可收折超视距雷达车抗风倾覆稳定性分析
2023-01-05方子帆杨艳丽陈智会
方子帆 周 宇 杨艳丽 陈智会 余 亮
(1.三峡大学 水电机械设备设计与维护湖北省重点实验室,湖北 宜昌 443002;2.三峡大学 机械与动力学院,湖北 宜昌 443002;3.湖北中南鹏力海洋探测系统工程有限公司,湖北 宜昌 443005)
机动式超视距雷达车集信号监测与机动化于一体,可实现在设定区域快速完成监测平台的搭建与撤收.其工作时可在短时间内通过天线升降杆将天线举升至一定高度,以增强其探测范围;工作结束后可将天线快速降下,使整车外形轮廓尺寸满足交通运输的限高要求.
由于机动式超视距雷达车一般工作在沿海地带附近,经常会遭遇强风天气,风载荷是机动式雷达车所承受的主要外加载荷,其所产生的力矩对雷达车的稳定性有很大影响[1].在车载雷达的抗倾覆设计分析中,目前的研究主要集中在对抗倾覆支腿的设计及强度校核[2];对于超视距雷达车的抗风性能分析,一般将风载荷简化为静载荷.而风载荷具有很强的随机性,受风压高度变化系数、风载荷体形系数等因素的影响,必须通过载荷分析以确保系统强度、刚度及整车系统稳定性满足工作要求.
针对某新型机动式超视距雷达车的收车状态及雷达作业状态抗风性能进行分析研究,结合风载数值模拟、仿真分析及数值计算,且引入随机风载荷,建立了一套系统的超视距雷达车抗风性能分析流程,并通过仿真分析其是否满足安全作业不倾覆性能要求.
1 仿真模型的建立
图1为一工作在沿海附近的某新型机动式超视距雷达车.该车主要由液压支腿、天线升降杆、信号接收器、监测调控平台、轮胎、悬架、车身等部件组成.在遭遇极端天气时,主要依靠4个液压支腿支撑工作.在收车状态可将天线取下,液压支腿及天线升降杆为收缩状态,以便于行走.

图1 新型机动式超视距雷达车
超视距雷达车抗倾覆稳定性的分析主要为在外加风载荷的作用下收车和雷达作业两种状态,系统抵抗倾覆的能力.因超视距雷达车收车状态与雷达作业状态的主要区别在于轮胎是否受力,而轮胎属于弹性体,故对两种状态分别建立仿真模型.
1.1 收车状态仿真模型
收车状态指超视距雷达车停放时,顶端天线取下,天线升降杆收缩到车体内部,4 个液压支腿处于收缩状态,仅靠6个轮胎与地面接触的状态.
在仿真实验过程中,建立正确且合理的整车模型,须以一定的简化原则对整车系统进行简化,其主要简化原则如下:1)除轮胎与悬架外,其余组成部件均视为刚体,在仿真过程中发生的变形不予考虑;2)忽略车体的装饰细节、圆角等几乎不影响结构受力分析的修饰性结构特征;3)预留出轮胎及悬架位置,便于在Adams中进行分析研究;4)将结构及作用相似的构件合并为一个整体,以减少模型特征总数.
轮胎与悬架是雷达车的重要组成部件.轮胎直接与路面接触,保证轮胎与路面有良好的附着性;悬架是保证车轮与车体之间具有弹性联系并能传递载荷、缓和冲击、衰减振动等有关装置的总称.轮胎及悬架模型的建立对于仿真具有关键作用[3],在Adams中调用相应的Fiala轮胎模型,通过位置捕捉分别将6个轮胎模型装配到雷达车前后两轴的相应位置,并依据雷达车相应参数添加质量、转动惯量等相关参数;调用路面文件,并设置悬架刚度及阻尼系数,搭建完成的收车状态仿真模型如图2所示.

图2 收车状态仿真模型
1.2 雷达作业状态仿真模型
雷达作业状态指在极端天气条件下,超视距雷达车依靠4个液压支腿支撑工作,轮胎刚好离地不受力,天线及天线升降杆升起的状态.
超视距雷达车原装配体零部件个数繁多,整体模型繁琐复杂,在进行雷达作业状态仿真分析前,必须先将其进行适当的简化.但对于一些主要的承载部件不能简化,在建模时必须保留车体的外形轮廓尺寸及质量基本不变,保留其原始的迎风面积和车体质心,这样才能有效反映其受风载荷下的力学特性及应力分布情况.在SolidWorks中建立超视距雷达车与地面的仿真三维模型如图3所示,其各组成部分材料属性参数见表1.

表1 各组成部分材料参数
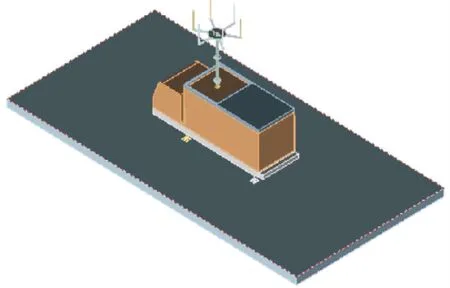
图3 雷达作业状态仿真模型
1.3 抗风指标
抗风性能指标要求如下:1)收车状态:在10级风载正常停放不倾覆;2)雷达作业状态:在10级风载不依靠液压支腿可安全作业.
2 风基本特性及风载荷的计算
2.1 Davenport风速描述方法
大量资料表明,风速基本是随时间和空间变化的平稳随机过程,主要包含长周期和短周期两种成分.其中,长周期在十分钟以上,而短周期通常只有几秒至几十秒.在工程实际应用中,瞬时风速可看成平均风速和脉动风速的叠加[4].
平均风速随地面高度变化的曲线一般采用对数律或指数律来描述,其中指数律表达式为:

式中:z、vz为离地高度及该高度处的平均风速;z10、v10为标准高度(离地高度10m)及该处的平均风速;α为与地面粗糙度相关系数.
脉动风周期与工程结构的自振周期较为接近,对结构具有动力作用,需按随机载荷进行分析.研究构筑物抗风性能时,多以脉动风速谱为切入点.根据规范及工程应用中一般采用Davenport谱,其表达式为:

式中:Sv(f)为脉动风速功率谱;f为脉动风频率;k为反映地面粗糙度的系数.
2.2 风载荷计算公式
当风在流动过程中受到建筑物或构筑物的阻挡,风对其所产生的压力即为风载荷[5].由于自然环境本身的复杂性,风载荷具有较强的随机性,一般需基于数值统计数据并结合经验公式或风洞试验进行计算.参考《建筑结构荷载规范》 (GB50009—2012)[6],其表达式为:

式中:ω为风载荷标准值;βz为高度z处的风振系数;μs为风载体型系数;μz为高度z处的风压高度变化系数;μr为重现期调整系数;ω0为基本风压;v0为基本风速;ρ为空气质量密度.
将在Matlab中模拟所得不同等级的随机风载荷等效为作用力:

式中:F为风的作用力;A为作用部件的投影面积.
2.3 风载荷数值模拟
在Matlab中采用自回归模型(Auto-Regressive,AR)计算模拟不同等级不同高程的时程风速(以10级风为例)如图4所示,其模拟的主要参数见表2.

表2 AR 法模拟风载主要参数

图4 不同高程10级风速时程
将模拟所得风速谱与目标Davenport谱进行对比(以10级风4.9m 处为例),如图5所示.从图5可以看出,模拟所得风谱与目标Davenport谱基本吻合,表明AR 法数值模拟的合理性.

图5 4.9m 处10级风功率谱对比
为了便于抗风性能分析,基于规范求出各风载荷系数,得到10级风不同高程风载荷时程曲线,如图6所示.

图6 不同高程10级风载时程
3 抗风性能分析
3.1 收车状态抗风仿真分析
在Adams动力学仿真过程中,将收车状态模型赋予材料属性及约束定义;分别对车头质心位置及车身质心位置施加等效作用力;仿真时间设置为200s;提取不同等级风载荷下车体质心倾斜角度数据,如图7~8所示.

图7 10~13级风载下车体质心倾斜角度
由图7可以看出,该超视距雷达车在10~12级风载荷下均未发生明显倾覆现象;在13级风载荷下,其车体质心角度过大,可能发生倾覆,基于理论力学及经验公式,建立13级风载荷下的临界动力学方程:

式中:F1为模拟所得13级风况下最大风载荷;hf为风载荷作用等效高度;m为新型机动式超视距雷达车质量;g为重力加速度;hm为车体质心距地面高度;l为1/2轮距;θ为临界角度.
在10~12 级风载荷下,车体质心角度分别在0.7°、0.8°、0.92°附近波动,未发生倾覆现象;在13级风载荷下,车体质心倾斜角度最大达到了8.54°,经计算在模拟所得13 级风载荷下,临界角度约为9.4008°,因风载荷具有极大的随机性,此时已为极危险状态.为验证仿真的科学性,对14级风载荷也进行了仿真分析,如图8所示.由图8可以看出,在14级风载荷下,超视距雷达车已发生倾覆.在10级风载荷下,收车状态,超视距雷达车车体质心最大倾斜角为1.47°,未发生倾覆.

图8 14级风载下车体质心倾斜角度
3.2 雷达作业状态抗风性能分析
考虑超视距雷达车的结构特征、受力特点等因素进行网格划分.对于结构中的天线升降杆及车体的支撑腿,选择划分网格单元为六面体实体单元Solid186,网格尺寸为30mm.对于车体,选择划分网格单元为四面体实体单元Solid187,网格尺寸为100 mm,网格划分完成所包含的节点个数为196523,单元个数为86125.
采用时域法对超视距雷达车进行风振响应分析,以得到较完整的结构动力响应过程信息.在有限元仿真中,分别将模拟所得的不同等级不同高程风压载荷(取前60s)分别施加到各组成部分[7],将地面固定,支腿与地面之间添加摩擦约束,并施加相应约束,如图9所示.

图9 超视距雷达车边界条件
分别提取10级风载荷下风振响应时程分析的最大偏移、最大等效应力云图(为便于观察,将其变形放大30倍)及其时程响应曲线,如图10所示.

图10 10级风载荷下风振响应时程
由图10可知,在10级风载荷下,雷达车最大偏移量为53.364mm,发生在天线顶端位置;等效应力最大位置出现在背风面支腿与车体连接处,且最大值为77.351MPa,未超过天线升降杆的许用应力,10级风下天线升降杆未破坏.
超视距雷达车倾覆的本质是风载引起的倾覆力矩大于车体重力产生的抗倾覆力矩[8].倾覆力矩及抗倾覆力矩的表达式如下:


式中:MC为倾覆力矩;An为各组成部分的迎风面投影面积;zn为各组成部分中心的离地高度;MR为抗倾覆力矩;L为车体质心距抗倾覆支腿的力臂.

图11 超视距雷达车载荷示意图(单位:mm)
各组成部分的中心离地高度分别为1.7、4.9、7m;新型机动式超视距雷达车总质量11850kg,抗倾覆力臂 1.1m;分别取10~12级的最大风载荷[9],评估新型机动式超视距雷达车的抗倾覆能力如下:

提取各个支腿受不同风载荷下的支反力时程响应如图12~15所示.

图12 各等级风况迎风面前支腿支反力

图13 各等级风况迎风面后支腿支反力
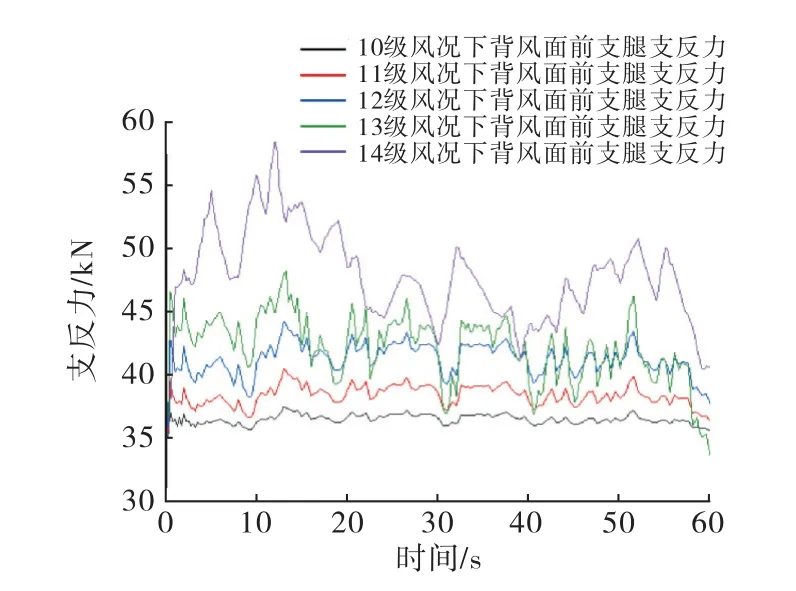
图14 各等级风况背风面前支腿支反力

图15 各等级风况背风面后支腿支反力
观察到超视距雷达车迎风面的后支腿率先离地,10级风载荷下雷达车未发生倾覆现象,13级风载荷下雷达车迎风面后支腿在13s左右时发生离地现象,各支腿支反力出现不稳定现象.10级风载荷下,超视距雷达车各支腿均存在支反力,天线升降杆未发生破坏;结合抗倾覆计算MR/MC=2.37>1.5,超视距雷达车在10级风下未发生倾覆现象,满足雷达作业状态工作要求.
4 结论
以某超视距雷达车为对象建立了仿真模型,并对其在随机风载荷作用下的稳定性问题进行了仿真分析与研究,主要结论如下:
1)建立基于某超视距雷达车系统化的抗风性能分析流程:利用AR 法在Matlab中数值模拟得到与Davenport谱相吻合的随机风载荷,并分别将该随机风载荷运用于超视距雷达车收车状态及雷达作业状态抗风性能分析,得到系统的风振时程响应.
2)该雷达车在10级风载荷下可以安全工作与停靠,天线杆未发生破坏现象,收车状态及雷达作业状态均未发生倾覆现象,满足其安全作业不倾覆的性能要求.此研究方法为机动式超视距雷达车的设计与研究提供了一定的理论依据.