基于电子地图的D*补偿算法AGV路径规划*
2023-01-06杨光永徐天奇黄卓群戈一航
程 满 杨光永 徐天奇 黄卓群 戈一航
(云南民族大学电气信息工程学院 昆明 650500)
1 引言
自动导引车(Automated Guided Vehicle,AGV)随着智能化的发展,在智能仓储和室内搬运中发挥越来越大的作用[1]。路径规划作为AGV的核心之一,合理的路径规划是智能车辆不可或缺的一部分,决定了智能车辆的安全性和稳定。传统几何方法中的几何法,例如可视图法[2]、沃罗诺伊图法、自由空间法等计算量大、路径不是最优;单元划分法,缺点是单元分解与计算单元之间的邻接关系的开销较大;人工势场法,实际上是一种拟物方法,模拟自然界中的静电场、流体等,缺点是容易陷入局部最优而无法完成任务[3~5]。智能算法主要包括模糊逻辑算法[6]、神经网络算法、遗传算法、蚁群算法、模拟退火等,智能算法[7]普遍存在着对计算机要求高,收敛速度慢、控制变量多之类的缺陷[7]。D*算法是在图搜索的思维下发展的智能启发式算法[8],原理简单,容易实现,D*算法是A*算法的扩展,与A*算法中有向静态弧长(结点与结点之间的代价)的定义不同,D*算法结点之间的弧长代价可以随算法的实施进程而动态变化,即动态A*算法(Dynamic A*),D*算法由此得名,不同在于D*是从目标点到起点的反向搜索。文献[9]对于地图进行分区以及子节点的改进,实现在不同区域不同搜索,并用Floyd算法平滑处理,保证了效率的同也实现了很好的避障效果。文献[10]考虑到了AGV的尺寸大小和位姿对行驶的影响,采用改进的遗传算法对A*算法产生的初始路径进行优化。文献中所提出的方法,在一定程度上实现了很好的效果,但是有一些缺陷。比如障碍物的突然出现,这些算法就不能实现很好的预期效果;以及改进后的算法相较于之前的算法而言,有时损失了例如路径最优、规划时间短等方面来满足某些方面的优势。对于以上的问题,本文提出了D*补偿算法,在不损失最优路径的同时也能很好的实现避障功能,以及考虑到了实际行驶情况,特别注意转弯次数多的问题。
2 补偿D*算法
2.1 距离表达
D*算法原始的距离计算公式是欧氏距离(Euclidean Distance)表达式如下:

由于原始距离要进行平方项和开方处理,速度慢。现在换成曼哈顿距离(Manhattan Distance)表达式如下:

2.2 启发函数
D*是一种启发式搜索算法,D*估价函数如下:


图1 节点的转弯判断

对g(n)累计代价做改进,将转弯次数这个要素也参考进去。提出g'(n),λ和c(n),c(n)与AGV行驶过程中转过弯的次数成正比,λ代表转过的弯次数,g'()n表示新的累计代价,本文中正比的这个比例设置为10。

2.3 平滑行驶
基于实际行驶,AGV遇到大转弯时候不可能停在原地,然后转大弯操作,这样操作性不强,对本身运行非常危险。因此在行驶中我们更希望AGV行驶的路径是一个圆滑的路径,平缓的从起点走到终点。假设平滑之前的点为[x1,x2,x3,…,xn-1,xn],平滑之后的点为[y1,y,y3,…,yn-1,yn]。本文中α表示偏离度,β表示平滑度,为了得到最佳的效果本文的α和β都设置为0.5,迭代次数为9次,可以得到最优的平滑行驶路径。

图2 路径平滑对照图
路径平滑的实质是求解y(i)满足两种距离的最小:

最小化目标为

求解采用梯度下降法(gradient descent),多次迭代,调整y(i)使得目标函数取得最小值,初始化y(i)=x(i),迭代:

2.4 安全行驶
长度小的障碍物,直接采用圆形进行包围,损失的可行路径比较小。外包圆直径取障碍物的顶点连线的最大值,圆心为最大连接线的中点。

障碍物在极坐标下形成的曲线表示为


图3 障碍物圆形包围膨胀
加入的电子地图障碍物是矩形,建模时膨胀矩形即可,可以节约大量的可行路径,在两障碍物中间不会判断为不可行区域。参照Costmap的栅格空间覆盖枚举的改进型方法的思想,简单的划分为Freespace(自由层)和Lethal(致命层)。膨胀的度设置为0.5个单元栅格大小。
3 总的结构流程图
图4流程图节点nij,邻近点nrs,优先队列open和closed,每一个节点nij分配的状态标志是(tnij)累计代价g(n),提出新的累计代价g'(n)。

图4 矩形障碍物矩形膨胀
4 改进算法的仿真结果分析
对比仿真实验的起点位置都设置为start=(7,3),终点位置为goal=(23,10),横坐标为x轴,纵坐标为y轴。
4.1 算法的比较
图9算法在迭代次数上面相较于图8算法来说并没有优势,但在转弯次数的减少,以及路径的减少有较明显的区别,实现了较优的改进。实际生活中的AGV的行驶,走曲线可以维持速度在一个更稳定的范围之内移动,到达目标点的耗时反而短一些。图9算法还有一个显而易见的优点就是与障碍物有一定的安全距离,满足安全行驶的要素。按照设置的预计代价函数,计算新的路径,主要考虑了转弯次数的问题,图9算法相对于图6-8算法,行驶的路径长度减少,图9算法路径长度相较于图8算法减少了25.5%,转弯次数减少了50%。

图5 结构流程
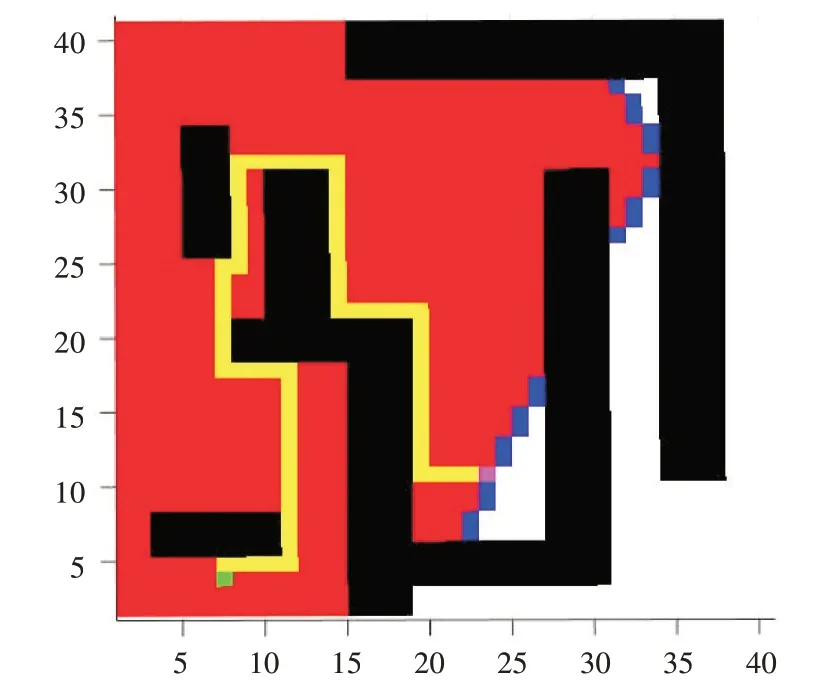
图6 Dijkstra算法规划的路径
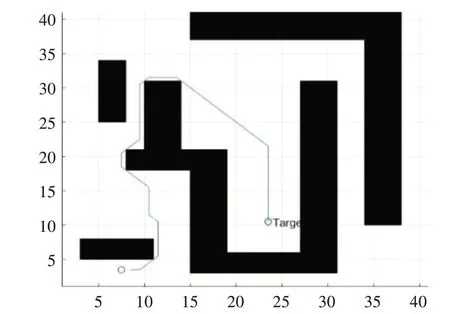
图7 A*算法规划的路径

图8 D*算法规划的路径
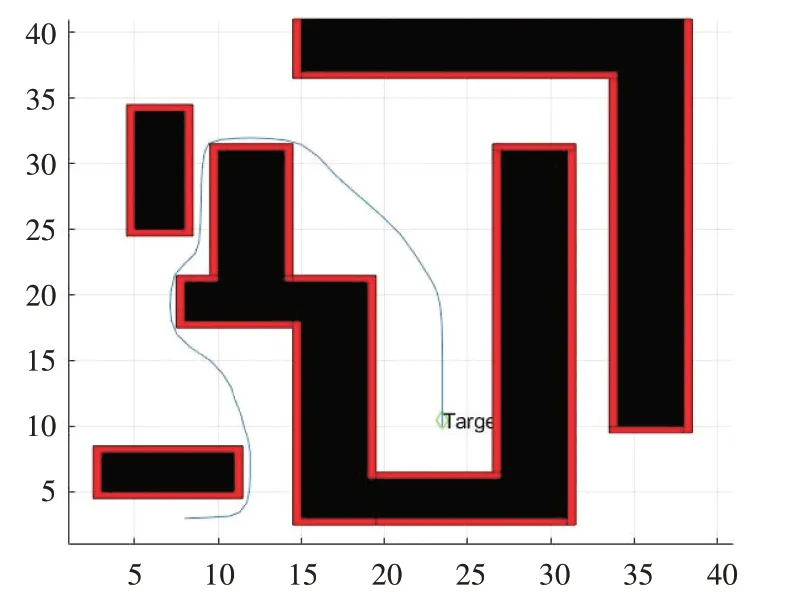
图9 D*补偿算法规划的路径
4.2 临时障碍物
在遭遇临时障碍物的情况下,图11中的算法依然可以很好地避开障碍物,同时与障碍物保持一定的安全距离,相较于图10中的算法,转弯的次数减少了,行驶更短的路径。
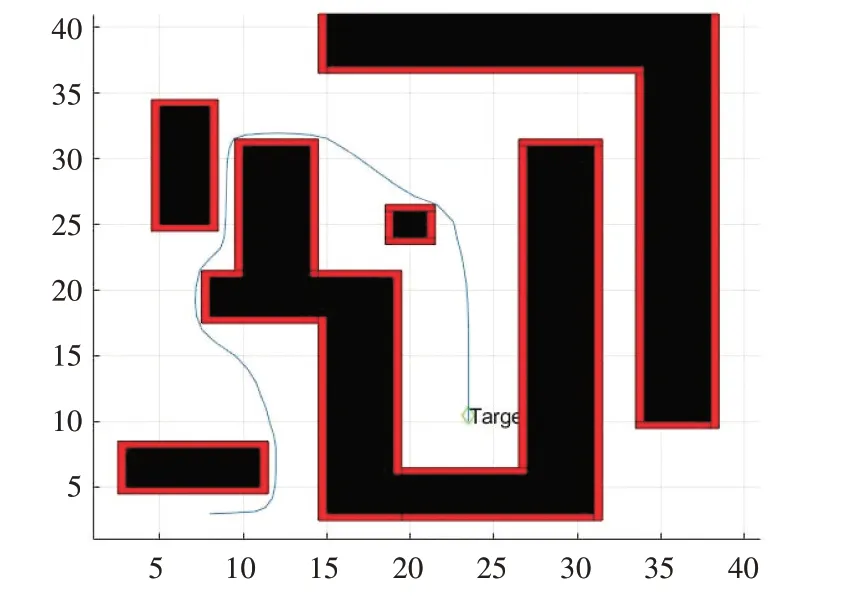
图10 D*算法遭遇障碍物的路径

图11 补偿后的D*遭遇障碍物的路径

表1 图5~8的参数比较
5 结语
补偿后的D*算法在路径规划问题中考虑了转弯因素的影响,补偿后的算法有效地避免了行驶路径与障碍物的距离过于接近,保证了AGV的安全行驶,更好地满足了实际的行驶需求。在Matlab上完成了补偿后D*算法的仿真,并和Dijkstra、A*、D*算法进行了比较,验证了安全性和行驶路径减小。在后续的工作中将探索算法在硬件上的实现,如何更快速度地完成规划过程。
