基于Ansys Workbench的龙门架机械手结构动力学分析
2023-01-11郭北涛代国辉
郭北涛,代国辉
(沈阳化工大学 机械与动力工程学院, 辽宁 沈阳 110142)
如今,工业制造生产中工业机器人随处可见。龙门架机械手做为工业机器人的一种,具有高扩展性、超大行程、高负载性、高效率、寿命长等优点,广泛应用于工业生产中[1-3]. 在使用过程中,共振现象会对龙门架机械手产生极大危害,应避免在共振频率下工作。本文通过建立龙门架机械手的三维模型进行分析,得出在外界激励下龙门架机械手的危险工作频率,以指导工业生产。
1 建立龙门架机械手有限元模型
1.1 三维模型建立
利用SolidWorks建立龙门架机械手的三维模型,如图1所示,通过x、y、z方向的移动定位并抓取工件。由于复杂的模型会导致Ansys Workbench分析计算量变大,也会导致求解出错[4],故将龙门架机械手三维模型进行简化处理,简化后的龙门架机械手模型见图2.
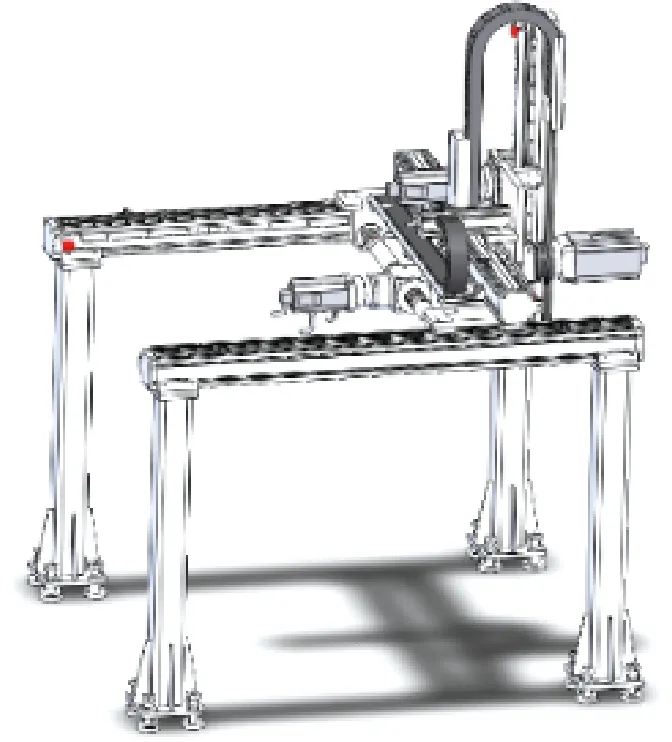
图1 龙门架机械手模型图
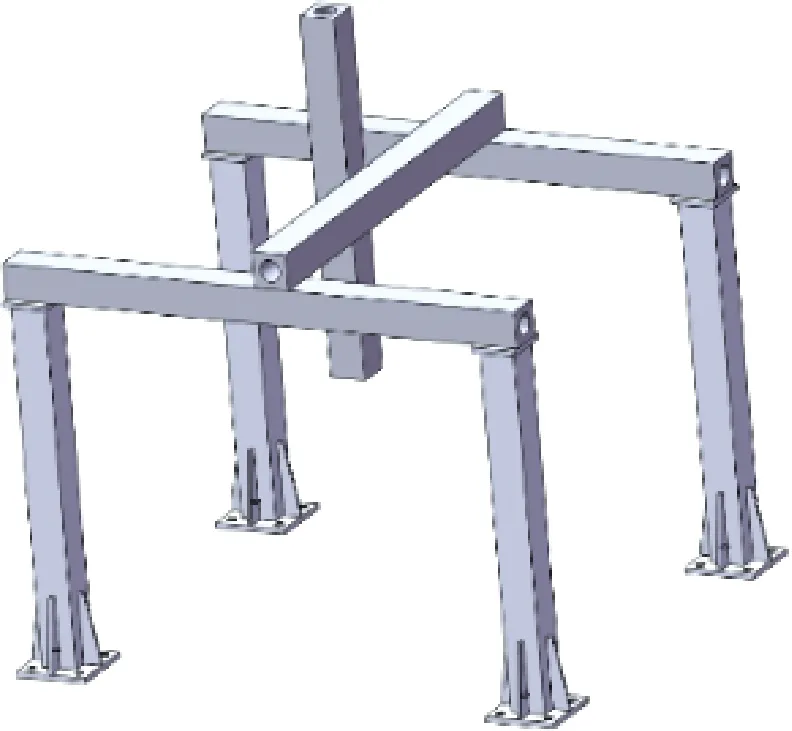
图2 简化后模型图
1.2 有限元模型建立
将简化后的龙门架机械手模型保存为.step格式并导入workbench里的modal(模态分析)模块中。先在材料库中定义所需的材料,本文研究的龙门架机械手4个支撑腿定义为结构钢,其余x、y、z轴机械架定义为铝合金。网格划分尺寸设置为10 mm,既保证了求解精度,也减少了计算量,求解后共有309 531个节点,89 196个单元。
2 模态分析
工业制造设计中,可以通过模态分析方法,提前对设计工件的结构振动进行初步了解,从而避免工件发生共振现象,使工件内部结构损坏。同时,可通过模态分析的结果,对工件进行结构优化,达到使用寿命更长,结构更坚固的要求。
将网格划分后的有限元模型添加约束,本文是对4个支撑腿添加圆柱形支撑,见图3. 忽略预应力,将求解最大模态阶数设置为10阶,求解后得出的龙门架机械手前十阶固有频率见表1.
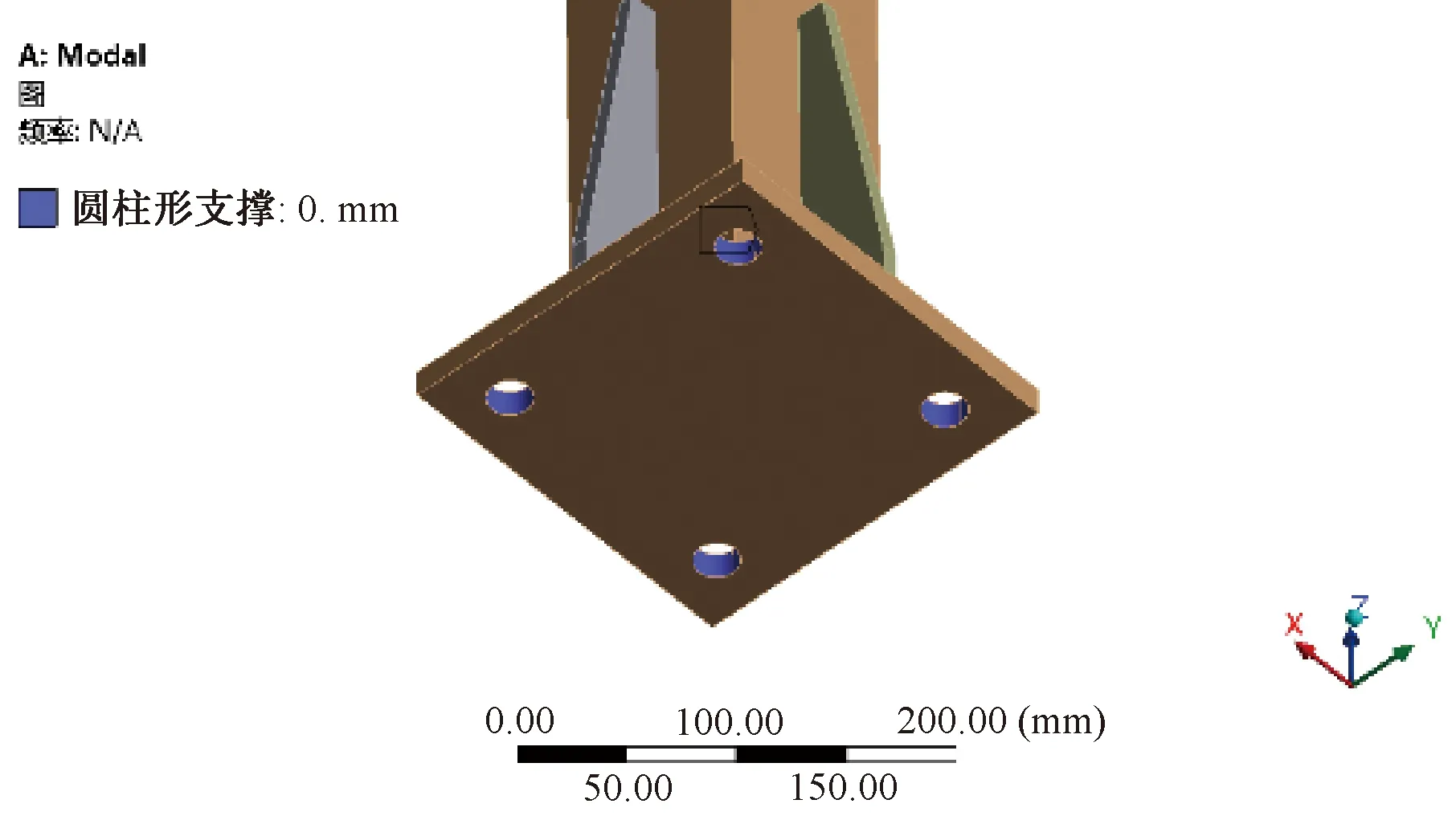
图3 一阶振型模型图

表1 前十阶固有频率表
一般情况下,机械结构受低阶频率影响较大,因此,选取前六阶模态振型作为分析对象[5]. 前六阶模态振型图见图4,5,6,7,8,9.

图4 一阶振型图

图5 二阶振型图
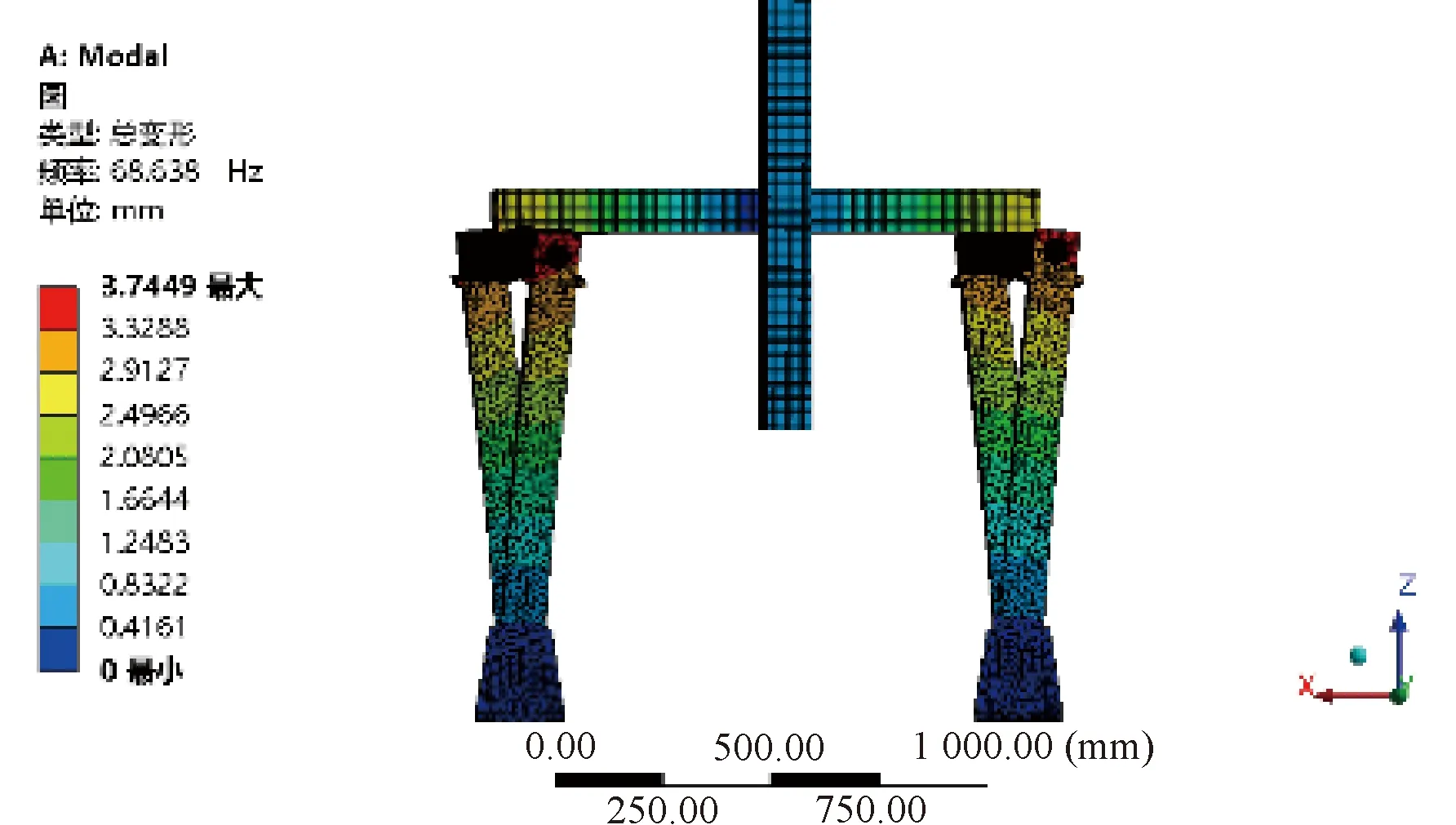
图6 三阶振型图
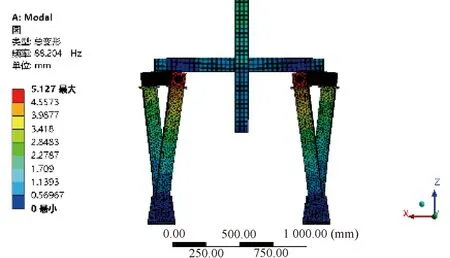
图7 四阶振型图

图8 五阶振型图
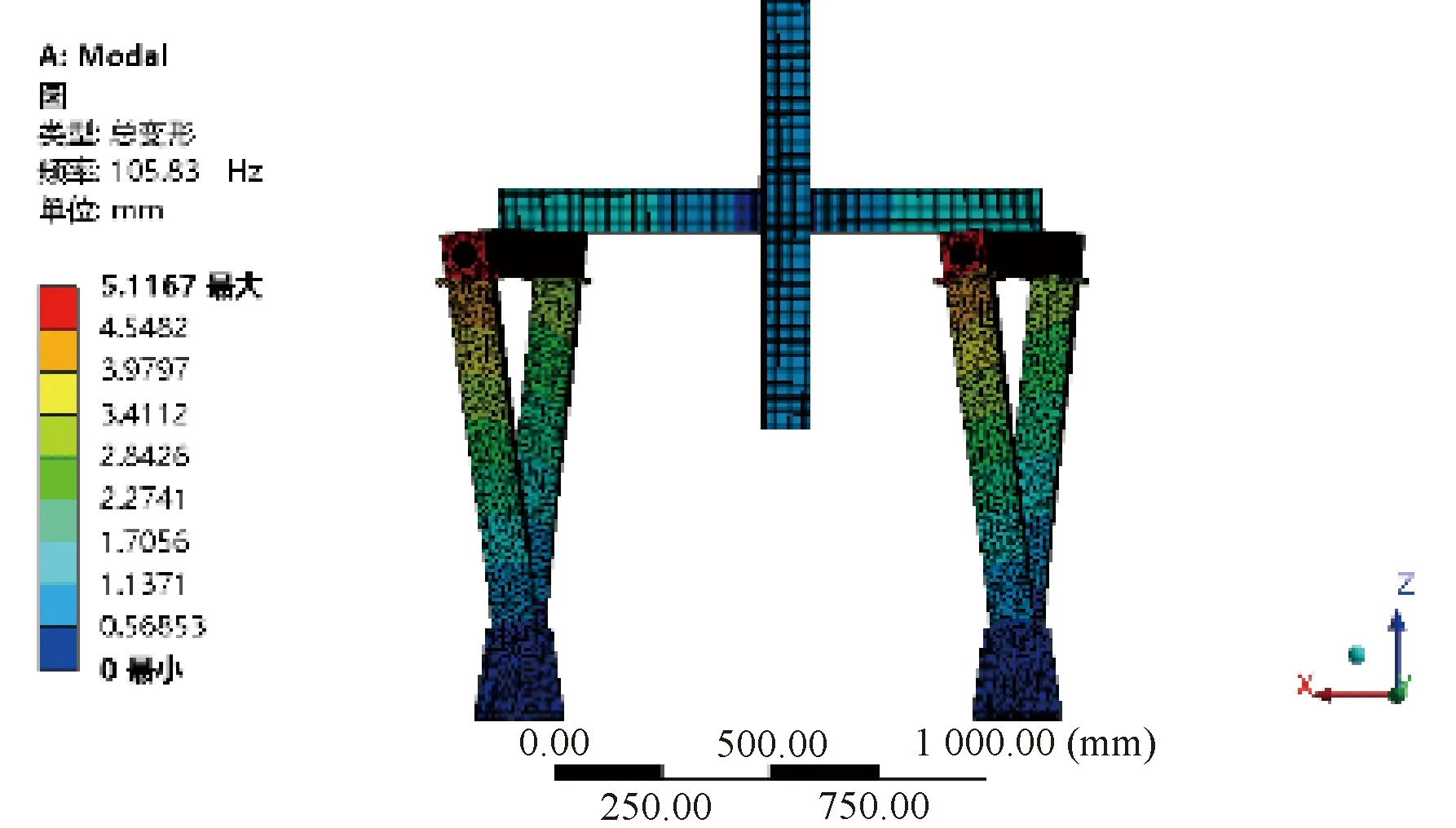
图9 六阶振型图
由图4—9可以看出,一阶、二阶、五阶振型图主要以弯曲变形为主,其中一阶振型是4个支撑腿向x方向弯曲,最大变形量为3.137 mm;二阶振型是4个支撑腿向y方向弯曲,最大变形量为3.540 mm;五阶振型是z轴机械手弯曲,最大变形量为9.350 mm. 三阶、四阶、六阶振型图以扭转变形为主,其中三阶振型是向x负方向扭转,最大变形量为3.744 mm;四阶振型前面两支撑腿向内侧,后面支撑腿向外侧,最大变形量为5.127 mm;六阶振型是向x正方向扭转,最大变形量为5.116 mm. 由上可知,五阶变形量最大,实际工作频率中应避免。
3 谐响应分析
模态分析得出的工作危险频率是在龙门架机械手各部件之间的振动,并没有外界激励的情况,而在实际工况中外部激励是不可避免的。为了确定施加外部激励后龙门架机械手的振动情况,采用谐响应分析法,对龙门架机械手施加简谐力的振型进行求解,从而更加准确地确定龙门架机械手的危险工作频率。
在模态分析的基础上,将Harmonic Response模块与Modal模块求解的数据进行关联,模态分析最大固有频率应大于谐响应分析最大频率的1.5倍,模态分析求解出的第十阶固有频率为170.75 Hz,则谐响应分析的最大频率设置为100 Hz,求解方案间隔设置为100,则谐响应分析扫描频率是1~100 Hz. 本文龙门架机械手夹取工件为15 kg,故在z轴机械手上施加150 N的力,见图10.
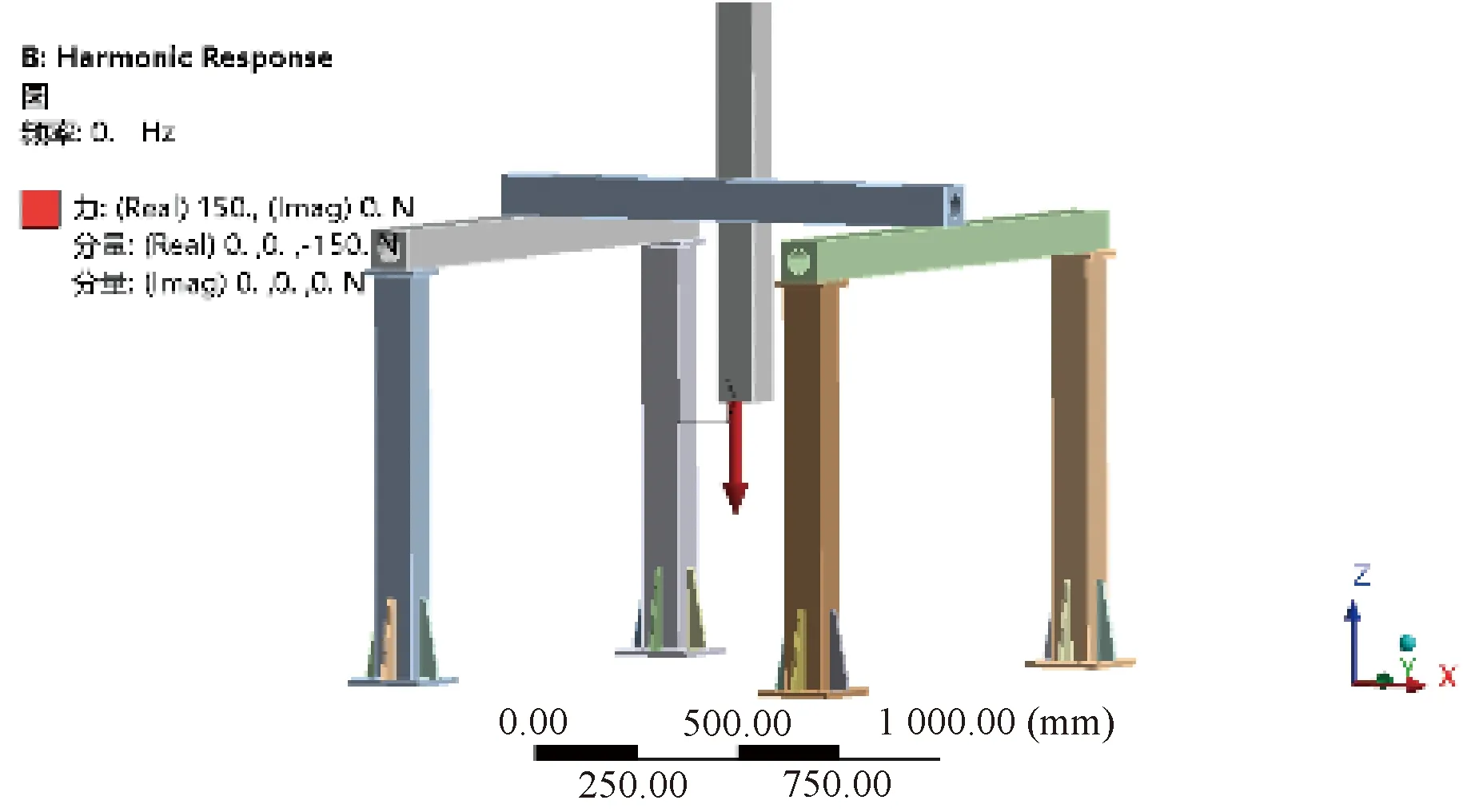
图10 施加简谐力图
分别求解龙门架机械手在x、y、z方向的频率响应变形图,图11、12、13分别为x、y、z方向频率响应位移图,其中x方向振幅为3.644×10-6~9.8×10-3mm;y方向振幅为8.858×10-5~9×10-2mm;z方向振幅为2.662×10-3~1.159 mm. 由图11可以得出龙门架机械手在x方向最大振幅发生在39 Hz,最大振幅为0.009 8 mm,十分接近一阶固有频率;在y方向最大振幅发生在95 Hz,最大振幅为0.09 mm,与五阶固有频率接近;在z方向最大振幅也发生在95 Hz,最大振幅为1.159 mm,接近五阶固有频率。故在外界激励下,龙门架机械手在一阶、五阶固有频率下容易发生共振,造成工件损坏,而且在z方向变形量最大。因此,实际使用中应避免一阶39.02 Hz、五阶95.08 Hz频率范围。
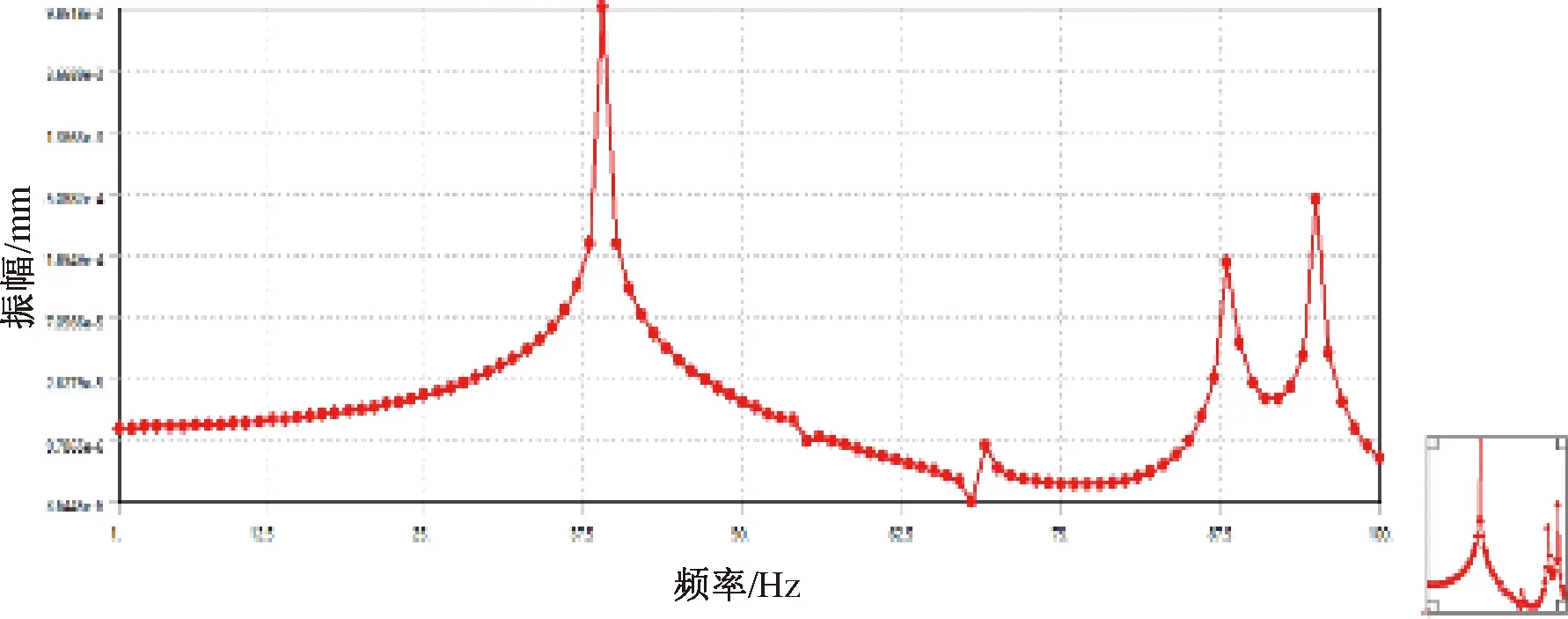
图11 x方向位移响应曲线图

图12 y方向位移响应曲线图

图13 z方向位移响应曲线
4 结 论
本文通过利用SolidWorks建立龙门机械手的三维模型,将模型简化后进行有限元动态特性分析,经模态分析后求解出龙门架机械手前十阶固有频率及各个频率对应的振型图,其中五阶固有频率变形量最大。最后再利用谐响应分析法,求解龙门架机械手在外界激励情况下的频率位移关系图,从而得出危险工作频率,实际工作中应避免二阶固有频率39.02 Hz、五阶固有频率95.08 Hz.
