光学滤波腔输出场音频段噪声特性的实验研究*
2022-12-31张超群李瑞鑫张文慧焦南婧田龙2王雅君2郑耀辉2
张超群 李瑞鑫 张文慧 焦南婧 田龙2) 王雅君2)† 郑耀辉2)
1) (山西大学光电研究所,量子光学与光量子器件国家重点实验室,太原 030006)
2) (山西大学,极端光学协同创新中心,太原 030006)
激光噪声已成为限制精密测量精度提升的重要限制因素,噪声分析与抑制技术已成为研究的焦点.光学滤波腔充当光学低通滤波器,可有效抑制超出线宽范围的高频噪声.然而,本文研究发现光学滤波腔的输出场音频段强度噪声高于激光本底噪声.通过建立反馈控制理论模型,利用自制数字控制单元模块,优化了反馈控制比例-积分增益,大幅抑制了反馈控制环路引入的噪声.同时,依据前期工作基础,解释了光学滤波腔输出场剩余的强度噪声来源于输入光场的相位噪声和指向噪声.实验结果为反馈控制环路噪声分析等应用研究提供了基本手段,将推动精密测量向更高测量精度方向发展.
1 引言
精密测量是当今前沿科学研究的一个重要方向,利用激光实现高精度目标测量已成为提高测量精度的重要手段,如引力波探测[1−4]、生物测量[5,6]、天基传感技术等[7,8].然而,对于一个特定的测量系统,测量精度将直接取决于激光源的噪声水平.大多数应用需求测量频段集中在音频段,为了获得该频段达到散粒噪声极限的低噪声光源,通常采取主动或/和被动降噪措施,即主动反馈控制抑噪[9−11]和滤波腔抑噪[12,13]等.因此,发展一种噪声抑制技术成为精密测量领域的重大需求.
模式清洁器(mode cleaner,MC)是抑制激光噪声常用的一种被动降噪技术,用来实现对基模模式的提纯、高频噪声的滤波和激光指向的稳定[14,15].为了实现低通滤波作用,即抑制大于线宽的高频噪声,通常采用Pound-Drever-Hall (PDH) 稳频法锁定MC 光学腔长[16],使基模模式在腔内谐振.然而,本文研究发现MC 输出光场在音频段的噪声显著高于自由运转激光,从而恶化了该频段测量系统的信噪比,不利于实现高灵敏度的精密测量.进一步研究表明,MC 从两个层面对光场噪声产生了影响: 1) PDH 锁定环路引入额外噪声;2) MC 将入射光束相位噪声和指向噪声转换为强度噪声.
针对上述问题,本文基于现场可编程门阵列(field programmable gate array,FPGA)设计了一套数字比例-积分-微分(proportional-integral-derivative,PID)控制系统,通过测量MC 控制环路的开环和闭环传输函数,结合临界比例度法[17],优化了环路增益和带宽,实现了最优的PID 参数选择,消除了PDH 稳频环路引入的音频段噪声.MC 输出场功率噪声谱测试结果表明,相比自由运转激光,MC 滤除高频噪声的同时,将光场相位噪声转换为输出场的强度噪声,从而造成音频段噪声仍高于光场自身的噪声.下一步将结合主动反馈控制,对音频段噪声进行主动降噪,从而避免因被动滤波引入的音频段强度噪声对精密测量应用的影响.
2 控制环路理论模型
如图1 所示,闭环反馈系统主要包括被控对象G(ω)和控制器H(ω) 两个部分,其中,被控对象具有传递函数(即频率响应)G(ω),产生某种形式的输出信号Y(ω) ;控制器具有传递函数H(ω),实现对输入信号X(ω) 实施校准.整套控制环路闭环传递函数T(ω)可以表示为输出Y(ω)和输入X(ω) 信号的比值[18]:
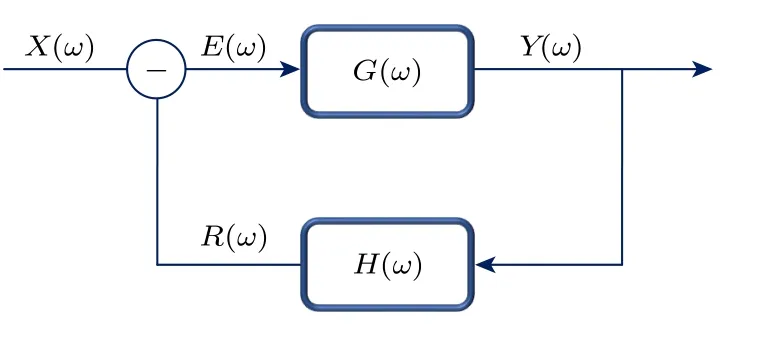
图1 反馈控制系统框图(G(ω) 是被控对象的传递函数,H(ω)是控制器的传递函数,X(ω)是输入信号,Y(ω) 是系统的输出信号,E(ω) 是驱动信号)Fig.1.Block diagram of feedback control system.G (ω) is the transfer function of the controlled object,H (ω) is the transfer function of the controller,X (ω) is the input signal,Y (ω) is the output signal of the system,and E (ω) is the driving signal.

其中,输出信号Y(ω) 由驱动信号E(ω) 和被控对象传输函数G(ω) 的乘积决定,

驱动信号E(ω) 由传递函数组件串联相乘决定,

其中R(ω) 为控制信号.将(3)式代入(2)式可得

因此,闭环传递函数T(ω) 由被控对象的传递函数G(ω)和控制器的传递函数H(ω) 共同决定.控制环路的开环传递函数由被控对象的传递函数G(ω) 和控制器的传递函数H(ω) 的乘积决定,

PI 控制器传输函数H(ω) 与比例增益-积分增益(kP-kI)的关系可表示为

实验中,PI 控制器输出的误差信号经高压放大器放大后,施加至压接在被控对象MC 腔镜上的压电陶瓷,实现腔长的实时稳定控制.在PI 参数优化的过程中,若输入信号是一种偏离理想值的噪声信号,增加kP和kI,H(ω)增大,T(ω) 减小,则进入系统E(ω)的噪声被抑制,随着H(ω) 逐渐增大,抑噪的幅度增强,最终幅值由T(ω)和G(ω) 之间的差值决定.相反,若H(ω)→0,T(ω)→G(ω),则环路对噪声没有抑制.噪声抑制的频率范围定义了系统的带宽,即系统可以补偿输入噪声的频率范围,通常数学对应于 |G(ωB)H(ωB)|=1 (称为开环传递函数)的点,又称为单位增益对应的频率ωB.最终,随着G(ω)·H(ω)接近–1,T(ω) →∞,则整个控制环路单元将出现振荡,变得不稳定.依据奈奎斯特稳定性准则,控制环路的稳定性将相位裕度定义为γ,

其中,∠G(ωB)H(ωB)表示频率ωB处的相位.当γ >30° 时,控制系统处于稳定状态,反之则不稳定.
3 实验装置及原理
图2 为实验装置图,光纤激光器(NKT,Koheras BASIK X15)输出的1550 nm 激光经过光学隔离器OI 和自制的相位调制器EOM[19,20]后分为两束,反射光经过光电探测器PD3 进行强度噪声分析,透射光入射至模式清洁器MC.MC 为三镜环形腔,两面平面镜对1550 nm 激光透射率为1%,凹面镜对该激光完全反射(>99.95%),其腔长为436 mm,精细度为275,线宽为2.5 MHz,采用PDH稳频法锁定腔长后,功率透射率为90%[21,22].PDH控制环路中,信号发生器产生的两路34.3 MHz高频信号,一路用于驱动EOM,一路经混频器与共振型光电探测器PD1[23,24]输出信号进行混频,经低通滤波器解调后,得到反馈控制的误差信号,依次经过基于FPGA 的数字PID 控制器和高压放大器后,反馈至MC 的压电陶瓷,实现腔长锁定.MC 输出激光经过功率衰减后直接进入光电探测器PD2,进行强度噪声分析,实验中PD2 和PD3输入功率维持1 mW 不变.
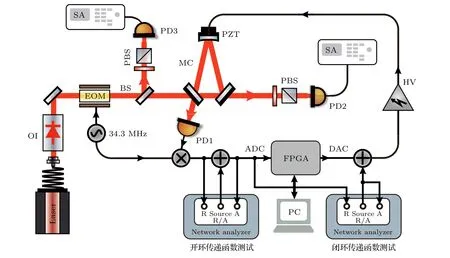
图2 光学滤波腔输出场音频段噪声特性分析实验装置图 (OI,光学隔离器;EOM,电光相位调制器;BS,分束镜;PBS,偏振分束器;MC,模式清洁器;PD1—3,光电探测器;HV,高压放大器;SA,频谱分析仪;ADC,模拟数字转换;DAC,数字模拟转换;FPGA,现场可编程门阵列)Fig.2.Experimental setup for analyzing the noise characteristics of the output field of the optical filter cavity (OI,optical isolator;EOM,electro-optic phase modulator;BS,beam splitter;PBS,polarizing beam splitter;MC,mode cleaner;PD1–3,photodetector;HV,high voltage amplifier;SA,spectrum analyzer;ADC,analog to digital conversion;DAC,digital to analog conversion;FPGA,field programmable gate array).
MC 的整个PDH 稳频环路所有光电器件均通过自研完成,其中FPGA(PCIe-7852 R)数字PID控制器硬件部分从美国国家仪器有限公司购买,共有 8 路采样率为750 kS/s 16 位分辨率的模拟数字转换ADC 和 8 路采样率1 MS/s 16 位分辨率的数字模拟转换DAC,采用LabView 软件实现FPGA 板卡程序和电脑通信,通过电脑界面直接设置参数和控制命令,进行实时快速反馈运算.相比于模拟PI 控制器,数字控制器可以更方便精细、快捷地实现最优的PI 参数调节.针对我们的控制对象,对FPGA 数字环路进行了优化设计,主要分为两部分: 锁定模式(由PI 控制器组成,实现腔长锁定)和扫描模式(由锯齿扫描单元组成,对腔长进行扫描).当进入锁定模式时,首先初步设置一定的kP和kI,并设置扫描阈值;然后进入扫描模式,当扫描到的直流信号低于扫描阈值时,控制环路将自动由扫描模式切换至锁定模式,将MC 腔长保持锁定;除非通过控制界面解除锁定或输入一个直流信号高于锁定的阈值,则系统解锁,恢复到扫描模式.同时,程序设置了没有人为干预的情况下,如果控制环路失锁,则自动进入扫描模式,并寻找设定阈值,恢复环路锁定状态.
系统开环传递函数的幅度和相位可以反映控制环路的增益、带宽以及相位裕度.在反馈控制中,低频增益越高、带宽越大,对低频段噪声的抑制幅度则越大;同时,控制环路相位裕度需保持在30°以上,使其处于稳定状态.系统闭环传递函数的幅度可以反映噪声的抑制水平,幅值越小,控制环路对低频噪声抑制能力越强.因此,我们构建了开环和闭环传递函数测试网络,作为辅助测量方案,优化MC 控制环路PI 参数,实现最优的腔长锁定,避免额外噪声引入.
4 实验结果及分析
在前期的工作中,MC 对超出其线宽范围的噪声起到低通滤波的作用,将光纤激光器的强度噪声抑制到17 MHz 以上即达到散粒噪声基准[25].然而,我们对MC 输出光场音频段的强度噪声研究发现,在小于100 kHz 的频率范围内,光场的强度噪声显著高于其本底噪声,图3 为1 mW激光功率的功率噪声谱.进一步研究表明,噪声耦合主要通过两种途径引入: 1) PDH 锁定环路引入额外噪声;2) MC 将入射光束相位噪声转换为强度噪声.针对两个噪声耦合问题,我们开展了如下研究工作.

图3 激光的本底强度噪声(橙色曲线)和MC 腔长锁定后输出光场的强度噪声(其他颜色曲线) (a) 频率3—300 kHz 范围内的功率噪声谱(分辨率带宽为10 kHz;视频带宽为50 Hz);(b) 频率小于3 kHz 范围内的功率噪声谱(分辨率带宽为10 Hz;视频带宽为1 Hz)Fig.3.Background intensity noise of the laser (orange curve) and the intensity noise of the output light field after the MC cavity length is locked (other color curves): (a) Power noise spectrum in the frequency range of 3–300 kHz (Resolution bandwidth (RBW)is 10 kHz,video bandwidth (VBW) is 50 Hz);(b) power noise spectrum in the frequency range less than 3 kHz (RBW is 10 Hz,VBW is 1 Hz).
为避免PDH 锁定环路引入额外的噪声,构建了开环和闭环传递函数测试网络(如图2 所示),依据第2 节反馈控制的理论及奈奎斯特稳定性准则,结合临界比例度法,总结了优化MC 中PI 控制参数的具体实施方案.1) 粗略对比例增益kP和积分增益kI赋一个初始值,此时环路增益较小,响应速度较慢,积分消除误差持续时间较长,控制信号无法跟随环境条件改变引起的腔长变化量,使控制环路出现较大误差,产生周期性低频振荡,施加至环形腔压电陶瓷上形成腔长调制信号,表现为输出光场的低频幅度调制,如图3(b)曲线a 所示;2) 逐渐增大kP,通过传递函数测试过程或者MC 输出场噪声谱观察环路工作状态,直至环路出现明显的振荡;3) 逐渐减小kP,直至控制环路振荡刚好消失,记录此时的kP值,并将其设定为记录值的45%—70%,如图3(b)曲线b 所示;4) 逐渐增大kI,直至环路出现振荡;5) 逐渐减小kI到振荡消失,记录此时kI值,并设定为记录值的10%—30%,如图3(b)曲线c 所示;6) 通过观察PD2 输出的功率噪声谱,在步骤5)设定值附近搜索最佳的PI 参数,直至噪声水平达到最低,此时再调节PI 参数,噪声会增加,则实现了最优的PI 参数设置,如图3(b)曲线d 所示.此时,环路增益达到最优值,响应速度可快速修正系统误差并达到稳定状态,从而抑制了曲线a—c 的周期性低频振荡信号.
在PI 参数调试过程中,当分析频率大于3 kHz时,PI 参数的变化不会影响强度噪声的幅度,如图3(a);当分析频率小于3 kHz 时,随着PI 参数接近最优值,光场强度噪声逐渐接近最低的噪声水平,如图3(b).经过对控制环路传递函数进行测试,我们发现在优化PI 参数的过程中,由开环传递函数测试结果可知(如图4 所示),环路反馈控制带宽逐渐从290 Hz 提高至2 kHz(最佳带宽);由闭环传递函数测试结果可知(如图5 所示),控制环路低频抑噪水平提高了约30 dB,详细参数见表1.

表1 实验参数Table 1.Parameters of the experiment.
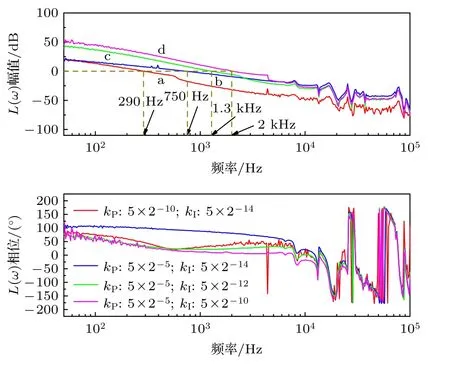
图4 系统开环传递函数的幅度和相位Fig.4.Amplitude and phase plots of the open-loop transfer function of the system.

图5 闭环系统传递函数的幅度Fig.5.Magnitude plot of the transfer function of the closed-loop system.
然而,由图3(a)和图3(b)可知,即使在最优的反馈控制参数条件下,MC 输出场的低频噪声(<100 kHz)仍高于激光的本底噪声.由我们前期的研究工作[25]可知,其主要原因是光场进入MC后,由于谐振腔的色散作用引起光场的强度和相位噪声相互转换.因此,输出场的强度噪声由输入场的强度噪声和相位噪声共同决定,光纤激光器相位噪声高于强度噪声的特性导致MC 输出场噪声高于光场的本底噪声.同时,光束指向噪声引起输入光场与MC 模式匹配发生变化,由于MC 只允许基模通过,模式失配激发的高阶模被MC 反射输出,引起输出光场强度变化,表现为指向噪声转换为输出场的强度噪声[26].在今后的工作中,我们将采用高精细度超稳光学谐振腔作为参考基准,通过将激光锁定在超稳腔上,实现相位噪声的抑制;通过采用隔振平台、对装置加装屏蔽外壳、对装置整体控温、将空间传输的激光光束耦合进光纤等方法,实现指向噪声的抑制.通过对相位噪声和指向噪声的抑制,将MC 输出光场的强度噪声抑制到本底噪声.
5 结论
本文发现MC 输出场线宽内引入了额外强度噪声,通过实验分析噪声主要来源包含: 1) 腔长锁定引入额外噪声;2) 激光相位噪声和指向噪声耦合至强度噪声.我们通过建立反馈控制理论模型,依据奈奎斯特稳定性准则,并结合临界比例度法,采用数字反馈控制环路实现了最优的环路参数调试,将反馈控制环路增益抑噪水平提高了30 dB,大幅抑制了模式清洁器控制环路引入的音频噪声.同时结合现有工作基础,解释了剩余的强度噪声主要来自于激光的相位和指向噪声,这为模式清洁器在精密测量中的应用提供了分析的基本手段.下一步,我们将结合主动反馈控制,针对激光音频段噪声进行主动操控,避免模式清洁器引入的音频噪声对精密测量精度的影响.
