高速公路团雾视频监测预警研究
2023-01-14卢振礼安源宗晨临朱海兵李长明郑宗杰
卢振礼, 安源, 宗晨临, 朱海兵, 李长明, 郑宗杰
(1.山东省气象防灾减灾重点实验室, 济南 250031; 2.日照市气象局, 日照 276826; 3.凯迈(洛阳)环测, 洛阳 471003; 4.交通运输部路网中心, 北京 100736)
截至2019年末,中国高速公路总里程14.96万km[1]。随着高速公路发展,团雾天气给高速公路行车安全带来很大威胁,团雾具有突发性强、能见度低、出现范围小、流动性强等特点[2-3]。目前气象交通部门还难以实时、精确地监测预报团雾天气[4]。在高速公路上,车辆驶入团雾区域后不能及时减速,就极有可能引发重特大交通事故[5],事故致死率往往高于一般交通事故[6-7]。
自20世纪中期,公路雾天气就引起中外专家注意并着手研究低能见度监测预警工作[8]。21世纪随着数字图像技术发展,视频监测方法在能见度分析应用上迅猛发展并取得较大成绩[9-10],部分能见度视频监测设备已处于试验发展阶段[11-12]。
国外公路能见度研究起步较早[13-14],Kwon[15]基于固定目标物的视频图像对能见度检测,观测条件要求较高,实现难度增加,随后在场景中设立人工目标物,分析目标物亮度与距离的关系,分析目标物的轮廓清晰程度测算能见度[15-16]。Hallowell 等[17]基于标志图像求解能见度的方法,通过与样本库图像对比估算能见度。近些年,依赖计算机和视频图像处理能力,出现理论体系相对成熟的研究。德国气象学与环境科学研究所利用数码全景摄像仪拍摄的时间序列图像,检测到最远的目标物来估计气象能见度[18]。法国巴黎东区大学假设物体在场景中随距离变化连续分布,提出描述图像对比度分布和大气能见度之间的映射模型估算出能见度[19]。
国内研究起步较晚,随着图像分析技术的发展,国内图像识别雾的研究水平有了较大进步。通过构建感知层、网络层、应用层的系统框架,基于虚拟专用网络(virtual private network,VPN)加密通道技术建立云计算的公路团雾检测与预警系统[20]。基于softmax和多特征团雾图像分类算法,对不同浓度的团雾图像进行描述,实现团雾图像的识别和分类[21]。对比分析4种卷积神经网络模型,构建适用于高速公路气象分类的深度强化学习融合模型,识别团雾天气,有较高的识别率[22]。基于色域分析,利用K近邻算法实现不同等级大雾图像的分类[23]。还有通过水平能见度和大气消光系数关系建立的大气能见度光学模型[24];运用向量机建立大雾识别模型,可计算夜间水平能见度数值[25];运用截取并计算边缘线附近的对比度值分析向量机检测团雾天气[26]。以上研究均取得不同的成果,但有的研究受环境光制约,白天受光源亮度变化影响较大,特别在清晨和傍晚观测值不够稳定,对光源条件要求较为苛刻;有的只适用于白天或夜间,难以实现连续监测[27]。国内高速公路能见度相关标准方面的研究也有了诸多发展,大部分已经投入业务应用[28-29]。
在前人研究基础上,现利用公路上的固定距离间隔发光目标物视频图像监测团雾天气,对团雾多发路段的水平能见度和团雾范围实时监测,可实现团雾的水平能见度、水平尺度同时监测。计算视频图像中发光目标物特征区域光亮度参数,运用前散能见度仪对比校验(并辅以附近目标物人工观测)。用回归分析获得水平能见度光亮度参数模型计算水平能见度,结合相关标准分析判断团雾预警等级,发布团雾分级预警。可解决视频图像无法对夜间团雾水平能见度进行连续监测及清晨和傍晚视频图像易受到太阳高度角影响、环境光干扰等问题。可将发光目标物的视频图像分析、监测预警方法推广至高速公路团雾多发路段,在团雾路段沿线按固定距离安装发光目标物和摄像设备,监测团务发生时的水平能见度变化情况。发光目标物团雾视频分析技术与地理信息系统(geographic information systems,GIS)分析技术、导航技术相结合,将形成及时、准确的高速公路团雾分级预警体系,为高速公路团雾监测预警提供重要技术支撑。
1 资料和方法
1.1 资料
筛选了日照市20余个团雾多发公路路段,经过对比分析,最终确定3处与高速公路环境条件比较接近城市周边快速路,这些多雾路段路灯、视频、附近能见度设备齐全。选择路段路灯照明均为等距离安装(相距30~50 m的间隔),利用路灯附近的交通监控摄像仪不间断对路灯照明设备进行监测,实时获取低能见度视频图像,进而获得路灯的中心区域、边缘区域、路灯外围区域的光照强度、光域范围、光亮度分布等资料,前散能见度仪可获取监测处的实时水平能见度数据资料(并辅以附近目标物人工观测)。视频资料取自日照沿海3条快速路设有固定距离路灯路段,共选取2020年1—9月期间能见度小于500 m的能见度数据和视频图像150时次,小于200 m的能见度数据和视频图像260时次,能见度小于100 m的数据和视频图像110时次,能见度小于50 m的能见度数据和视频图像60时次,剔除车灯干扰明显的图像和无路灯图像。
监测路段视频资料由日照市公安局交警支队提供;监测路段所需能见度监测数据由日照区域自动站和大监站能见度设备监测获取,设备均为“洛阳凯迈CJY-2C/T”型号前散式能见度仪。能见度仪器均距离数字摄像仪1 km范围以内,可对监测路段实时连续监测,每间隔1 min向主服务器回传一次监测数据信息。
1.2 方法
1.2.1 监测方法
目前高速公路尚不具有可供研究的恒定发光目标物视频资料,无法获取不间断路灯监测数据信息。为了研究高速公路团雾的监测方法,选取3处与高速公路条件较为接近的城市快速路进行研究,得到公路团雾的监测预警思路和方法。条件成熟后,建议相关管理部门在全国团雾多发路段安装恒定发光目标物视频监测系统,可实现对高速公路上团雾的监测预警。本研究的视频监测资料来源于布设在城市快速路两旁的路灯设施和摄像设备,通过监测视频可获得图像光亮度参数随能见度变化的信息、团雾尺度范围等信息。利用VSPlayer V7.4.3软件对视频进行等时间间隔图像截取,去除有杂光干扰和无路灯图片后分类存储。运用Adobe Photoshop CS6软件在图像中选取不同区域兴趣窗,测算各个窗口的光亮度参数,各区域的光亮度差及其光亮度标准差。对比分析相应图像区域的光亮参数和水平能见度监测数值关联性,用SPSS软件进行相关性分析和回归分析,建立图像参数与水平能见度模型并验证模型的准确性。
发光目标物视频可实现团雾能见度连续监测预警,根据水平能见度光亮度参数模型计算水平能见度,结合高速公路团雾预警等级的标准[30],可对高速公路出现的团雾天气进行模拟分级预警。
1.2.2 理论分析方法
发光目标物的光亮度传输到人眼或摄像仪包含两个部分:一是发光目标物自身的经过间隔距离的大气消光后的剩余部分;二是大气环境光亮度。夜间的图像大气环境光亮度非常弱,但也存在其他固定光源、移动光源、反射光源的影响,产生异常波动。
I=I0e-σd+If(1-e-σd)
(1)
式(1)中:I为人眼或摄像仪感应到的光亮度;I0为发光目标物的自有光亮度;If为大气环境光亮度;σ为大气消光系数;d为监测点到发光目标物之间的距离[31]。
高速公路团雾天气不同于其他团雾天气,因为高速公路团雾既有水平能见度的限定,又有水平尺度的界定。所谓的高速公路团雾是指“在高速公路上生成或者从周边区域扩散、移动到高速公路上,覆盖高速公路长度小于5 km、能见度小于200 m的团雾”[30]。如果在团雾多发区域能监测到一定间隔距离(50~200 m)的发光目标物,按照上述理论,当发生团雾天气时,人眼或摄像仪获得目标物视亮度会减弱,图像上目标物边缘模糊,其光线经过散射后变得柔和,水平能见度降低到一定阈值后,光域可能会逐渐消失,水平能见度变化越快这种现象会更加明显。
2 团雾视频监测参数计算分析
2.1 公路团雾监测设施的选取
对公路团雾多发路段进行监测时,选择距离摄像仪约50、100、200 m的3处路灯设施,分析不同水平能见度条件下发光目标物的亮度参数,在不同能见度条件下,大气散射系数和消光系数值不同,图像上表现为发光目标物的光亮度强度、光域范围大小、亮度标准差等变化。在不同天气条件下,对亮度参数和水平能见度数值进行相关分析和回归分析获得统计模型。图1为公路边缘摄像仪与路灯设施的示意图,发光目标物数据视频资料通过光纤和无线方式传输到交通管理部门的数据库。
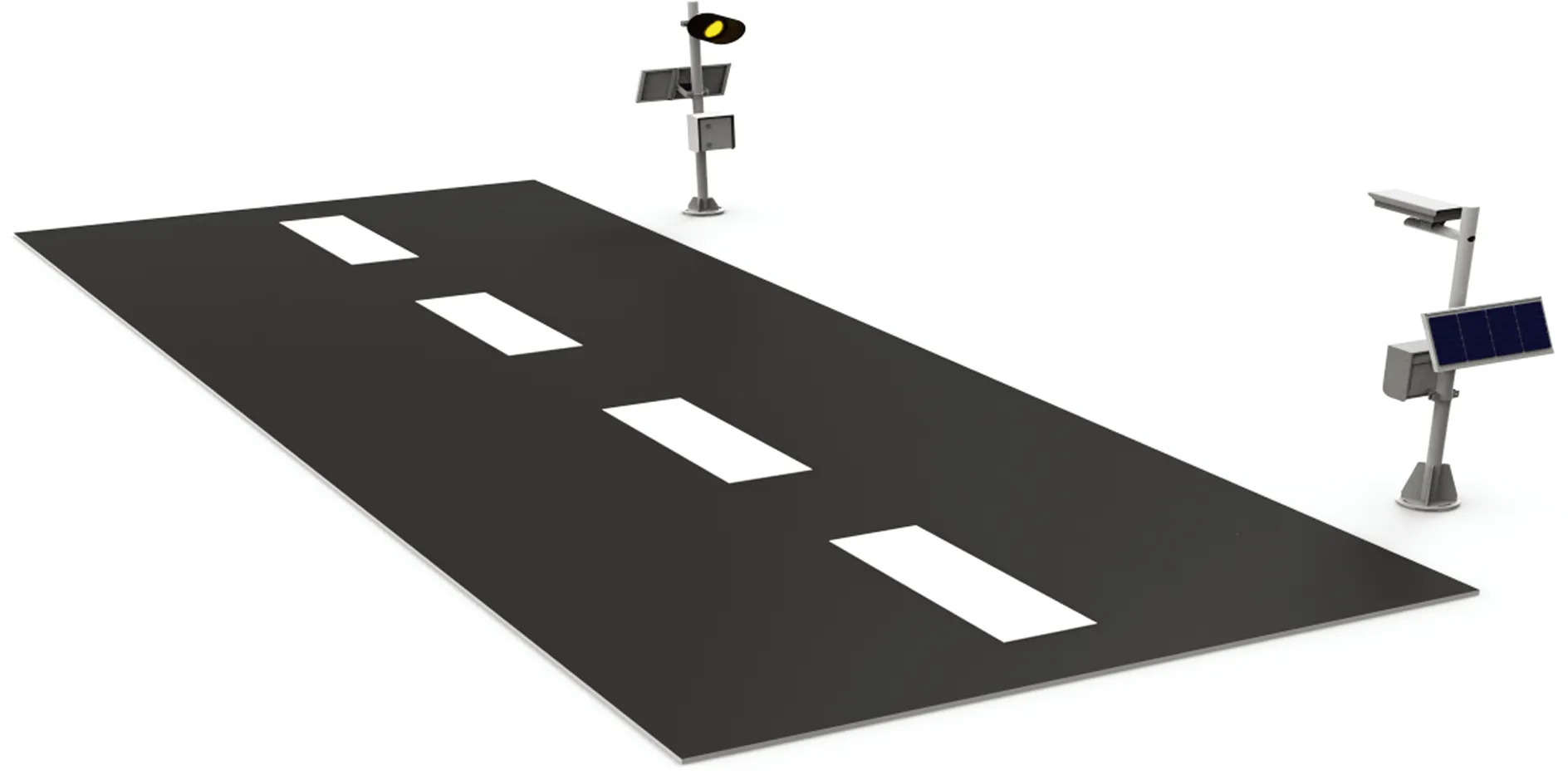
图1 监测设施组成Fig.1 Composition of monitoring facilities
2.2 视频图像特征区域
对视频图像中不同区域的光亮度参数进行计算分析,划分出对能见度变化较为敏感的边缘区域并研究光亮度参数与水平能见度的内在联系。为便于分析计算,选用“矩形框图”限定恒定光源的不同光域范围,并截取图片进行分析。
从沿海快速路团雾天气中,选取水平能见度为200、100、50 m的图像进行分析。分别截取距离摄像仪200、100、50 m的发光目标物光源图片,从中心点向四周查找边缘点,通常位于光亮度标准差异常变动区域,沿着边缘点做4条切线,两两相交后得到矩形;由4条边缘线向内取2行、2列像素,划定区域分别作为光源的边缘区域;以位于两个恒亮光源的中间区域的2列像素为边,依照内环长宽比例画出外部矩形环,可代表环境光区域;经上述步骤得到3个光亮度特征矩形环区域A、B、C,分别代表环境光区域、光域边缘区域和光域中心区域(图2~图4),区域A、B、C是人为划分的3个区域,区域颜色本身没有能见度指示意义,区域A所圈定的范围在图像上位于灯光的边缘以外区域,其光亮度可反映环境光数值变化,区域B所圈定的范围在图像上位于灯光区域与环境光的交界处,其光亮度可反映灯光边缘区域的数值变化,区域C所圈定的范围在图像上位于灯光的中间区域,其光亮度可反映光域中心数值变化。
图2~图4分别为水平能见度200、100、50 m时,50、100、200 m处的光源中心区域C、边缘区域B和环境光区域A的光域亮度、光域范围和光域分布等情况。从图2~图4可见,随着水平能见度降低,光域亮度逐渐减弱;光域范围逐渐减小,直至消失;光域总体分布从不均匀变得比较均匀,边缘光和环境光区域的均匀性变得更加明显。从各分区域看,边缘区域B随着水平能见度变小,光域亮度变暗,光域分布均匀。当水平能见度100 m时,200 m处的光域B基本消失;水平能见度50 m时,100、200 m处的光域B也基本消失。中心区域C随着水平能见度变小,光域面积明显缩小,200 m处的光域C变化最为明显,当水平能见度50 m时,200 m处的光域C已经消失。环境光区域A受光源影响的程度随着水平能见度变小而逐渐降低,当水平能见度降至50 m或光源距离大于100 m时,环境光区域A基本不受光源的影响。环境光区域A的影响因素比较复杂,即使没有这些恒定光源影响,还可能受其他周围杂光的反射、衍射等影响,进而还可能对边缘区域B造成影响。

图2 划分不同距离发光目标物亮度区域-水平能见度200 mFig.2 The luminance region of the luminous object at different distances is divided-horizontal visibility 200 m
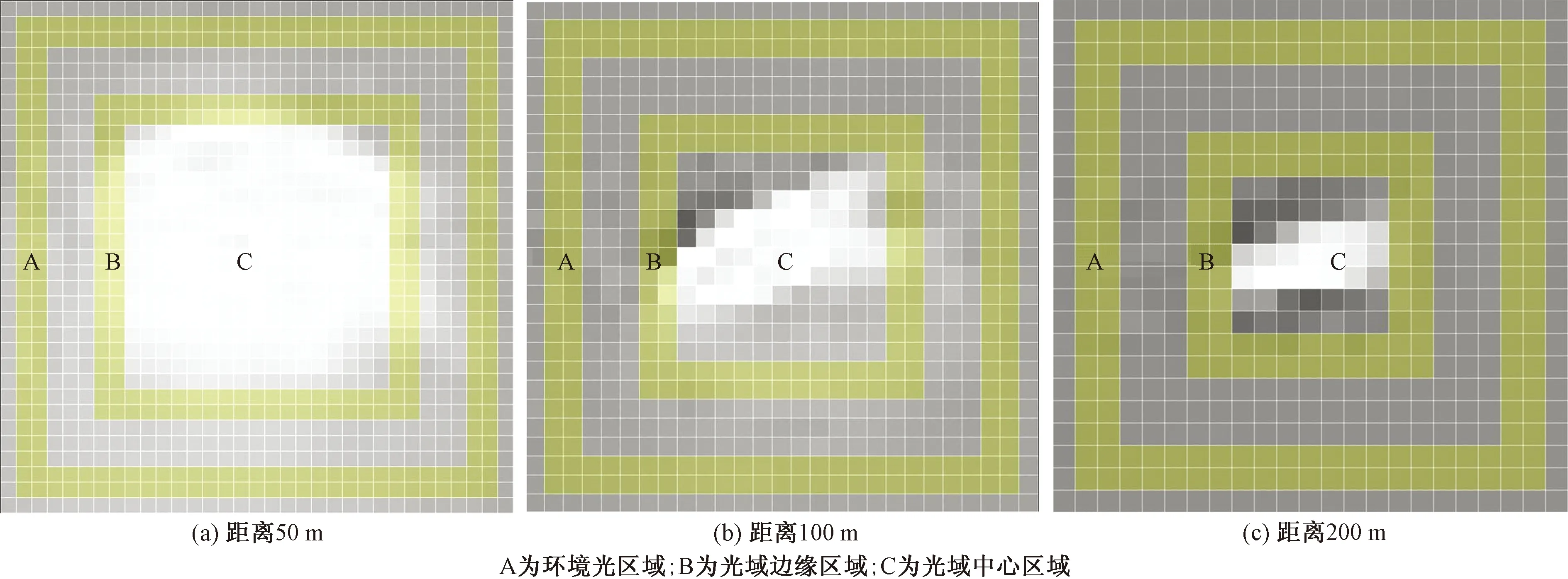
图3 划分不同距离发光目标物亮度区域-水平能见度100 mFig.3 The luminance region of the luminous object at different distances is divided-horizontal visibility 100 m
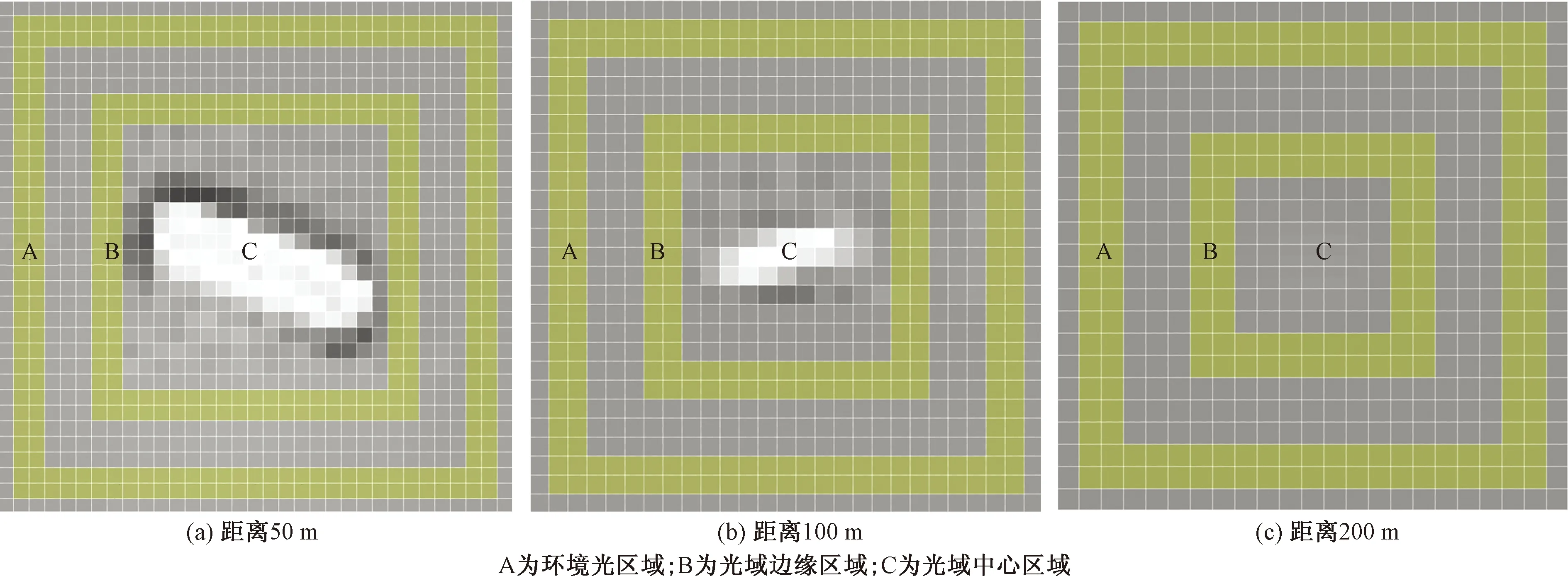
图4 划分不同距离发光目标物亮度区域-水平能见度50 mFig.4 The luminance region of the luminous object at different distances is divided-horizontal visibility 50 m
2.3 视频图像参数计算分析
在每3 min间隔视频中的等时间间隔(图像按间隔5~10 s截取1张)截取图像,在得到的完整图像中再选择裁剪不同距离处(200、100、50 m)的发光目标物光区域图片,分别统计A、B、C 3个特征区域光参数。由于不同水平能见度和环境光条件下,A、B、C 3个特征区域的光线可能分布不均,因而用均值法求得矩形环内光亮度平均值,数学表达式为
(2)
式(2)中:IA、IB、IC分别为距离200、100、50 m处的发光目标物光源环境光区域、光域边缘区域、光域中心区域同一像素点k张图片亮度的平均值;Ik(x,y)为第k张图像(x,y)像素点处的亮度值;N为时段内段截取图像张数,按每3 min选取20~30张图像资料统计分析(去除有车灯干扰图像和无路灯图像)。
用式(3)计算出3个特征区域的平均亮度值,用计算值可评估发光目标物在不同水平能见度条件下,3个特征区域的光亮度变化情况为
(3)
从2020年1—9月期间的视频资料中,筛选水平能见度小于500 m的团雾和非团雾天气,剔除车灯干扰明显和无路灯图像后,共选取水平能见度数值有代表性的35时次进行分析。分别统计分析水平能见度小于200 m的团雾天气视频参数,以及水平能见度大于200 m的非团雾天气视频参数,用附近能见度仪的监测资料作为图像分析的参照数据(由于前散能见度仪本身存在10%~20%的误差,需辅以附近目标物人工观测)。

图5 发光目标物不同能见度的亮度差和标准差Fig.5 Luminance difference and standard deviation of different visibility of luminous object and object
根据图2~图4划定的特征区域的方法,对图像资料划分区域,分析各区域的光亮度参数变化规律,图5为能见度0~500 m时,50、100、200 m处区域光亮度差值(发光目标物边缘区域光亮度与环境光区域光亮度的差值)和光亮度标准差值(发光目标物边缘区域亮度标准差与中心区域亮度标准差的差值)的分析结果,横坐标表示水平能见度,纵坐标表示亮度(灰度)差值,灰度值为黑白图片亮度的相对数值(0~255),无单位名称。从图中可看出,参数值随水平能见度数值变大而逐渐增大,100、200 m处亮度差值增加相较于50 m处亮度差值增加速度缓慢,50 m处亮度差值增加速度较快。亮度标准差值化总体变化趋势为波动上升,表现为与亮度差值同步增长趋势,随着亮度差值的增大,亮度标准差值也相应增大。
图5中,亮度标准差值总体与亮度差值保持较好的一致性,但局部也出现了明显偏离现象,在200 m处能见度小于50 m时,亮度标准差值明显升高,原因可能是路灯中心亮度非常弱,而环境光把原来较暗的路灯边缘局部照亮,从而边缘区域的标准差明显增大;在50 m处能见度500 m附近时,光亮度标准差值出现明显下降,其原因需要进一步探究。从统计资料还可看出,水平能见度小于200 m时,位于200 m处亮度差值都小于或等于10,亮度标准差值都小于或等于0。
图5对水平能见度与光亮度参数进行了初步统计分析,总体上把握其变化规律。得到了亮度标准差值、亮度差值与团雾水平能见度变化的内在联系,为建立团雾分级预警模型奠定数据分析基础。
3 建立团雾分级预警模型
从2.3节分析可知,不同距离处的发光目标物在图像上不同区域的亮度参数变化与水平能见度呈现明显关联性,比较3个特征区域光亮度参数,图像中发光目标物边缘的亮度差值随着水平能见度的减小而减弱,标准差值变化趋于更加平稳。从图5看出,水平能见度与亮度差值(ld)、标准差值(sd)基本存在着一致的线性变化关系,为定量分析水平能见度与亮度参数的关系,另外还需考虑环境光的影响(环境光具有不均匀性,对边缘的影响也具有不均匀性,两者的差值可将这种不均匀性抵消),引入边缘区域标准差与环境光标准差的差值ad(简称环标差值)和中心亮度与环境光亮度差值cd(简称心环差)变量,选用多项式函数进行线性回归分析,建立水平能见度与上述变量之间函数关系式。
按高速公路团雾预警等级[30],只对水平能见度小于200 m的团雾建立预警模型,分别建立距离摄像仪200、100、50 m处发光目标物图像的亮度差值、标准差值、环标差值、心环差与水平能见度线性回归模型。表1给出了距离摄像仪不同距离处发光目标物水平能见度与亮度差值、标准差值线性回归分析结果。从表1可看出,3个函数的复相关系数R都在0.925以上,200 m处的复相关系数R达到0.990,因子和变量间有较强关联性。决定系数R2均在0.855以上,200 m处的回归函数的R2达到0.979,调整后的决定系数R2最低值等于0.833,说明其拟合优度水平较高,模型变量具有较好的解释性,该模型对团雾天气具有更好的模拟优度。
表2为距离摄像仪50 m处发光目标物亮度差值、标准差值、环标差值、心环差与水平能见度(用v1表示)线性回归分析结果。自变量亮度差值、环标差值均通过了显著性检验(t分别为6.708和5.600,p均小于0.01),由VIF可看出,自变量之间不存在共线性。标准化系数表明,亮度差值与能见度之间存在正向变化关系,亮度差值越低水平能见度就越低,反之变大。环境光标准差值也存在正向相关性,环境光标准差值随着水平能见度升高会升高。
距离摄像仪50 m处的水平能见度计算公式为
v1=3.873+2.248ld+4.415ad
(4)
表3为距离摄像仪100 m处发光目标物亮度差值、标准差值、环标差值、心环差与水平能见度(用v2表示)线性回归分析结果。自变量亮度差值、环标差值、心环差均通过了显著性检验(t分别为4.419、-2.305和4.016,p均小于0.01,环境光标准差值小于0.05),VIF表明,自变量之间也不存在共线性。从标准化系数看,亮度差值与水平能见度之间也存在明显的正向变化关系,环境光标准差在回归模型分析结果为负值,环境光标准差随着水平能见度降低会升高,中心亮度与环境光亮度差与水平能见度之间也存在明显的正向变化关系。
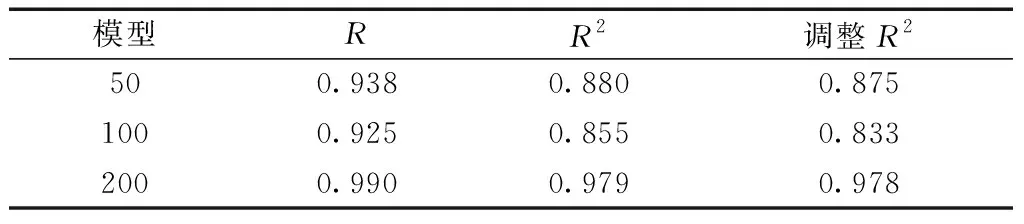
表1 回归决定系数表Table 1 Table of regression determination coefficient
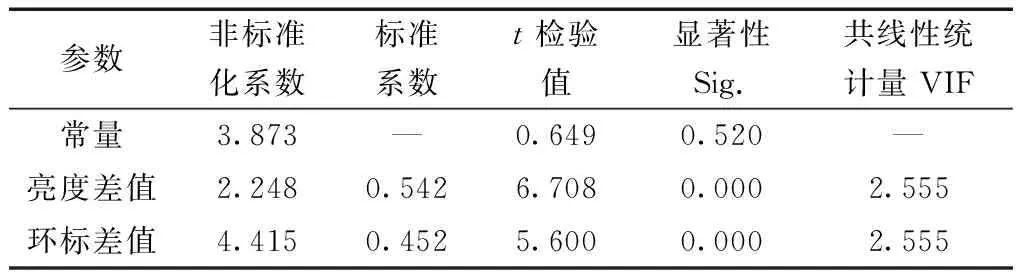
表2 50 m回归分析结果Table 2 Results of 50 m regression analysis
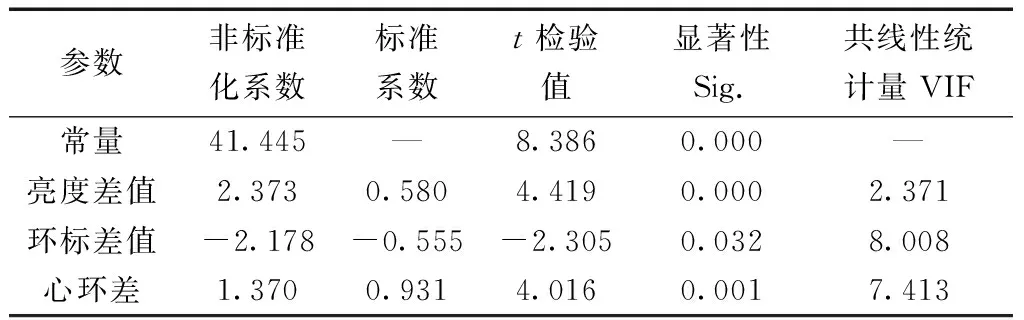
表3 100 m回归分析结果Table 3 Results of 100 m regression analysis
距离摄像仪100 m处的水平能见度计算公式为
v2=41.445+2.373ld-2.178ad+1.370cd
(5)
表4为距离摄像仪200 m处发光目标物亮度差值、标准差值、环标差值、心环差与水平能见度(用v3表示)线性回归分析结果。自变量亮度差值、标准差值通过了显著性检验(t分别为26.271和-5.209,p均小于0.01),自变量之间同样不存在共线性。从标准化系数看,亮度差值与水平能见度之间也存在明显的正向变化关系,标准差值在回归模型分析结果为较小的负向值,标准差值随着水平能见度降低会升高,从图5(c)可看出,能见度大于150 m时,标准差值随着水平能见度升高明显的波动升高。
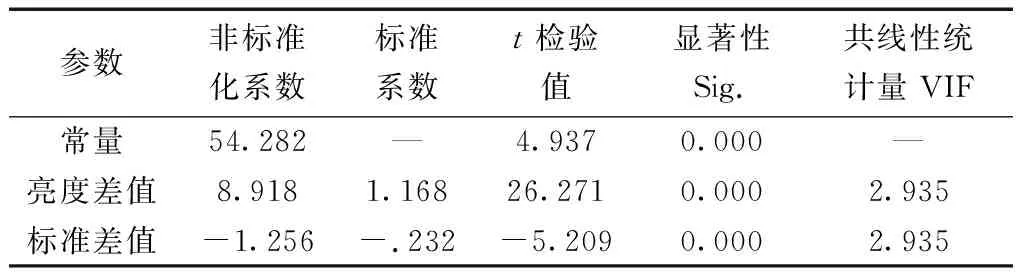
表4 200 m回归分析结果
距离摄像仪200 m处的水平能见度计算公式为
v3=54.282+8.918ld-1.256sd
(6)
在3个回归模型中,亮度差值与水平能见度数值相关性较强,较好地反映了与水平能见度变化。对距离摄像仪200、100、50 m处的发光目标物图像亮度差值、标准差值、环标差值、心环差与水平能见度的回归模型都拟合出了较好的结果,尤其是能见度200、50 m处的拟合效果更好。模型变量具有较好的解释性,利用该模型对高速公路团雾进行模拟监测预警,并检验其准确性。
4 团雾分级预警及模型检验
以上回归模型可嵌入高速公路团雾预警系统,团雾预警系统对监测设施采集的视频图像进行分步骤处理,统计计算图像特征区域的光亮度参数值,进而据回归模型计算200、100、50 m不同距离处的水平能见度,再根据团雾的覆盖区域范围确定团雾预警等级,具体检验流程如图6所示。
本文分级发布的团雾红色预警、橙色预警、黄色预警参照现行的“高速公路团雾预警等级”标准[30],在此基础上进行了细化,发布分级预警标准如表5所示。
团雾的范围是指团雾覆盖的高速公路的长度。参照第3节的回归模型,摄像仪到50 m处目标物之间水平能见度是v1,到100 m处目标物之间水平能见度是v2,到200 m处目标物之间水平能见度是v3,在这里团雾覆盖的高速公路的长度D可用摄像仪与发光目标物(200、100、50 m处)之间的距离分别代替。
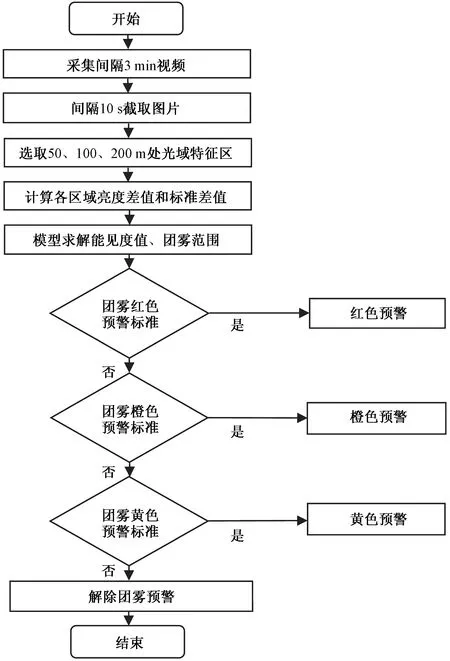
图6 团雾分级预警流程图Fig.6 Local dense fog classification and early warning flow chart

表5 团雾分级预警指标Table 5 Local dense fog classification and early warning index

图7 能见度计算模型检验结果Fig.7 The test results of visibility calculation model
从团雾监测样本中,共计选取31个时次图像资料,分别代表不同水平能见度级别的数据,按照图6所示的流程对模型进行检验,检验结果如图7所示。从检验结果可看出发光目标物视频模拟测算的水平能见度数值与实况数据较为接近,数值误差基本在10%之内。50 m处发光目标物测算的局部(能见度大于90 m)误差超过20%,但其他部分均小于10%,这对于判断红色预警信号等级不会产生影响。
水平能见度小于200、100 m的天气检验效果非常好,数值误差基本均在10%之内。按统计的实况资料,试验路段共计出现红色预警18次、橙色预警10次、黄色预警17次,模型测算结果发送的红色预警正确16次,错误两次(一次空发一次漏发)正确率88.9%;发送橙色预警正确10次,发送黄色预警正确17次,两者正确率均达到100%。以上检验结果说明本文建立的团雾分级预警模型具有较高的准确性,可实现对高速公路团雾监测预警目的。
5 结论与展望
通过对团雾天气下公路固定距离发光目标物视频图像监测、接收、处理,依据能见度基本理论,对图像进行光亮度参数统计分析,配合前散射能见度仪对比校验(并辅以附近目标物人工观测),得到了发光目标物光亮度参数与水平能见度相关性分析结果,进而获得光亮度参数与水平能见度线性回归模型。利用回归模型分别计算出距离摄像仪50、100、200 m处的团雾水平能见度数值,参照“高速公路团雾预警等级”标准确定出团雾路段的预警等级。可用于建立高速公路团雾监测预警平台,可向交通运营、管理部门、交通参与人发布团雾分级预警信息。
发光目标物视频图像团雾监测预警,从一个新的角度切入,并得到了较为精确的团雾水平能见度计算结果,在一定程度上解决了前人研究成果中的视频图像分析难以连续监测预警等问题。发光目标物视频分析技术将来可与GIS分析技术、导航技术相结合,将形成及时、准确的高速公路团雾分级预警体系。发光目标物视频图像团雾监测预警模型将会成为高速公路团雾监测预警的主要方法之一。
由于中国的路灯照明设备还没有统一的标准,各地公路使用的摄像仪器型号也不尽相同,甚至摄像仪器和发光目标物的水平、垂直角度也各不相同,根据上述方法得到的回归模型会存在较大差异。本研究的目的在于从一个新的视角探讨监测预警高速公路团雾的思路和方法,各地应根据实际监测资料统计分析,获得适用于当地实际情况的高速公路团雾监测预警模型。无论得到何种预警模型,将来模型都需要在实践中检验,其稳定性和精确性仍需在应用中加以完善。
