3−PSS柔性并联微操作机器人运动学及工作空间分析
2022-12-30何文浩
任 军,何文浩
(1.湖北工业大学机械工程学院,湖北 武汉 430068;2.现代制造质量工程湖北省重点实验室,湖北 武汉 430068
1 引言
柔性并联机器人结合了并联机构刚度大、承载能力强和柔性铰链无间隙、无摩擦、易于装配等一系列优点,使其结构稳定、精度高、误差小,在诸如精密加工与测量、MEMS微装配、医疗微操作、航空航天等领域拥有巨大的市场潜力,因此开展柔性并联机器人的研究具有十分重要的意义。
从自由度的角度,柔性并联机器人的研究大多集中于三自由度[1−3]和六自由度[4−6]。三自由度柔性并联机器人因其结构简单、控制方便和制造成本低廉等优点受到诸多研究者的青睐。较早的,文献[7]采用大行程的柔性移动副设计了一种3−PPP型空间平移柔性并联微动平台,其可在三个移动方向实现毫米级的运动行程;文献[8]设计了一种3−RRC型三自由度空间柔性并联机器人,并对其进行了动力学研究和动态特性分析;文献[9]通过使用桥式柔性位移放大机构研制了一种3−RPS柔性并联机构,并对其进行了刚度建模分析;文献[10]设计了一种新型的基于正交支链3−P(4S)柔性并联机构,并对机构刚度和误差进行了研究;文献[11]提出了一种分布柔度式3−PPP型柔性并联微定位平台,与集中柔度式相比,分布柔度式具有更大的运动行程;除此之外,文献[12−13]高校也对三自由度柔性并联机器人开展了相关的研究。上述研究的机构中多采用做平面运动的单自由度柔性铰链,铰链的结构比较简单,但需要的数量较多,使得整体机器人结构设计较为复杂。相比之下,柔性球铰可以实现三个方向转动,一个球铰具有三个自由度可减少整体结构设计需要的柔性铰链数量,使机器人结构设计更加简单、紧凑。
基于3−PSS型delta并联机构,将机构中的普通球铰用柔性球铰替代,设计了一种新型的三自由度柔性并联微操作机器人。其中动平台和机架之间通过3根具有移动副和柔性铰链的支链连接,由压电马达驱动三个移动滑块分别在三根导轨上做竖直方向的直线运动,然后通过连杆带动底端动平台运动。该机构可实现x、y和z三个方向的毫米级平移运动,可广泛应用于光学、生物医学、超精密加工等领域[14]。
2 柔性并联机器人运动学分析
3−PSS柔性并联微操作机器人整体结构,如图1所示。机器人由三条相同的支链呈三棱锥形状布置,支链结构,如图2所示。移动滑块和连杆之间以及连杆和动平台之间通过全向型柔性球铰连接,如图3所示。
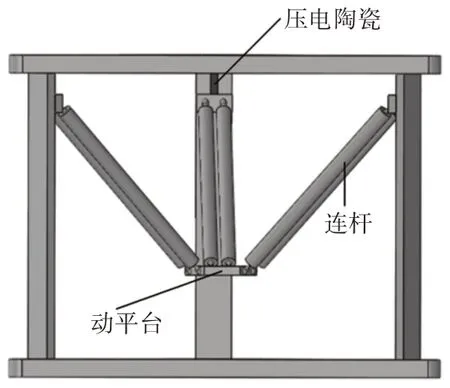
图1 整体结构Fig.1 Overall Structure

图2 支链结构Fig.2 Branched Chain Structure

图3 柔性球铰Fig.3 Flexure Spherical Hinge
2.1 机构的自由度
在3−PSS柔性并联微操作机器人中有1个动平台,1个机架,3个滑块,6根连杆共11个构件,3个滑块为原动件。该机构中有3个移动副,12个球面副,总共有15个运动副。空间机构的自由度可以采用Kutzbach−Grübler[15]公式计算:

式中:M—机构自由度;n—空间中除了机架外的构件数;g—机构的总运动副数;fi—第i个运动副的相对自由度数;v—机构中全部过约束的总数;ξ—机构中存在的局部自由度。
其中n=11,g=1,v=0;ξ=6。计算得出机构的自由度为3。由反螺旋理论[16]可知,此机构只能是三个移动自由度,能在空间中实现移动,满足3−PSS柔性并联微操作机器人的要求。
2.2 机构的位置方程
因为3−PSS柔性并联微操作机器人的动平台和静平台之间的运动存在关联,需要进行运动学分析,确定他们之间的运动关系,进而确定方程。建立的坐标系,如图4所示。

图4 动、静平台坐标系Fig.4 Coordinate System of Dynamic and Static Platform
静平台半径设为R,动平台半径设为r,连杆长度为L。并联机器人静平台简图,如图5所示。其中ε1=−150°,ε2=−30°,ε3=90°。因为三根连杆的长度始终相等,所以可得:

图5 静平台简图Fig.5 Schematic Diagram of Static Platform

设动平台中心P点的坐标为(x,y,z),三个滑块在静平台上的坐标系中Z方向上的坐标分别为d1,d2,d3,由此可得A,B,C三点 在 静 平 台 坐 标 系 中 坐 标 为:A=(Rcosε1,Rsinε1,d1),B=(Rcosε2,Rsinε2,d2),C=(Rcosε3,Rsinε3,d3),因为动平台相对于静平台只有平动,没有转动,所以A1,B1,C1三点在静平台坐标系中的坐标为:A1=(x+rcosε1,y+rsinε1,z),B1=(x+rcosε2,y+rsinε2,z),C1=(x+rcosε3,y+rsinε3,z)。

2.3 机构的逆运动学模型
当已知动平台的坐标P(x,y,z),求三个滑块的位置di(i=1,2,3),称为机构的逆运动学求解。根据公式可得机构的逆运动学模型。

2.4 机构的正运动学模型
当已知滑块位置di(i=1,2,3),求动平台坐标P(x,y,z),称为机构的正运动学求解。令ai=rcosεi−Rcosεi,bi=rsinεi−Rsinεi,则公式可化简为:

2.5 运动学模型验证
为验证所推导的正、逆运动学模型准确性,通过对比输入正解得到的反解结果和输入反解得到的正解结果是否一致来判断。机器人的结构参数,如表1所示。在MATLAB软件中采用三组数值算例分析,得到的计算结果,如表2~表4所示。

表1 机器人结构尺寸参数Tab.1 Dimension Parameters of Robot

表2 第一组数值算例验证Tab.2 Verification of the 1st Set of Numerical Examples

表3 第二组数值算例验证Tab.3 Verification of the 2nd Set of Numerical Examples

表4 第三组数值算例验证Tab.4 Verification of the 3rd Set of Numerical Examples
分析结果表明,反解的输入与正解输出结果、正解输入与反解输出的结果一致,证明机构运动学模型正确。
3 机器人的工作空间分析
柔性并联微操作机器人工作空间是指动平台在连杆的带动下能达到的所有空间,即机器人下端点在固定坐标系中的所有能达到位置点的集合[17]。机器人的尺寸大小是设计机器人的关键参数之一,它会直接影响机器人的工作空间。因为当确定一组d1,d2,d3坐标时可以得到唯一的一组动平台的坐标;同样的,当已知动平台的坐标也可以求出唯一的一组滑块位置,因此可以运用MATLAB软件仿真出机器人的工作空间。选取一定数量的滑块位置数组,根据机器人的运动学正解可以求出动平台的坐标,再根据机器人的连杆参数和柔性球铰的极限转角求出限制条件,当滑块坐标数量足够多时就可以精确模拟出动平台的所有活动范围。
影响机器人工作空间的因素主要有以下几点:
(1)机器人导轨长度H的影响:柔性并联机器人的驱动滑块安装在导轨上,并不能无限上升或下降,只能在导轨上移动,滑块的运动范围需要满足0≤di≤H(i=1,2,3)。
(2)三根连杆长度L的影响:机器人的三根连杆长度的大小会对机器人工作空间的形状和大小产生影响。
(3)柔性铰链极限转角θmax的影响:驱动滑块和连杆之间以及连杆和动平台之间都是通过柔性球铰连接,但是依据柔性球铰的结构和尺寸,柔性球铰的转动角度是有范围限制的,当柔性球铰受到的弯曲应力达到极限时,柔性球铰的转角也达到极限。在3−PSS柔性并联微操作机器人中柔性球铰极限转角的约束条件为:


利用边界搜索法[18]搜索工作空间,当约束条件达到许用范围极限值的时候,动平台中心达到工作空间的边界位置,3−PSS柔性并联微操作机器人工作空间搜索流程,如图6所示。

图6 工作空间搜索程序流程图Fig.6 Workspace Search Program Flow Chart
结合机器人尺寸参数将程序按照上述要求写入MATLAB之后即可搜索出3−PSS柔性并联微操作机器人的运动空间。机器人的尺寸参数,如表1所示。用MATLAB 软件搜索出来的并联机器人的工作空间三维立体图,如图7所示。

图7 工作空间的三维立体图Fig.7 A Three−Dimensional View of the Workspace
由图可知并联机器人的工作空间是一个柱状体,在高度为(0~64)mm的时候,工作空间的X-Y截面是形状相同的均匀截面,但是当高度超过64mm之后工作空间X-Y截面逐渐减小且变得不规则。
4 尺寸参数对工作空间的影响
4.1 导轨长度H的影响
采用截面分析法分析导轨长度对于3−PSS柔性并联微操作机器人的工作空间的影响。即当动平台半径r=7.5mm;静平台半径R=91.5mm;连杆长度L=140mm;柔性球铰极限转角θmax=5°固定不变时,分析当导轨长度分别为:H=180mm;H=200mm;H=220mm;H=240mm 时得到的工作空间。MATLAB 搜索得到的机构在不同导轨长度下工作空间的X-Y截面图,如图8所示。工作空间的X-Z截面图,如图9所示。工作空间的有效高度和无效高度大小,如表5所示。

图8 不同导轨长度时工作空间的X-Y截面Fig.8 X-Y Cross Section of the Workspace with Different Guide Length

图9 不同导轨长度时工作空间的X-Z截面Fig.9 X-Z Cross Section of the Work Space with Different Guide Length
由图8和图9可知,在其他尺寸参数都相同时,不同长度的导轨对机器人工作空间X-Y截面没有任何影响,但是随着导轨长度的增大机器人工作空间的高度也会逐渐增大。由表5可知,不同导轨长度时机构工作空间中的无效高度恒定不变。

表5 不同导轨长度时工作空间的有效高度和无效高度Tab.5 Effective Height and Invalid Height of the Work⁃space with Different Guide Length
4.2 连杆长度L的影响
采用截面分析法分析不同连杆长度对3−PSS柔性并联微操作机器人的工作空间的影响。即当导轨长度H=200mm;动平台半径r=7.5mm;静平台半径R=91.5mm;柔性球铰极限转角θmax=5°固定不变时,分析机器人连杆长度分别为:L=130mm;L=140mm;L=150mm;L=160mm时得到的工作空间。MATLAB搜索得到的机构在不同连杆长度下工作空间的X-Y截面图,如图10所示。

图10 不同连杆长度时工作空间的X-Y截面Fig.10 X-Y Cross Sections of Workspace with Different Connecting Rod Lengths
工作空间的X-Z截面图,如图11所示。工作空间的有效高度和无效高度大小,如表6所示。
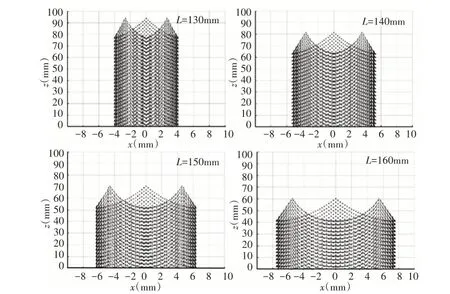
图11 不同连杆长度时的工作空间X-Z截面Fig.11 X-Z Cross Section of the Workspace with Different Connecting Rod Lengths
由图10、图11可知,在其他尺寸参数不变的情况下,随着连杆长度的逐渐增大,机器人工作空间的X-Y截面也逐渐增大,但是机构工作空间的高度却在逐渐减小。由表6可知,当机构连杆长度增大时,机构工作空间的无效高度会逐渐增加,但是增加较为缓慢。

表6 不同连杆长度时工作空间的有效和无效高度Tab.6 Effective and Invalid Heights of the Workspace with Different Connecting Rod Lengths
4.3 柔性铰链的极限转角θmax 的影响
采用截面分析法分析不同的柔性球铰极限转角对3−PSS柔性并联微操作机器人工作空间的影响。即当导轨长度为:H=200mm;动平台半径r=7.5mm;静平台半径R=91.5mm;连杆长度L=140mm 固定不变时,分析柔性铰链极限转角分别为:θmax=4°、θmax=5°、θmax=6°、θmax=7°时得到的工作空间。MATLAB搜索得到的机构在不同柔性铰链极限转角下工作空间的X-Y截面图,如图12所示。工作空间的X-Z截面图,如图13所示。工作空间的有效高度和无效高度大小,如表7所示。由图12可知,在其他尺寸参数不变的情况下,随着柔性球铰极限转角的逐渐增大,工作空间的X-Y截面也逐渐增大;由图13可知,工作空间的Z向总高度没有任何变化,但是工作空间的有效高度随着柔性铰链极限转角的增大而逐渐减小,且减小的越来越慢。因此,柔性球铰的极限转角对并联机器人的工作空间的X-Y截面大小有很大影响,但是对于并联机器人工作空间的高度影响较小。

图12 不同柔性铰链极限转角时工作空间X-Y截面Fig.12 X-Y Cross Section of Workspace with Different Limit Angles of Flexure Spherical Hinge

图13 不同柔性铰链极限转角的机构工作空间X-Z截面图Fig.13 X-Z Cross Section of Workspace with Different Limit Angles of Flexure Spherical Hinge

表7 不同极限转角时工作空间有效高度和无效高度Tab.7 Effective Height and Invalid Height of Workspace with Different Limit Angles
5 结论
(1)随着导轨长度的增大,机器人的工作空间Z向高度会逐渐增大,但是X-Y截面大小不变,对于改进机构运动空间的高度具有很大参考价值。
(2)随着连杆长度的增加,并联机器人的工作空间的X-Y截面会逐渐增大,但是Z向高度会逐渐减小,且无效工作空间高度也会逐渐增加;随着柔性球铰极限转角θmax的增大,并联机器人工作空间X-Y截面逐渐增大,但是Z向总高度保持不变,而无效工作空间高度会逐渐增加,对于机器人基于特定约束条件下的结构参数优化具有重要意义。