基于车让人的右转专用相位设置条件研究
2021-01-07胡桂戎
胡桂戎
(陕西警官职业学院治安系, 陕西西安 710021)
0 引言
2017年4月,公安部在全国部署开展不礼让斑马线专项整治行动。根据西安市交警支队发布的让行细则[1],当行人步入斑马线,车辆行经交叉路口转弯时,右转车辆必须让行。车让人细则实施后右转机动车通行效率大幅下降。信号控制交叉口优化右转机动车和行人冲突的方法之一是设置右转专用信号相位,将行人和右转机动车进行时间分离。
目前,国内外针对右转机动车和行人冲突优化研究的文献中,胡桂戎等人[2]基于车让人背景对右转机动车与行人冲突原因进行了分析,并从车让人细则完善以及冲突分离两方面给出了右转机动车通行效率的提高策略,但没有给出具体的适用条件;Petritsch等人[3]给出了传统信号交叉口右转专用信号设置条件;基于冲突的相位设置研究中,苏岳龙等人[4]通过仿真模型比较和研究右转专用相位的设置对通行效率的影响,给出了设置右转专用相位的关键技术参数:当右转机动车与行人冲突概率达到0.6时,应考虑设置右转专用相位;张茂民等人[5]通过建立信号控制延误和行人干扰延误的分析模型,进而提出右转车辆控制条件,应用仿真得出了实施控制后右转车延误比无信号控制时延误更小的结论; 张碧琴等人[6]定量分析了新建城区交叉口右转机动车与行人分相位临界条件;李克平等人[7]运用 VISSIM 仿真,确定了采用信号控制的方法分离二者冲突时的临界流量条件;韩印等人[8]建立了右转车辆穿越行人的两类延误模型,并证明了模型的实用性;徐建闽等人[9]为减少右转机动车与过街行人之间的冲突,提出了设置右转专用相位的控制方法,给出了不同流量的情况下设置右转专用相位的临界值,但在计算过程中没有考虑启动停车损失时间;刘艳娟等人[10]以行人过街时间和过街速度为指标,分析了“车让人”政策实施前后行人过街特性;刘晓辰[11]以传统通行规则为前提,提出设置右转机动车禁行相位来缓解右转机动车和行人冲突,并给出了设置前后的延误情况分析。
可以看出,现有研究成果大都以允许右转机动车寻找行人间的最小可穿越间隙为研究基础,而该研究基础与车让人让行细则下通行规则有较大差别,故研究成果适用性有所下降。基于以上研究背景和国内外研究现状,本文在充分调研及分析的基础上,结合西安市具体礼让细则,分析不同礼让特征行为下右转机动车穿越行人的差异,探索如何在保障行人安全的前提下,通过设置右转专用信号相位提高右转机动车的通行效率,减少右转机动车的延误。
1 交通调查分析
针对现状右转信号控制最为常见的无右转专用相位信号控制交叉口交通,调查交通流量以及右转机动车礼让行人行为特征。
1.1 基于车让人的右转机动车通行效率调查
选取早高峰时段分别对东进口和东出口进行交通流量调查。
经过对调查数据统计分析,现状交通量为308 pcu/h/lane,过街行人流量为1 031人/h。交叉口运行状况达到饱和后交通警察对右转机动车实施现场交通指挥,采用时间分离的方法,将右转机动车和过街行人分开放行,通行规则等同于右转专用信号控制。放行期间连续绿灯时间内饱和流率为1 045 pcu/h/lane,交通量为612 pcu/h/lane,过街行人饱和流率为1 647人/h,过街行人流量为870人/h。对比分析时间分离前后调查数据,设置右转专用信号相位后,右转机动车通行效率较无右转专用相位时提高98.7%。
1.2 右转机动车礼让行人现状调查
选取无右转专用相位交叉口的1 801辆右转机动车礼让行人的行为现状进行抽样调查。调查过程中的相关概念界定与说明如下:
(1)不礼让行人:行人位于右转机动车与行人最小冲突区域内时,右转机动车没有礼让行人。
(2)右转机动车与行人最小冲突区域:右转机动车行驶轨迹与斑马线交集以及左右两侧安全距离范围内。按照安德伍德的推算理论,安全距离一般取1.8 m[12]。
右转机动车与行人最小冲突区域如图1所示,wct为冲突区域宽度。
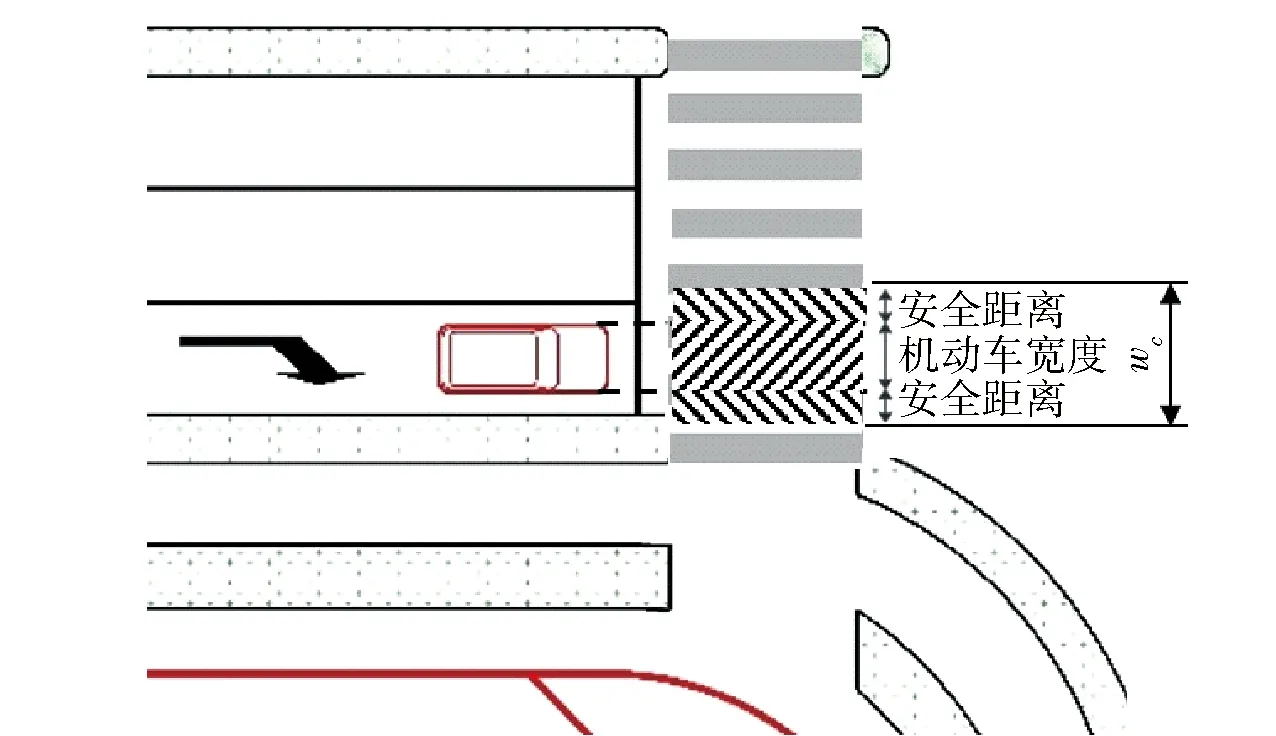
图1 右转机动车与行人最小冲突区域
(3)右转机动车与行人冲突区域:同向(驾驶人右侧)行人踏入斑马线(无机非隔离带时)或到达右侧机非隔离带、对向(驾驶人左侧)行人到达右转车道左侧相邻车道左分界线。
右转机动车与行人冲突区域如图2所示,wct为冲突区域宽度。
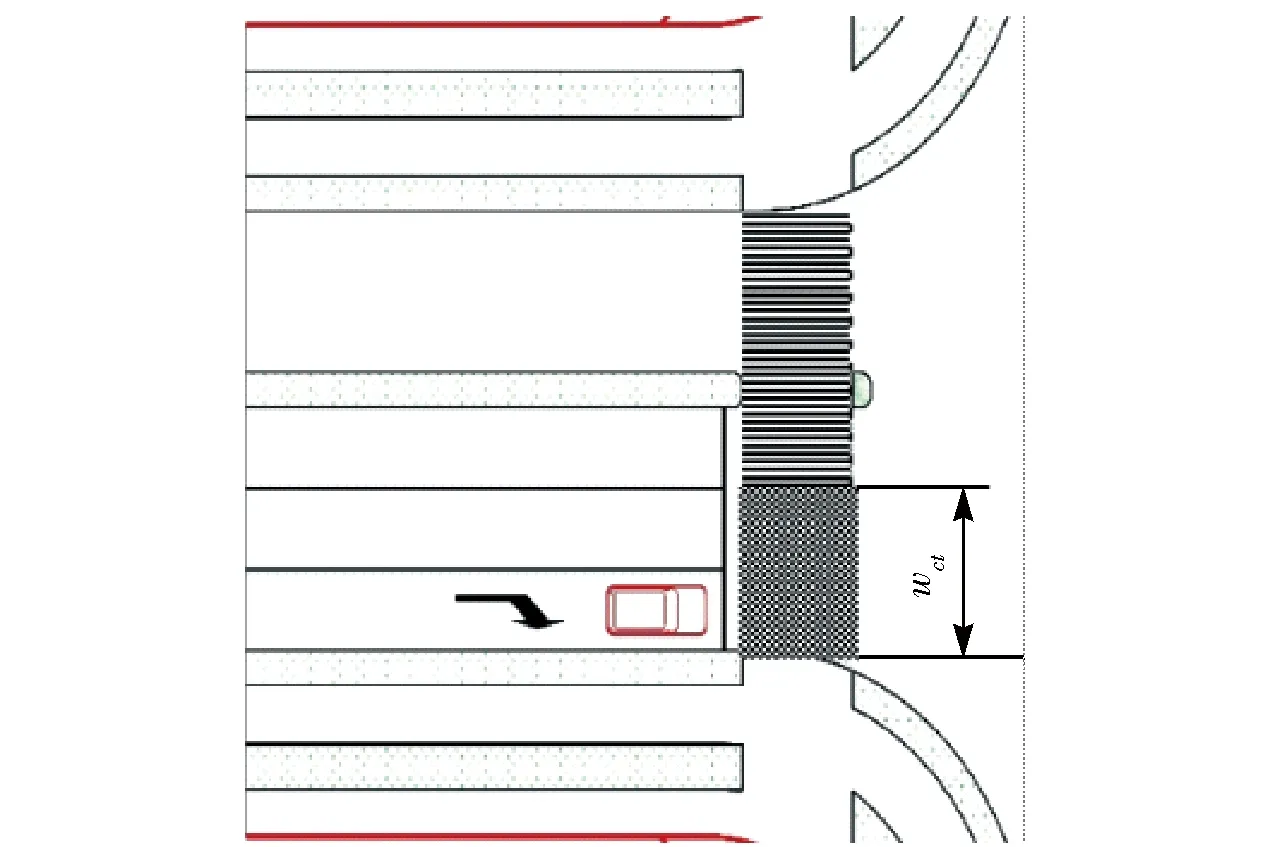
图2 右转机动车与行人冲突区域
统计数据显示,86.94%的车辆在右转机动车与行人冲突区域前礼让行人,13.06%的右转机动车在行人位于右转机动车与行人最小冲突区域内时不礼让行人。在礼让行人的右转机动车中,具体礼让行为可归结为3种情况,具体数据如表1所示:
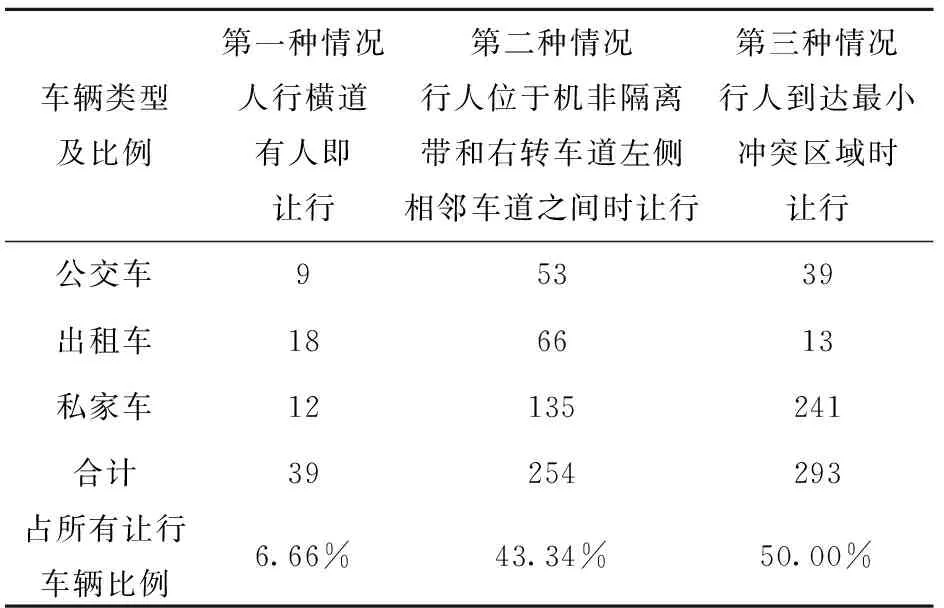
表1 右转机动车礼让行人特征分析统计表
第一种情况下右转机动车与行人冲突区域如图3所示,wct为冲突区域宽度;第二种情况下右转机动车与行人冲突区域如图2所示,第三种情况下右转机动车与行人冲突区域如图1所示。
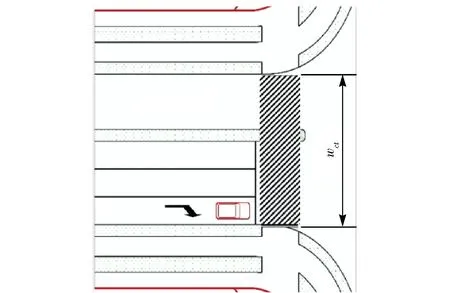
图3 第一种情况下右转机动车与行人冲突区域
通过调查数据可以看出,公交车和出租车礼让行人比例最大,礼让行人的右转私家车中有66.6%的车辆在行人到达最小冲突区域时才会礼让行人。
1.3 右转机动车礼让行人不同情况下的冲突分析
1.3.1 不同让行情况下的冲突过程分析
针对表1中给出的不同让行情况,右转机动车在让行过程中与行人间冲突过程有所差异,具体描述如下:
(1)人行横道有人即让行
在行人绿灯信号期间,过街行人对右转机动车的干扰分为两个阶段:第一阶段:从行人绿灯启亮到行人红灯信号期间累积的行人相继过街,这一阶段内到达的右转机动车停车等待;第二阶段:行人红灯信号期间累积的行人消散后,此后人行横道上无随机到达的行人时右转机动车通行。
(2)行人位于机非隔离带和右转车道左侧相邻车道之间时让行
在行人绿灯信号期间,过街行人对右转机动车的干扰分为3个阶段。第一阶段:从行人绿灯启亮到两侧过街行人到达冲突区域边界前,该时间段内到达的右转机动车可通行,此时右转机动车没有延误;第二阶段:两侧过街行人到达冲突区域边界,即同向行人到达机非隔离带、对向行人到达右转车道左侧相邻车道的左车道分割线,此时在行人信号红灯期间累积的过街行人连续通过冲突区域,该阶段内到达的右转机动车需要在人行横道前停车等待;第三阶段:行人红灯信号期间累积的行人消散后,右转机动车寻找可穿越间隙通过冲突区域, 即在同向过街行人到达时间间隔大于行人通过冲突区域所需时长时,右转机动车可通行,该阶段内到达的右转机动车,首先判断是否存在可穿越间隙,然后做出能否穿越的决定。
(3)行人到达最小冲突区域时让行
这种情况下,在行人绿灯信号期间,过街行人对右转机动车的干扰与第二种情况类似,区别在于冲突区域的范围变小,在此不再赘述。
1.3.2 不同让行情况下的穿越间隙分析
基于以上分析可以发现,延误的区别在于3种情况下的冲突区域宽度不同(见图1~3),即右转机动车穿越行人所需的可穿越间隙大小不同,分析和计算方法相同。根据右转机动车穿越人群有无可穿越间隙具体计算过程如下:
(1)当右转机动车判断过街行人之间存在可穿越间隙时,右转机动车直接穿越通行,穿越过程中右转机动车穿越的距离包括3部分: 判断决定距离S、冲突区域长度(一般等于人行横道宽度)Lct、车身长度Lc。假定右转机动车初始速度为vc,冲突区域宽度wct,行人过街速度为vp,右转机动车穿越过街行人的临界可穿越间隙为τ1,则有式(1)成立。
(1)
整理式(1)可得右转机动车穿越过街行人的临界可穿越间隙
(2)
设h1为过街行人到达的时间间隔,则右转机动车穿越过街行人的概率为
P(h1≥τ1)
(3)
(2)当右转机动车判断过街行人之间不存在可穿越间隙时,右转机动车由初始速度vc减速直至在冲突区域前停车等待,当过街行人之间出现可穿越间隙时,右转机动车加速离开。穿越过程中右转机动车穿越的距离包括两部分: 冲突区域长度Lct、车身长度Lc,设右转机动车加速离开时的加速度为a2,右转机动车穿越过街行人的临界可穿越间隙为τ2,则有式(4)成立。
(4)
整理式(4)可得右转机动车穿越过街行人的临界可穿越间隙
(5)
则此时右转机动车穿越过街行人的概率为
P(h1≥τ2)
(6)
2 右转专用相位设置条件
基于右转机动车在车让人通行细则下的通行效率下降,右转机动车的延误是右转专用相位设置的根本因素,将右转机动车和过街行人流量作为设置右转专用相位的研究变量,基于车让人通行细则提出右转机动车延误最小的右转专用相位设置条件如下:
右转专用相位设置前的延误为过街行人干扰造成的右转机动车延误,右转专用相位设置后的延误为信号控制造成的右转机动车延误,设Tdelay1是右转专用相位设置前的右转机动车延误,Tdelay2是右转专用相位设置后的右转机动车延误,则基于车让人的右转专用相位设置条件如式(7)所示。
Tdelay1>Tdelay2
(7)
设右转机动车与过街行人的到达均服从泊松分布,则右转机动车与过街行人到达的时间间隔均服从负指数分布。则到达的时间间隔不小于t的概率为
P(h≥t)=e-λt
(8)
到达的时间间隔概率分布的概率密度函数为
f(t)=λe-λt
(9)
2.1 右转专用相位设置前的延误分析
右转专用相位设置前的延误为过街行人干扰造成的右转机动车延误。
右转机动车与行人相互干扰的过程可分为3个阶段,因此行人干扰而造成的右转机动车延误计算也相应分为3个阶段。
(1)从行人绿灯启亮到两侧过街行人到达冲突区域边界前所需时间
除第一种情况外,这段时间内到达冲突区的右转机动车可直接通过,右转机动车无延误。设Lp表示路沿到冲突区域边界的距离,ta表示行人从路沿到达冲突区域边界所需的时间,则有:
(10)
鉴于右转机动车礼让行人的3种情况下冲突区域宽度不同,也就是路沿到冲突区右侧边界的距离Lp不同决定了ta的差异,具体如表2所示。

表2 不同让行情况下ta差异
(2)红灯期间内累积的行人到达并穿越冲突区域所需时间
基于车让人通行细则,该阶段内到达的右转机动车必须停车等待。行人绿灯启亮后,累积的行人到达冲突区域边界,行人排队长度由最大值逐渐减少,当其减少至零时所经历的时间为行人疏散时间,用tb表示。
(11)
式中:λ′q为行人到达率,λ′Q表示行人离开的饱和流率,Tr表示行人红灯时长。
np表示饱和流率下每排的行人数,dp表示前后两排行人之间的平均间距,tc表示行人群从到达到穿越冲突区所需时长,则有:
(12)
该阶段内到达的右转机动车的延误包括因等待行人群消散延误的时间以及等待前后因停车而造成的加减速延误。设a1是右转机动车减速停车的减速度,根据定积分中值定理,每辆右转机动车平均等待时间de1可由式(13)表示,加减速延误de2可由式(14)表示。
(13)
(14)
故该阶段内右转机动车的延误总时间D1可由式(15) 表示。
D1=λqtc(de1+de2)
(15)
式(15)中,λq是右转机动车到达率。
(3)红灯期间累积的行人离开冲突区后,右转机动车寻求过街行人间的可穿越间隙通行。该阶段内右转机动车没有可穿越间隙时选择停车等待。该阶段内平均达到右转车辆数N1可由式(16)表示。
N1=λq(Tg-ta-tc)
(16)
式(16)中Tg为行人绿灯时间。
停止等待过程中,右转车辆延误包括加、减速造成的延误以及等待时间两部分。加、减速造成的延误可由式(14)表示。

(17)
假设行人到达有n个时间间隔,右转机动车在冲突区前等待行人的平均个数与小于τ2的行人时间间隔的个数相同,根据排队论可表示为:
(18)
因此,每辆停车等待的右转机动车平均等待时间可由式(19)表示。
(19)
该时间内所有停车等待的右转机动车的延误总时间D2可由式(20)表示。
D2=N1[1-P(h1>τ1)](de2+de3)
(20)
综上所述,一个进口道上因行人干扰而造成的右转机动车延误时间由式(21)表示。
Tdelay1=D1+D2
(21)
2.2 右转专用相位设置后的延误分析
右转专用相位设置后,右的转机动车的延误与相位设置相关。以图4所示的四相位信号控制方案为例分析右转机动车受右转专用相位控制时的延误时间。由图4可知,一个信号周期内右转机动车可获得两次通行权,分别在第二相位和第四相位,故右转机动车在一个信号周期内有两次排队消散过程,该控制方案下的右转机动车延误如图5所示。

图4 典型四相位信号控制相位图
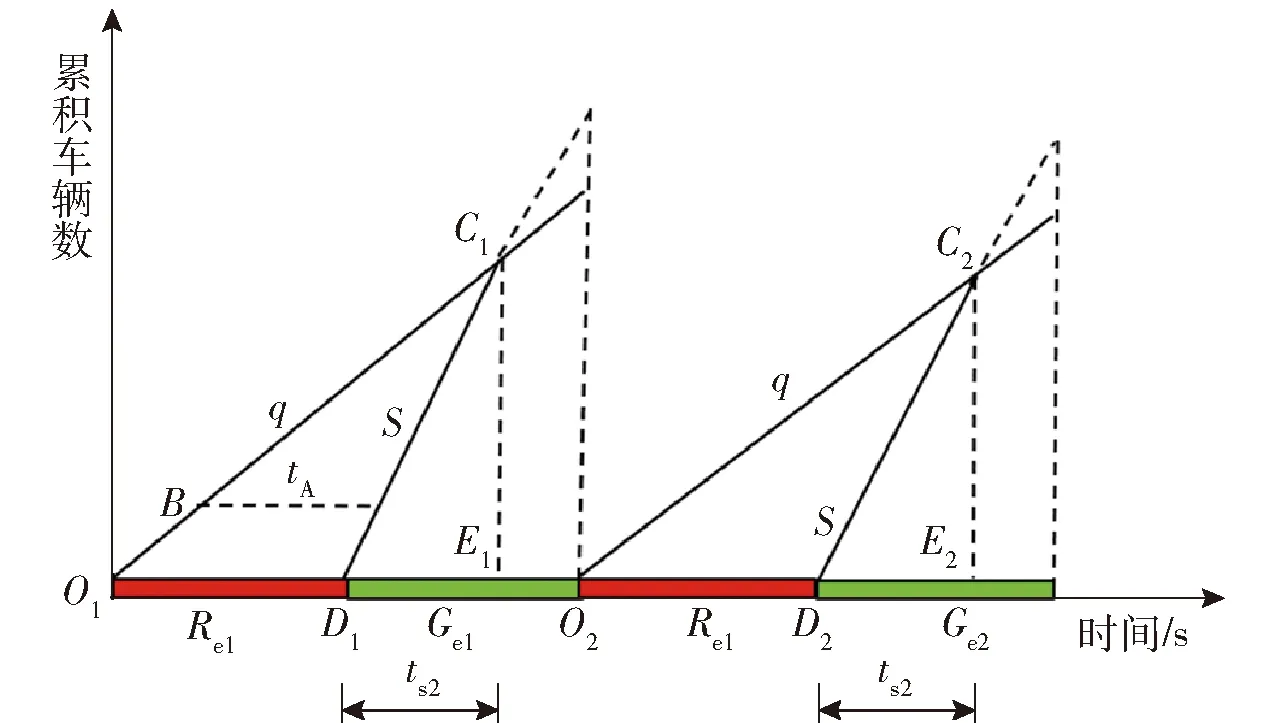
图5 右转机动车延误分析
图5中,Re1表示红灯第一次启亮时的等效红灯时间,也是信号周期开始时刻,Ge1表示绿灯第一次启亮时的有效绿灯时间,Re2表示红灯第二次启亮时的等效红灯时间,Ge2表示绿灯第二次启亮时的有效绿灯时间,q表示右转机动车到达率,S表示右转机动车的饱和流率。右转机动车排队消散过程如下:等效红灯时间内到达的右转机动车在停止线前排队等待,绿灯启亮后,累积的排队车辆开始消散,点C1和C2表示累积的排队车辆消散完毕,在此之后到达的右转机动车可不停车通行。图5中ts1和ts2分别表示第一次绿灯时间内和第二次绿灯时间内的疏散时间,C1E1表示疏散时间ts1内放行的车辆数,C2E2表示疏散时间ts2内放行的车辆数,点B表示等效红灯时间到达的右转机动车B,因前方有车辆排队,需要经过一定的延误时间才能通过停车线,tA则表示右转机动车B的延误时间,不难看出,在△O1C1D1中,水平线对应为每一辆车的延误时间(△O2C2D2同理),则易知在右转机动车到达率不变的情况下,右转机动车的周期总延误为图5中△O1C1D1和△O2C2D2的面积之和[13]。
右转机动车周期总延误时间可由式(22)所示。
(22)
其中:
Gei=Gi+A-l
(23)
Rei=Ci-Gei
(24)
(25)
(26)
式中:Gi表示第i次绿灯时长,A为黄灯时长,l为启动停车损失时间,Ci为第次绿灯、黄灯和红灯时长之和。
3 实证分析
现有一十字交叉口,采用四相位信号控制,行人与同向直行机动车同步放行,配时方案为东西直行30 s,东西左转20 s,南北直行30 s,南北左转20 s,两相位之间均设有2 s黄灯时间。该交叉口每个进口有一条右转专用车道,现以南进口的为例,分析不同右转机动车和行人流量时有无右转专用信号相位两种情况下的总延误。
无右转专用相位时,不同流量下行人干扰造成的右转机动车延误如图6所示。
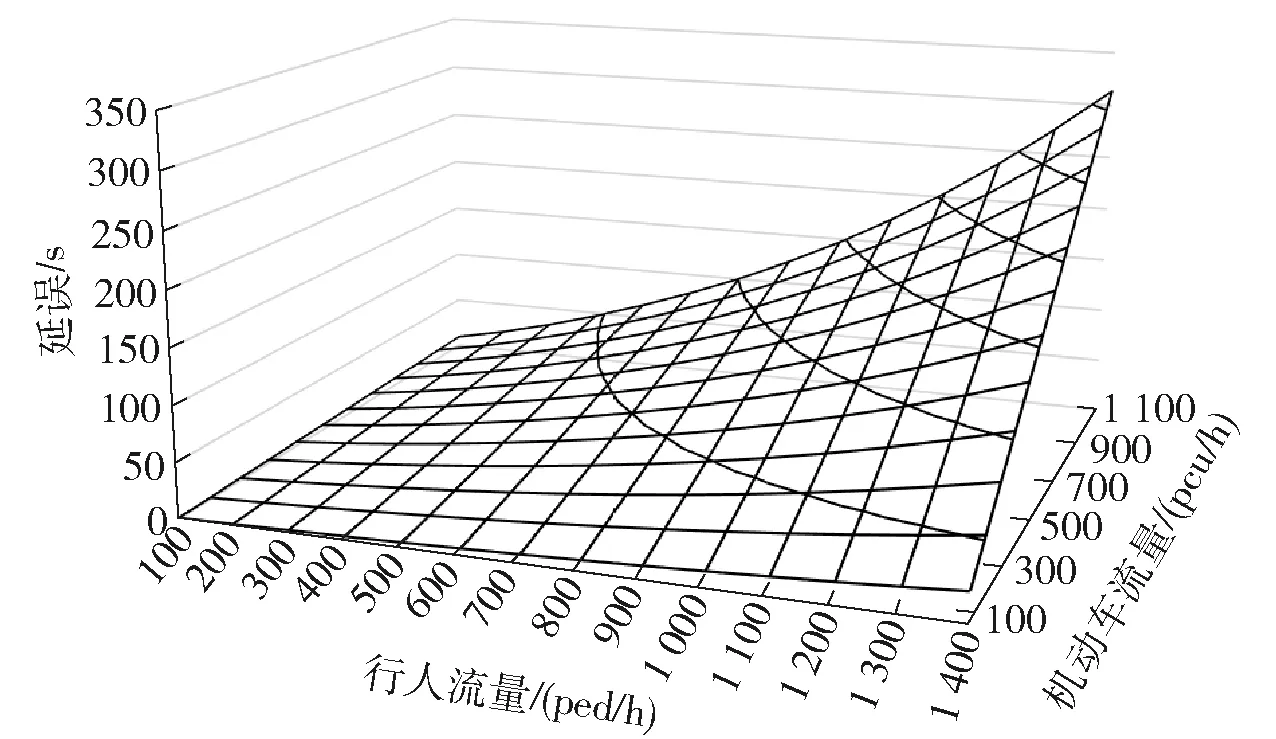
图6 不同流量下行人干扰造成的右转机动车延误
从图6可以看出,右转机动车的延误随着右转机动车和行人流量的增加而增大,且延误的增长速度对高流量区域更敏感,所以,右转机动车或行人流量中任一流量较高且另一流量增大时,需判断是否需要设置右转专用相位。
设置右转专用信号相位后,右转机动车的延误具体变化如图7所示。由图可见,右转机动车的延误随着右转机动车流量的增加而增加。

图7 不同流量下信号控制造成的右转机动车延误
将有无右转专用相位情况下的延误进行比对,如图8所示。图中可以看出,当折线位于散点下方时,说明设置右转专用信号时的延误小于未设置右转专用相位时的延误,此时需要设置右转专用相位;当折线位于散点上方时,不需要设置右转专用相位。
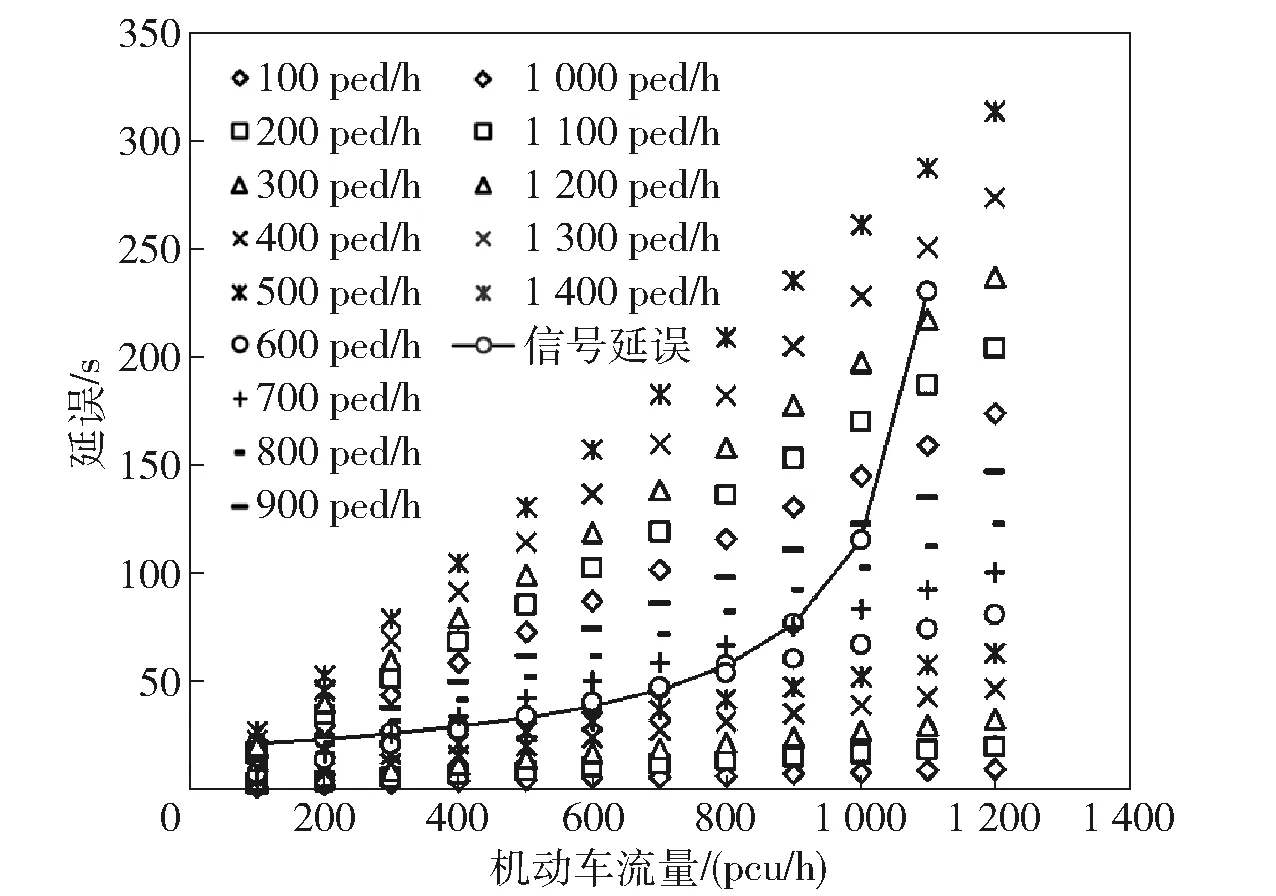
图8 有无右转专用相位情况下的延误对比
若选用第三种让行情况进行延误计算,有无右转专用相位情况下的延误对比如图9所示。
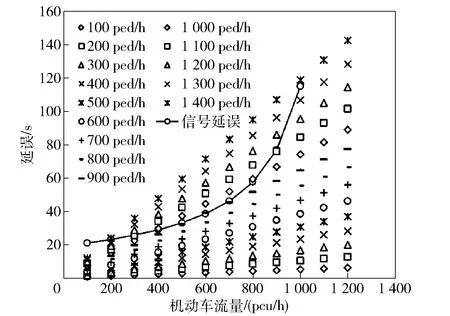
图9 第三种让行情况下的延误对比
对比图8和图9,右转机动车在最小冲突区域前让行可减少右转机动车的延误,但行人过街安全性较低,建议细化让行细则,规定右转机动车在行人位于机非隔离带和右转车道左侧相邻车道之间时让行,并在机动车或行人流量达到临界流量标准时,采用右转专用信号控制的方式在保证行人过街安全的前提下减少车辆延误。
4 结语
本文针对车让人通行细则下信号交叉口右转机动车通行效率下降的问题,通过交通调查分析了通行效率下降的原因,通过对右转机动车礼让行人特性进行调查统计分析,对右转机动车礼让行人行为特征进行了分类,对比分析了不同让行行为下的穿越间隙,并基于此提出了车让行通行细则下信号交叉口右转专用信号相位设置的条件和计算办法,并进行了实证分析,最终给出了不同让行情况下的延误对比和控制建议。但文章在右转专用相位设置条 件研究过程中时只考虑了同向行人对右转机动车干扰,没有涉及到对向行人以及非机动车对右转机动车延误的影响,今后将在提高车让人细则可操作性的基础上考虑对向行人和非机动车对右转机动车的影响,进一步对右转专用信号相位设置条件进行研究。
