改进RBF神经网络的机械臂轨迹跟踪控制方法
2022-12-30姜卫东
陈 军,姜卫东
(1.郑州西亚斯学院电子信息工程学院,河南 新郑 451150;2.合肥工业大学,安徽 合肥 230009)
1 引言
现阶段工业化的迅速发展,逐渐推进机械臂更加智能化,并且在一定程度上提高机械臂定位精度,确保运动稳定性,并被广泛应用于各种领域[1]。多关节机械手已逐步发展成为工业控制领域应用最为广泛的核心设备之一[2]。机器臂控制中的主要问题就是设计有效的控制器来实现机器人末端对预期参考轨迹的快速稳定跟踪,同时需要考虑滑动模态轨迹运动。滑动模态在变结构控制系统中对满足匹配条件的不确定性、参数变化等系统干扰具有不变性。
因此,对滑动模态进行充分考虑可以有效提高机械臂轨迹跟踪控制效果。在实际应用中,因为机器人自身的耦合性较强、变量较多,并且采用了非线性形式,降低了机械臂的轨迹跟踪控制精度。
目前相关领域大量学者对其进行研究。文献[3]运用增强学习算法,对比例−微分控制器进行设计,对定位干扰进行补偿,有效跟踪控制机械臂运动轨迹。该方法具有较好的可行性,但无法确保机械臂轨迹跟踪控制稳定性。文献[4]采用状态反馈和改进神经网络滑模方法,对机械臂系统进行局部控制,并基于非线性映射法,设置滑模控制器的动态补偿项为系统中部分不确定性,运用Lyapunov函数法,获取神经网络权值更新率,实现机械臂轨迹跟踪控制,该方法的收敛速度较快,但存在跟踪控制精度较低的问题。文献[5]引入LuGre摩擦模型,对基函数的中心和宽度进行自适应调整,控制器对负载变化具有较强的鲁棒性,采用滑模控制项减小逼近误差,可以有效提高机械臂控制的精度,但存在机械臂轨迹跟踪控制时间较长的情况。为了解决上述方法中存在的问题,提出改进RBF神经网络的机械臂轨迹跟踪控制方法。采用Lagrange函数定义机械臂系统动力学方程,通过关节变量的偏导数,推导出标称模型的运动微分方程,提高滑动模态运动形式,以此构建机械臂的动力学模型。并在此基础上,通过滑模控制鲁棒项函数,提高机械臂轨迹跟踪控制稳定性,利用Newton算法的术语函数,获得非线性积分滑模控制方程,训练RBF神经网络自适应更新法则,减小机械臂轨迹跟踪控制误差。
2 机械臂动力学模型构建
将SCARA型工业机械臂作为此次研究对象,构建机械臂动力学模型。SCARA型工业机械臂中存在四个自由度,其中,第一关节和第二关节属于机械臂运动旋转活动关节,第三关节属于机械臂末端移动活动关节,第四关节属于机械臂末端抓取旋转腕部[6]。机械臂动力学模型,如图1所示。

图1 机械臂动力学模型Fig.1 Dynamics Model of Manipulator
根据图1 可知,由质量为m1、m2的连杆L1和L2构成模型结构,连杆的长度为l1、l2,将连杆L1固定在底座上,通过转动第一关节和第二关节顺次连接底座,机械臂机构主要由连杆L1和L2组成,τ1和τ2分别表示为电机输出驱动各关节连杆的力矩[7]。
设 置 参 数si、ci、sij、cij分 别 描 述sinθi、cosθi、sin(θi+θj)、cos(θi+θj)。
在x、y轴上两个质心对应的坐标如下:
在由Lagrange函数定义的机械臂动力学方程中,引入关节变量的偏导数,获得标称模型对应的运动微分方程:

式中:M(θ)—惯性矩;V(θ,θ̇)—离心力以及哥氏力矢量;G(θ)—重力矢量。
将上式转化为下式:

式中:θ—角位移矢量;θ̇、θ̈—速度矢量和加速度矢量,以此获取滑动模态邻域,提高控制精度。
通过上述过程构建机械臂动力学模型:

式中:Td(θ,θ̇)—机械臂在运动过程中受到的干扰,主要有动态特性、负荷变化以及建模误差等;F(θ)—在关节运动过程中所
受到的摩擦,包括动态摩擦和静态摩擦。
3 机械臂轨迹跟踪控制方法
改进RBF神经网络的机械臂轨迹跟踪控制方法,通过New⁃ton 算法中的术语函数,训练RBF 神经网络,控制机械臂跟踪轨迹。在控制过程中对RBF神经网络的高斯函数、中心宽度以及网络权重进行调整,保证机械臂系统的稳定性。利用Newton算法中的术语函数降低外部扰动和非线性扰动,提高系统的鲁棒性和稳定性。
设y(x)代表的是RBF神经网络的输出向量,其表达式如下:

当t→∞时,机械臂系统的控制误差可以通过非自适应鲁棒控制得以保证,设e(t)代表的是机械臂运动轨迹跟踪误差向量;s(t)代表的是滑模控制函数,其表达式如下:

式中:qd—机械臂的实际运动轨迹;q—机械臂的理论运动轨迹;λ—对角正定矩阵。
机械臂系统的控制性能稳定性可以通过误差测度s(t)进行评价[9]。滑动模态的控制能够克服系统的不确定性,对非线性系统的轨迹跟踪控制具有良好的效果。由滑模控制理论可知,当滑模控制平面s(t)=0时,通过下述微分方程控制滑模:

通过改进传统滑模控制函数,减小机械臂系统的跟踪控制误差,将积分项引入Newton算法中的术语函数中,获得非线性积分滑模控制方程:

式中:μ—对角正定矩阵;β—设计参数。
在机械臂动力学模型的基础上获得如下自适应控制法则:

式中:ŷ(x)—自适应函数;K—正定矩阵;τs—抑制近似误差和不确定性误差产生影响的滑模控制器[10],可通过下式进行描述:
4 仿真测试分析
为了验证改进RBF神经网络的机械臂轨迹跟踪控制方法的有效性,将MATLAB 软件作为仿真环境,分别采用所提方法、文献[3]方法和文献[4]方法进行对比测试。测试过程中,以精度、控制时间和稳定性作为测试指标,对所提方法的可行性进行分析。
4.1 精度分析
机械臂工作过程中,由于操作过程的不同,导致复杂度也存在不同,精度有所差异。以下仿真实验为了验证所提方法的机械臂轨迹跟踪控制精度,分别采用所提方法、文献[3]方法和文献[4]方法进行对比,在考虑到摩擦非线性、机械臂系统动力学参数和外界干扰的因素下,对比不同方法的机械臂轨迹跟踪控制误差,如图2所示。
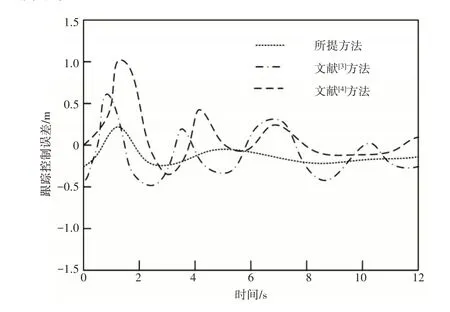
图2 不同方法的机械臂轨迹跟踪控制误差Fig.2 Trajectory Tracking Control Error of Mechanical Arm with Different Methods
分析图2可知,文献[4]方法的机械臂轨迹跟踪控制误差较大,文献[3]方法的机械臂轨迹跟踪控制误差次之,而所提方法的机械臂轨迹跟踪控制误差较小。
由此可知,与文献[3]方法和文献[4]方法相比,所提方法的机械臂轨迹跟踪控制精度较高。因为所提方法通过Lagrange函数定义机械臂系统动力学方程,在机械臂动力学方程的基础上,结合径向神经网络和牛顿改进算法控制机械臂轨迹,通过改进滑模控制函数,使跟踪控制误差减小、精度提高。
4.2 控制时间分析
为了进一步验证所提方法的可行性,对机械臂轨迹跟踪控制进行测试分析,时间越少控制效果越好。因此,分别采用所提方法、文献[3]方法和文献[4]方法进行对比,对比不同方法的机械臂轨迹跟踪控制时间,如图3所示。
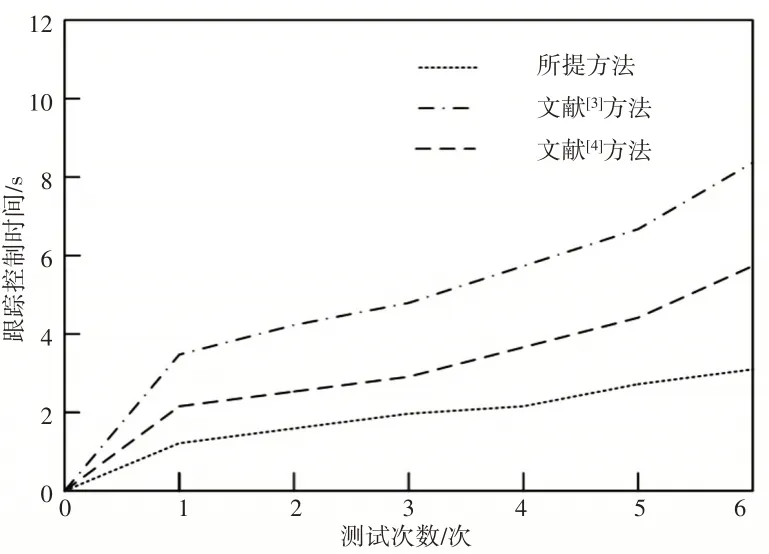
图3 不同方法的机械臂轨迹跟踪控制时间Fig.3 Control Time of Mechanical Arm Trajectory Tracking with Different Methods
分析图3可知,随着实验次数的增加,不同方法的跟踪控制时间随之增加。当实验次数为6次时,文献[3]方法的机械臂轨迹跟踪控制时间为8.2s,文献[4]方法的机械臂轨迹跟踪控制时间为5.8s,而所提方法的机械臂轨迹跟踪控制时间仅为3.1s。由此可知,所提方法的机械臂轨迹跟踪控制时间较短。
4.3 稳定性分析
机械臂的第一关节和第二关节是运动旋转活动关节,属于基础性关节。为了有效验证所提方法的稳定性,在外界干扰因素下,对基础性关节角的位移进行跟踪控制轨迹分析。设置机械臂期望输出轨迹为Qw=50cos(πt),滑模控制函数为s(t)=diag{2 5,25} 。外界干扰因素为τd1=30cos(πt)、τd2=60cos(πt),得到不同方法在干扰环境下的跟踪控制轨迹,如图4所示。

图4 不同方法在干扰环境下的跟踪控制轨迹Fig.4 Track of Tracking Control in Interference Environment by Different Methods
分析图4可知,所提方法在干扰环境下获得的机械臂跟踪控制轨迹的关节角位移变化较小,且与期望输出的机械臂跟踪控制轨迹基本相符,表明在干扰环境下,所提方法可以有效控制机械臂运行轨迹;而文献[3]方法和文献[4]方法在干扰环境下对机械臂运行进行跟踪时,获得的机械臂跟踪控制轨迹的关节角位移变化较大,且机械臂跟踪控制轨迹存在明显波动,与期望输出的机械臂跟踪控制轨迹相差较大,表明文献[3]方法和文献[4]方法受干扰因素的影响较大,在干扰环境下获得的机械臂跟踪控制轨迹稳定性较差,而所提方法的机械臂轨迹跟踪控制较好。因为所提方法在控制过程中,利用Newton算法中的术语函数,训练RBF神经网络的高斯函数、中心宽度以及网络权重,降低外部扰动和非线性扰动,从而确保了机械臂轨迹跟踪控制稳定性。
5 结束语
为了提高机械臂轨迹跟踪控制精度和稳定性,缩短跟踪控制时间,提出改进RBF神经网络的机械臂轨迹跟踪控制方法。采用Lagrange函数定义机械臂系统动力学方程,并与关节变量的偏导数相结合,构建机械臂的动力学模型。通过非自适应鲁棒项控制,提高机械臂轨迹跟踪控制的稳定性,引入Newton算法中的术语函数,获得非线性积分滑模控制方程,训练RBF神经网络自适应更新法则,更新滑模控制补偿器,实现机械臂运动轨迹跟踪误差的控制。所提方法的跟踪控制精度高、控制时间较短、稳定性好,为机器人技术的发展奠定了基础。