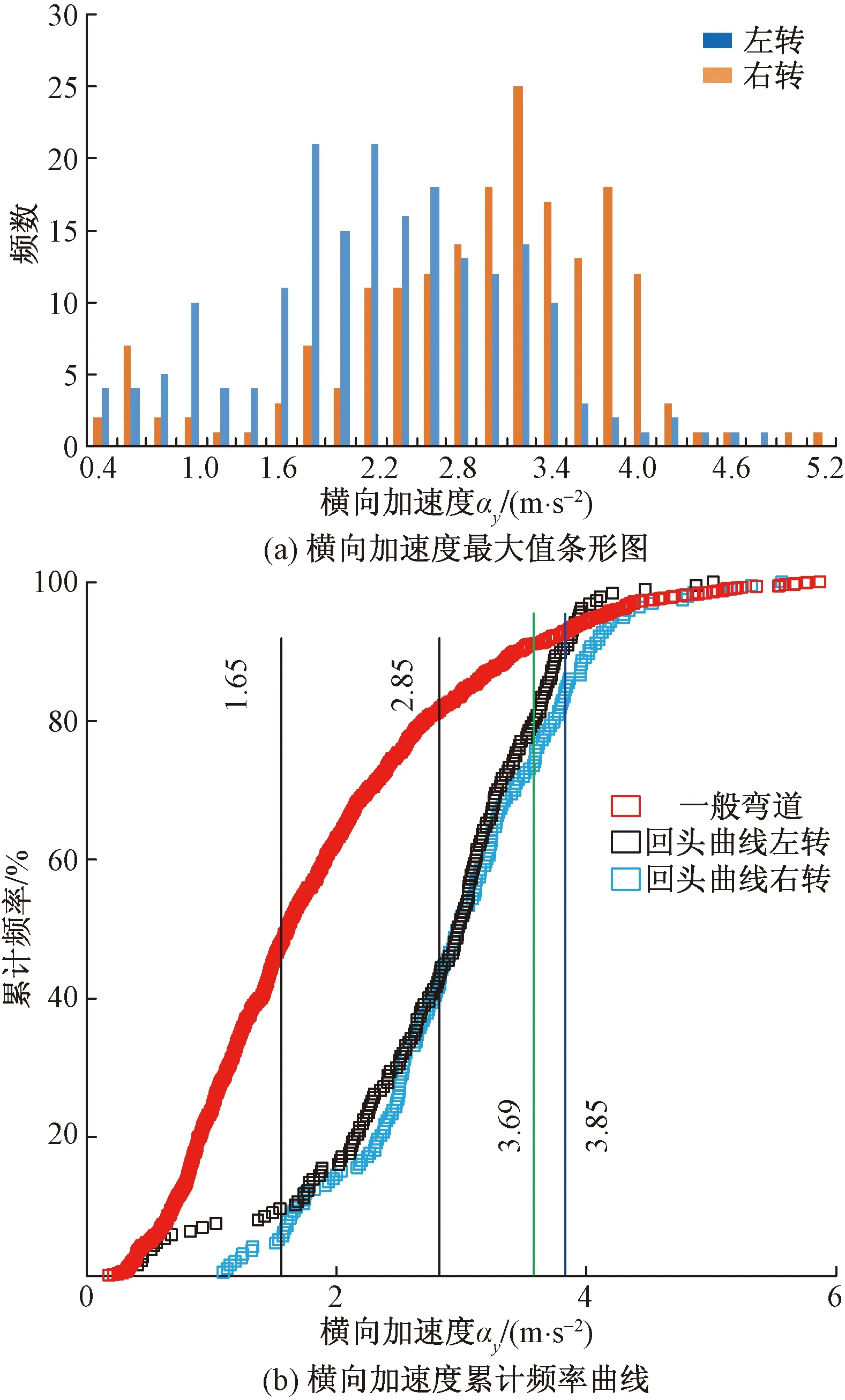
图11 横向加速度对比图Fig.11 Lateral acceleration contrast diagram
左转加速度呈偏左正态分布,右转则是偏右正态分布。对比分析左右转条形图,可以看出左转横向加速最大值在整体上小于右转横向加速最大值。
观察图11(b),左转和右转的横向加速度累计频率重叠比例较高,累计频率变化趋势基本一致,说明左、右转过弯时横向加速度的变化差距并不大。文献[21]中给出调整后的舒适性推荐值,如表3所示,调整后的舒适性推荐值更能贴近驾驶员的感受,舒适和较舒适推荐值分别是1.65 m/s2和2.85 m/s2。由图11(b)中数据求出满足舒适推荐值的累计频率约为52%,满足较舒适推荐值的累计频率约为82%;由本次试验实测数据求出在左转过程中,满足上述较舒适推荐值的横向加速度累计频率约为43%,右转过程中满足上述较舒适推荐值的横向加速度累计频率约为44%,对比分析可以得到回头曲线横向加速度不能较好的满足文献[21]中修正后的较舒适推荐值,表明双车道公路一般弯道横向加速度推荐值不能较好地评价回头曲线段的横向舒适性。
另外通过本次实验数据得到,左、右转过弯时均有部分实测值超过4 m/s2;左转过弯时,85th百分位横向加速度值是3.85 m/s2,在94th百分位处有明显拐点,其数值大小是4.2 m/s2;在右转过弯时,85th百分位横向加速度值是3.69 m/s2,在97th百分位处存在明显拐点,其值是4.2 m/s2;一般弯道中,85th百分位横向加速度值是3.07 m/s2。由此可以得到,回头曲线路段的横向加速度分布显著区别于双车道公路一般弯道,横向加速度的幅值更高,说明驾驶员行驶在回头曲线上时能够容忍程度更高的横向不舒适。
提取每个弯道左、右转横向加速度最值和典型百分位值,并增加了文献[20]中关于双车道公路横向加速度典型百分位特征值的研究结果,整理得到表4,对比回头曲线典型百分位特征值均值和一般弯道的典型百分位特征值均值,可以看到一般弯道的横向加速度均值均小于回头曲线的横向加速度均值,但是随着百分位的增加,两者之间的差距在缩小,其中,在85th百分位时,两者还相差1.58 m/s2,说明回头曲线路段横向加速度普遍大于一般弯道横向加速度。
表3 横向加速度舒适性阈值Table 3 Lateral acceleration comfort threshold
3.2 横向加速度峰值位置分布
提取每位驾驶员每次在回头曲线路段行驶时横向加速度的最大值,并对横向加速度峰值出现的里程位置进行标记,得到数据点对(Li,αymax,i),其中αymax,i为横向加速度峰值,L为行驶里程,i为某处回头曲线第i次行驶。以每个弯道ZH~HZ之间里程为区间进行划分,对每个区间内数据点对进行标记统计,绘制得到左、右转横向加速度峰值位置分布图,如图12和图13所示。
观察图12和图13可知,左、右转过弯过程中,横向加速度峰值主要分布在1.8~4 m/s2;左转横向加速度峰值分布位置呈现出较强规律性,从出现峰值的里程位置来看,每个弯道前后均出现峰值点;横向加速度峰值的位置关系主要分位3种情况:一是峰值点多分布在HY~QZ点之间,如左转弯道6、12以及右转弯道10;二是峰值点多集中QZ点处或QZ~YH之间,如弯道2、4、5、7、8、9及右转弯道1、3、4、5、6、7、8、9、12;三是峰值点多出现在YH点处及较离散的分布在YH点后,如弯道1、3、11及右转弯道11。根据第二种峰值点分布情况,左、右转弯道数占比较高,说明多数驾驶员在左、右转过弯过程中驾驶行为比较一致;驾驶员在过弯过程中的横向加速度峰值多集中在QZ~YH之间,容易发生溜滑、侧翻等安全事故,需要在回头曲线弯中QZ~YH之间加强防滑、防撞设施的建设。
4 结论
为明确山区低等级公路回头曲线路段的横向加速度的变化特性,通过实车试验采集自然驾驶状态下连续通过12个回头曲线的横向加速度数据,以此开展研究,得出如下结论。
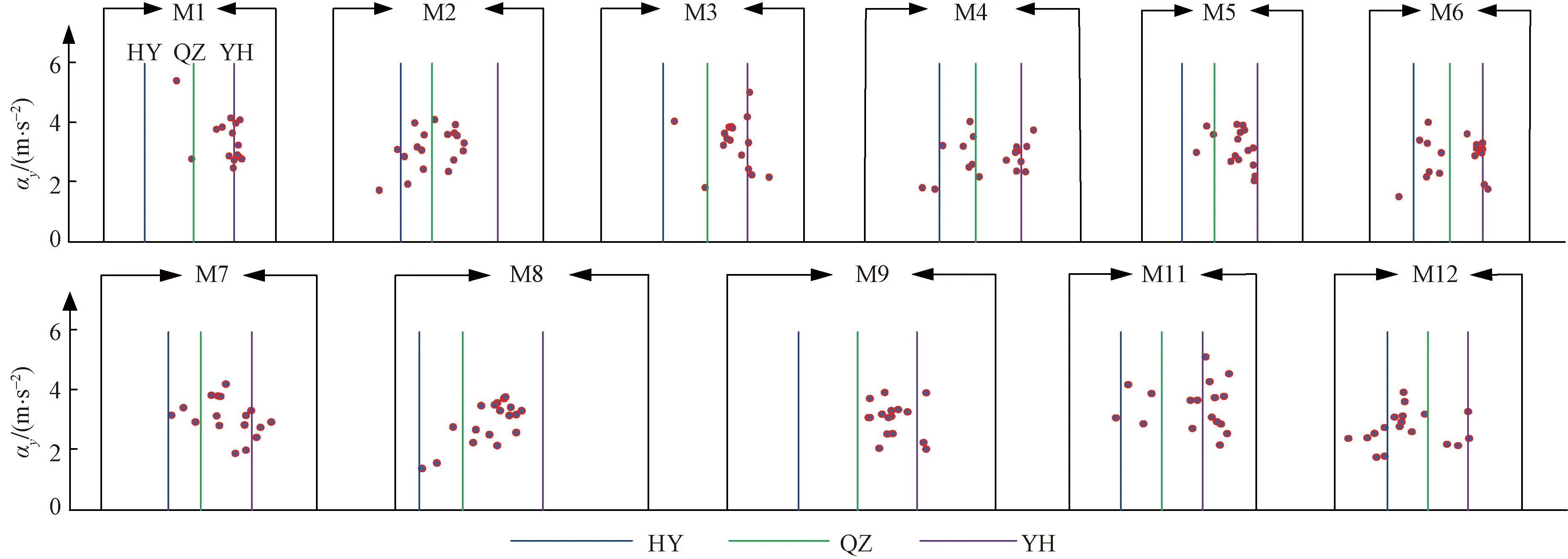
图12 左转横向加速度最大值位置分布图Fig.12 Distribution diagram of maximum position of left lateral acceleration
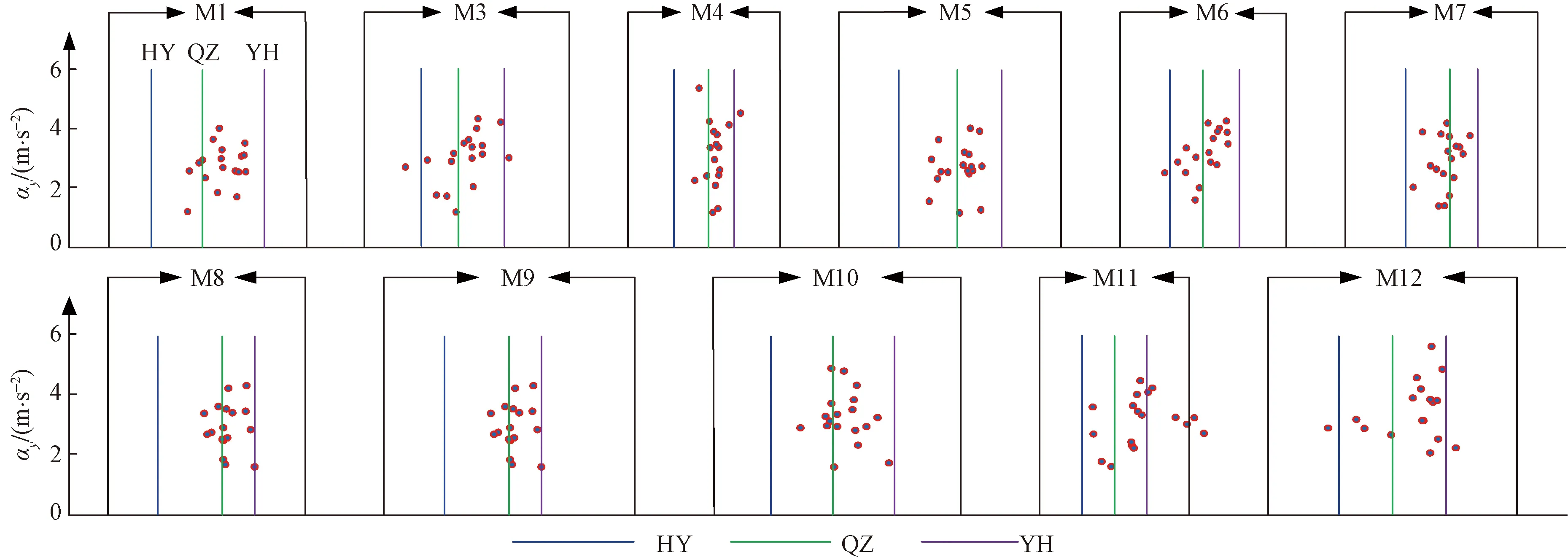
图13 右转横向加速度最大值位置分布图Fig.13 Distribution diagram of maximum position of right lateral acceleration
(1)回头曲线段横向加速度整体变化特征可以分为3个阶段:入弯明显增大阶段,弯中相对稳定阶段,出弯明显减小阶段,但是在弯中阶段变化趋势存在明显差异;根据横向加速度85th特征曲线变化趋势,可以划分为四类横向加速度变化模式。
(2)回头曲线横向加速度分布与双车道公路一般弯道的横向加速度分布有明显差别,驾驶员在回头曲线段能容忍更高程度的横向不舒适。
(3)回头曲线段横向加速度典型百分位值普遍大于一般弯道横向加速度典型百分位值,但随着百分位的增加,两者之间的差距逐渐减小。
(4)回头曲线路段内横向加速度峰值位置分布主要有3种情况,其中峰值多集中在QZ~YH段内,增大了发生安全事故的概率,因此需要在此路段加强路面抗滑、路侧防撞、警示标志等交安设施的建设或者适当扩宽路面以减少安全隐患。
