面向多波束卫星通信网络的步进跟踪方法*
2022-12-30何江涛孙永磊
刘 越,黄 印,何江涛,赵 诚,孙永磊,杨 健
(北京遥感设备研究所,北京 100854)
0 引 言
卫星通信可满足未来通信网络广域覆盖、海量终端泛在接入的需求。由于星地传输距离远、衰减大,卫星通信的用户终端天线通常为具有指向性的定向天线,以提高无线传输速率和用户服务质量。这种情况下,用户终端需时刻将天线波束对准卫星,实现卫星跟踪,要求天线具有波束快速扫描的能力[1-2]。在相控阵天线中,多个天线单元在空间排布形成天线阵列,通过实时改变每个天线单元的传输相位即可控制波束指向,波束切换时间仅为ns量级。相控阵天线以其剖面低、波束捷变能力强的优势,广泛应用于车载、船载、机载等卫星通信终端中[3-4]。
一般情况下,为实现卫星跟踪,应已知在相同坐标系下终端天线的位置姿态信息和卫星位置,通过波束指向执行角度的解算实现程序跟踪[5]。但是,在特殊地形地貌条件或强电磁干扰环境下,终端的位置姿态信息可能无法获得。此时,终端可捕获并跟踪卫星定时发出的信标信号,通过比较波束在不同指向时信标的能量判断卫星位置,实现信标自动跟踪。常见的自动跟踪方法有单脉冲跟踪、圆锥扫描跟踪以及步进跟踪。相比于步进跟踪,前两者跟踪精度高,但馈电系统和结构设计复杂,整机成本高[6-7]。
为提高吞吐量,卫星通信网络正在向多波束发展[8],多个点波束代替宽波束进行区域覆盖,不同波束间频率复用,每个波束的覆盖区域可动态调整。本文针对S频段相控阵用户终端在多波束卫星网络中的跟踪方法展开研究。考虑到S频段波束较宽,对跟踪精度要求低,波束指向的偏离对卫星信号接收的影响较小,为实现天线设计成本与卫星跟踪性能的平衡,本文采用步进跟踪方法。由于多个波束覆盖区域的重叠,终端天线可能接收不同频点的信标信号,为避免在不同波束指向比较多个信标的能量导致跟踪时延增加,本文提出仅需比较单一频点能量的方法。更进一步,为满足用户终端动中通业务需求,讨论了天线载体位置姿态变化时的跟踪策略。在性能测试中,通过在静态和动态条件下与程序跟踪的比较,验证了所提步进跟踪方法的有效性。
1 终端天线系统设计及分析
卫星相控阵终端天线系统组成如图1所示,包括天线阵列(天线单元和收发组件)、功分/合成网络、射频通道、跟踪接收机、惯性器件和天线罩等部分。
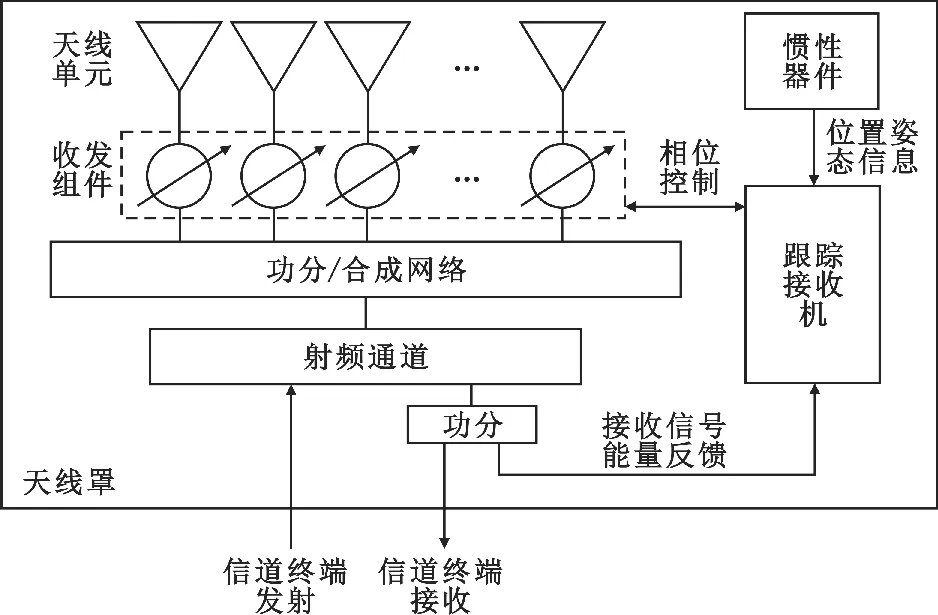
图1 卫星相控阵终端天线系统组成
卫星相控阵终端天线系统的工作流程为:惯性器件获取天线实时位置姿态信息,跟踪接收机解算执行角度,根据天线阵列中每个天线单元的位置计算移相值,并对收发组件中移相器进行配置,控制相控阵天线波束实时指向卫星。通过天线阵列接收的卫星信号经过合成网络及射频通道的处理输出至信道终端,同时,信道终端的发射信号通过射频通道及功分网络输出至天线阵列辐射至自由空间。当天线位置姿态信息失效时,跟踪接收机控制波束指向进行步进扫描寻星搜索并接收信标信号,信标信号能量单位为dBm。为更好比较不同波束指向接收的信标能量,跟踪接收机对接收的信标信号进行模数转换量化,量化值无量纲,通过比较波束在不同指向时接收信标的能量量化值确定卫星位置。
在讨论跟踪方法前,首先描述相控阵终端天线的性能,该性能直接影响跟踪方法的波束扫描过程。为保证天线在不同位置姿态条件下均能稳定跟踪卫星,离轴角(波束偏离法向的扫描角度)的范围为-70°~70°。经过暗室校准及方向图扫描,得到天线在不同离轴角条件下的接收方向图如图2所示。
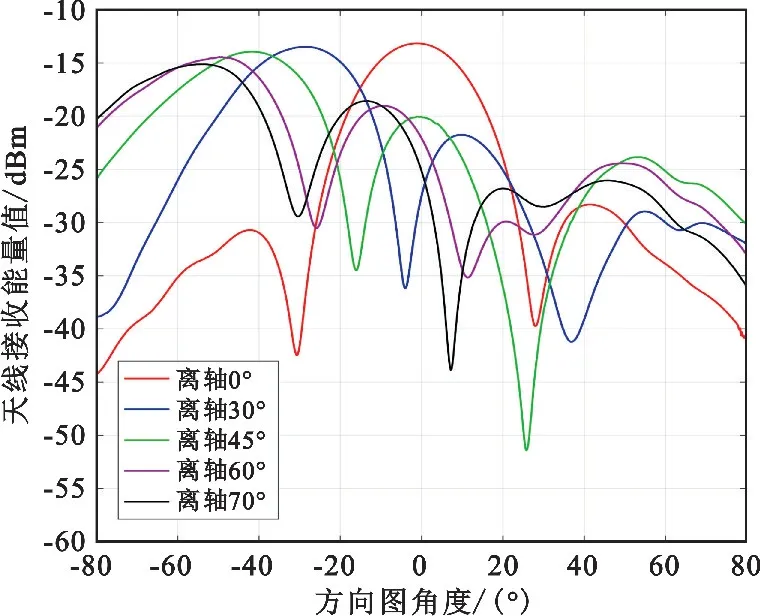
图2 天线接收扫描方向图
由图2可见,各天线单元在空间已完成波束合成,形成指定方向的波束。由于频率较低,波束宽度较宽,随着离轴角在0°~70°范围内增加,波束宽度由24°增加至32.2°,旁瓣抑制能力由15.2 dB下降至3.5 dB。考虑到收发组件的移相存在量化误差,当离轴角逐渐增加时,波束指向偏差最大为16.6°。但由于波束宽度较宽,由指向偏差引起的接收增益损失最高不超过2 dB。此外,随着离轴角逐渐增加,接收增益跌落最大不超过5.4 dB。
总结以上参数可知,终端天线具有宽波束、低增益跌落特性。宽波束特性可有效弥补因卫星轨道误差及波束指向偏差对卫星跟踪的影响,当天线在波束宽度范围内发生指向偏移时,接收信号能量不存在较大跌落。此外,考虑到天线在不同位置姿态条件下跟踪卫星的波束离轴角度不同,低增益跌落也会保证接收能量的稳定。
2 步进跟踪
步进跟踪利用卫星在用户链路下行传输的信标,主要思想是:波束在指向范围内扫描,获取每个指向的信标能量,信标能量最大时对应的波束指向即为卫星跟踪的指向。本节首先讨论终端天线位置姿态不变时的静态跟踪,分为粗跟踪和精跟踪两个过程,分别在2.1和2.2节介绍。粗跟踪以较大的步进扫描,确定粗略的波束指向。精跟踪在粗略指向附近以较小的步进确定精确指向。在静态跟踪基础上,2.3节将进一步讨论天线位置姿态改变时的动态跟踪方法。
2.1 粗跟踪
静态跟踪是动态跟踪的基础。在静态跟踪中,粗跟踪获取波束指向的粗略位置,决定静态跟踪时延和指向偏差,应重点考虑如下问题:
(1)波束指向范围的确定
由步进跟踪过程可知,最终的波束指向是指向范围内信标能量量化值最大时对应的波束方向。以图2为例,假设波束指向范围局限在天线方向图旁瓣指向附近,当信标接收电平超过跟踪接收机灵敏度时,跟踪接收机判决信标信号存在,粗跟踪波束会指向旁瓣。当离轴扫描角度较小时,旁瓣抑制能力较强,接收增益损失较大。为避免接收增益损失,粗跟踪的波束指向范围应为空间扫描全域,即离轴角为0°~70°,旋转角(波束指向在天线阵面的投影与固定参考方向的夹角)为0°~360°。
(2)波束指向步进的确定
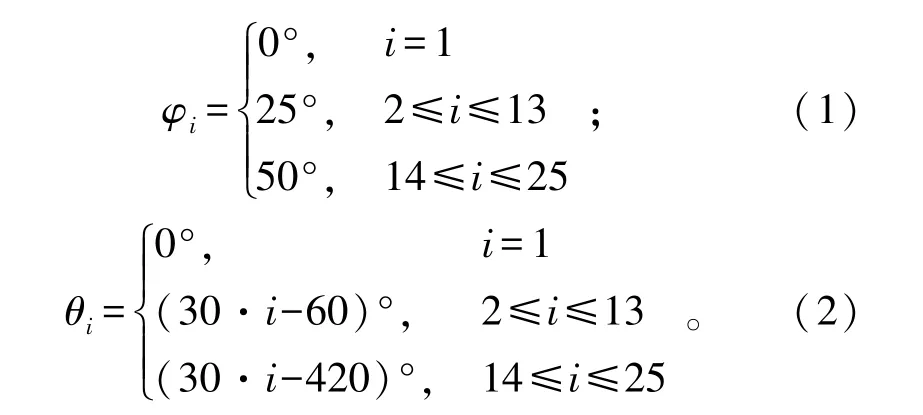
指向步进直接决定比较的信标能量数量:若指向步进较小,将增加跟踪时延;若指向步进较大,可能因信标接收能量小于接收灵敏度而无法确定波束指向。综合考虑指向步进与跟踪精度的关系,确定指向步进为波束宽度:离轴角取25°,旋转角取30°。因此,需要扫描的波束指向共有25个。记i表示波束指向序号(1≤i≤25),第i个波束指向的角度为(φi,θi),其中,φi表示离轴角,θi表示旋转角,数值分别为
(3)多个信标频点的处理
多波束卫星网络采用多个点波束代替宽波束覆盖,通过改变波束指向和波束宽度,动态改变波束覆盖区域,不同波束工作在频率复用模式。常用的频率复用方法包括三色复用、四色复用和七色复用等[9]。七色复用如图3所示,不同颜色及编号a~g代表不同波束频率。随着复用颜色数的增加,频带内被划分为子带的数量增加,频谱利用效率降低。对于多波束卫星网络,当波束数量一定时,复用颜色数越多,系统吞吐量越低,但不同波束间的干扰减小[10]。
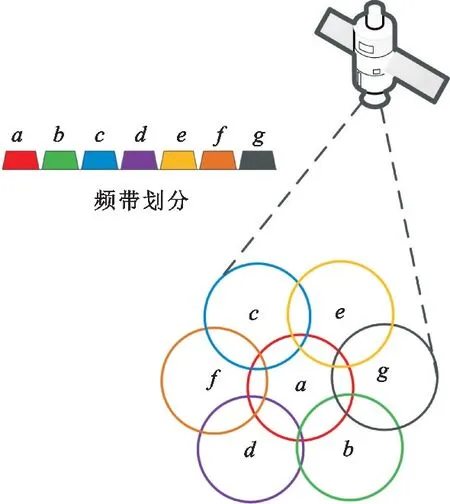
图3 多波束卫星通信网络的七色频率复用
由于不同波束覆盖可能重叠,终端天线会同时接收多个频点的信标,不同频点的信标能量不同。在波束扫描的过程中,若在每个波束指向均捕获多个频点的信标,进行多个信标的能量比较,则确定跟踪指向的时延较长。考虑到卫星网络的波束覆盖范围较广,一般而言,不同波束指向接收能量最强信标所对应的频点是相同的。因此,为降低跟踪时延,仅在不同波束指向比较最强信标的能量量化值。
粗跟踪流程如图4所示。本文考虑7色复用的多波束网络,7个信标频点为fj(1≤j≤7)。在波束扫描范围内,第i个波束指向接收频点fj的能量量化值为Ei(fj),则最强信标能量Ei,max应为Ei(f1),Ei(f2),…,Ei(f7)中的最大值,假设Ei,max对应的信标频点为fmax。由于在25个波束指向仅比较接收信标频点fmax的量化值,因此,粗跟踪最终确定的波束指向(φA,θA)为E1(fmax),E2(fmax),…,E25(fmax)中最大值所对应的波束指向。记波束指向为(φA,θA)时接收频点fmax的能量量化值为EA。
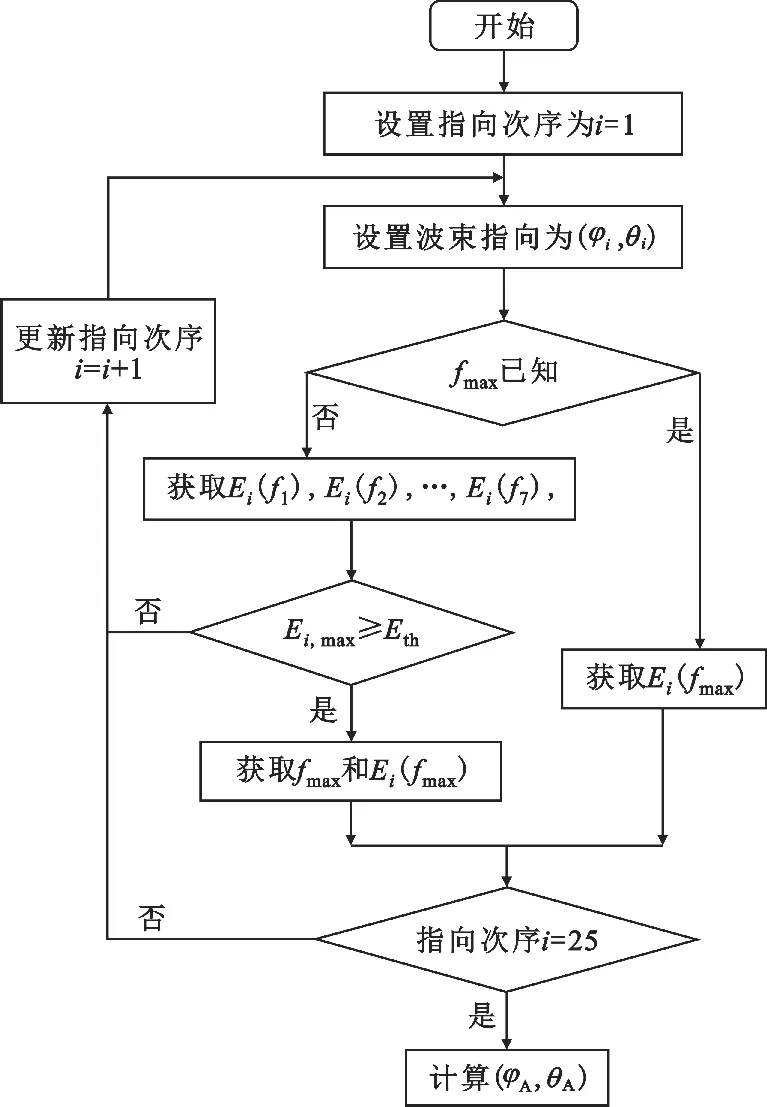
图4 粗跟踪流程
值得注意的是,对于跟踪接收机而言,频点fmax是未知的,需在任意第i个波束指向的7个量化值Ei(f1),Ei(f2),…,Ei(f7)中取最大值Ei,max得到。考虑到相控阵用户终端工作在S频段,与地面移动通信网络工作频段接近,为避免空间辐射杂散信号对频点fmax的判断产生干扰,设Eth表示信标量化阈值。当Ei,max≥Eth时,跟踪接收机认为fmax为有效的信标信号;当Ei,max<Eth时,跟踪接收机认为fmax为无效的信标信号。假设波束在指向范围内以次序号i增加的顺序进行扫描。在波束指向i,若接收机认为fmax有效,则在波束指向i+1,接收机仅需接收频点fmax的信标信号,获得量化值Ei+1(fmax)。另一方面,在波束指向i,若接收机认为fmax无效,则在波束指向i+1,接收机仍需接收频点f1,f2,…,f7的信标信号,通过获得量化值Ei+1(f1),Ei+1(f2),…,Ei+1(f7)来判断fmax,跟踪时延增加。可见,尽早获取fmax是降低粗跟踪时延的关键。
2.2 精跟踪
在粗跟踪基础上,精跟踪在指向(φA,θA)附近做步进较小的波束指向移动,改变φA和θA,比较在不同指向时信标频点fmax的能量,从而获得静态跟踪的精确指向(φF,θF)。精跟踪指向步进选择离轴角为5°,旋转角为10°。由粗跟踪过程,离轴角步进为25°,旋转角步进为30°,(φA,θA)是所有25个波束指向中信标能量最强的。因此在精跟踪中,离轴角和旋转角的变化范围分别是φA-20°~φA+20°和θA-20°~θA+20°。可见,相比于粗跟踪,精跟踪的指向范围变小。
在粗跟踪中,为避免(φA,θA)指向旁瓣,信标能量是在离轴角和旋转角两个维度同时比较的。考虑到(φA,θA)的指向偏差已经较小,在精跟踪中,信标能量的比较仅在旋转角或离轴角单个维度进行,以降低跟踪时延。首先,离轴角为φA保持不变,通过旋转角步进改变θA,进而确定θF。然后,旋转角为θF保持不变,通过离轴角步进改变φA,进而确定φF。以旋转角为例,精跟踪流程如图5所示。

图5 旋转角精跟踪流程
2.3 动态跟踪
2.1 和2.2节所述静态跟踪的主要思想是通过比较不同波束指向的信标能量,找到信标最强的方向作为波束指向。当天线位置姿态不同时,静态跟踪的波束指向也不同。因此,动态跟踪的处理方法是将天线位置姿态的变化划分为若干阶段,在每个阶段,天线位置姿态保持不变,波束指向由静态跟踪获得。下面根据天线位置姿态变化的不同时刻讨论动态跟踪方法。
(1)若天线位置姿态变化时,静态跟踪结束,则位置姿态的变化会引起信标能量下降,应再次进行静态跟踪。由于跟踪过程需要进行波束扫描,业务通信会暂时中断。考虑到卫星通信链路有一定裕量,同时,不同业务对接收信号信噪比的要求不同,为避免天线位置姿态的变化导致业务中断,可根据链路裕量及通信业务确定阈值,当信标能量大于阈值时保持原有波束指向不变,当信标能量小于阈值时重新进行静态跟踪。
(2)若天线位置姿态变化时,静态跟踪未结束,波束仍处于扫描寻星阶段,则天线位置姿态的变化可能带来波束指向偏差。例如,考虑天线的两种位置姿态状态S1和S2,在这两种状态下分别进行粗跟踪时,最终波束指向对应的序号为i1和i2(i1>i2)。考虑如下过程:在粗跟踪中,当天线扫描到序号大于i2的波束指向时,状态由S1变化到S2。此时,粗跟踪波束指向可能产生偏差。为避免波束指向偏差,在通过能量比较获得粗跟踪指向(φA,θA)及其对应能量量化值EA后,应再次获得该指向的量化值。若较EA下降较大,重新执行粗跟踪过程。另一方面,当天线的位置姿态变化在精跟踪过程中发生时,粗跟踪获得的指向角度(φA,θA)不再准确,精跟踪扫描范围扩大,跟踪时延增加。
2.4 跟踪时延影响因素
对于卫星跟踪,一个重要的评价指标是其由开始跟踪卫星至波束指向卫星的跟踪时延。在程序跟踪过程中,由于波束指向是在天线位置姿态和卫星位置已知的条件下计算得到的,因此跟踪时延和惯性器件获取天线位置姿态的时延有关。与程序跟踪不同,步进扫描跟踪采用比较不同波束指向接收卫星信标能量量化值的方法,因此与扫描范围和扫描步进相关。特别地,在本文考虑的多波束卫星网络中,跟踪时延还与终端天线的初始位置姿态相关。这是由于当初始位置姿态合适时,粗跟踪扫描寻星的初始波束指向(法向除外,例如波束指向φ2=25°,θ2=0°)偏差较小,在7个不同频点中,将有较大概率存在接收能量量化值大于Eth的频点,从而尽早获得有效的信标频点fmax,降低跟踪时延。
3 实验验证
实验验证的跟踪卫星选择轨道倾角较小的同步轨道卫星。终端天线的跟踪接收机选择16位的模数转换对信标接收能量进行量化,因此量化值的范围为0~65 536。量化值越大,信标接收能量越强,用户终端进行语音、视频等业务通信时效果越佳。在室外空旷环境,保持终端天线位置姿态不变进行程序跟踪,不同实验环境情形(不同时间、地点、天气等)接收七色复用波束信标频点的能量量化值如图6所示。由图6可见,在多波束卫星网络中,由于波束覆盖范围和波束指向的差异,终端天线接收不同频点信标信号的能量不同。考虑到同步轨道卫星单个波束的覆盖范围较广,一般而言,能量最强的频点在不同情形下相同,本实验为频点2。

图6 程序跟踪条件下不同频点信标的能量量化值
在情形1的条件下保持终端天线的位置姿态不变进行步进跟踪,扫描寻星过程中在不同波束指向接收频点2的信标能量量化值变化如图7所示。在图7中,当波束指向序号为1~25时为粗跟踪,信标能量在波束指向(φA=50°,θA=60°)时达到最大值。当波束指向序号为26~33时,波束扫描为精跟踪,不同波束指向序号对应的离轴角和旋转角如表1所示。结合图7和表1可见,与粗跟踪相比,精跟踪通过较小的步进角度,将信标接收能量进一步提高,量化值在波束指向(φF=50°,θF=70°)时达到整个步进跟踪的最大值。

表1 精跟踪过程的离轴角和旋转角
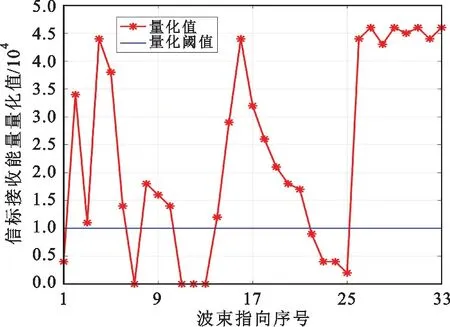
图7 步进跟踪扫描寻星过程中的信标能量量化值变化
如2.1节所述,设置量化阈值Eth的作用是防止空间辐射的电磁信号对信标接收产生干扰。当量化阈值选择过大时,有效频点fmax的信标信号会误处理为干扰信号或背景噪声,从而增加跟踪时延;当数值过小时,干扰信号或背景噪声会误处理为有效的信标信号,可能导致fmax判断错误。量化阈值的具体数值和终端工作的电磁环境相关。经过多次实验比较,在情形1的条件下,量化阈值Eth设置为10 000。由图7可见,在波束扫描至第2个波束指向时,信标能量量化值大于阈值,频点fmax锁定。假设在每个波束指向获取单个频点信标能量的时间为1.5 s,在波束指向1和2时跟踪时延均为10.5 s,在波束指向3~33时跟踪时延均为1.5 s。
此外,在图6中,信标能量是当波束指向为程序跟踪执行角度时得到的,该执行角度是由终端天线的位置姿态信息和卫星位置计算而来。从理论上分析,程序跟踪时的信标接收能量应大于步进跟踪;从实验结果分析,步进跟踪的接收能量略高于程序跟踪,原因可从两方面解释。一方面,对于倾角较小的同步轨道卫星,其星下点轨迹近似可看作以赤道为中心的“8”字形,南北纬的最大偏移与轨道倾角相关。为简化波束执行角解算过程,程序跟踪将同步轨道卫星视作星下点轨迹固定为赤道某个经度的静止轨道卫星,因此,波束指向会产生误差,仅当卫星的星下点轨迹在赤道上时误差为零。另一方面,由图2可知,终端天线在波束扫描离轴角较大时存在指向偏差,当波束指向程序跟踪的执行角时,接收增益可能不为扫描范围内的最大值。因此,步进扫描的波束指向可能获得更大的接收增益,进而得到更强的信标接收能量。
在静态跟踪验证完毕后,将终端天线置于车载平台上进行动态跟踪实验,在情形2的环境下,车载平台在相同的行驶路线上分别采用程序跟踪和步进跟踪,20 min内两种方法的信标接收能量量化值变化如图8所示。在前7 min,车载平台沿直线运动,程序跟踪信标能量基本不变,步进跟踪在2 min内完成波束扫描寻星后,以固定的波束指向跟踪卫星,信标能量的波动稍大于程序跟踪。在第8~17 min,车载平台连续转弯且卫星波束指向存在部分遮挡,同时由于惯性器件输出位置姿态信息存在迟滞,程序跟踪的信标能量变化幅度较大。由于车载平台的位置姿态不断变化,步进跟踪一直处于波束扫描寻星阶段,无法稳定跟踪卫星。在第17~20 min,车载平台恢复直线运动。由于能量最强频点已锁定,步进跟踪在进行约1 min的波束扫描寻星后,性能接近程序跟踪。从实验结果分析,本文提出的步进跟踪方法可作为载体位置姿态变化较小时的一种有效卫星跟踪方法。

图8 动态跟踪的性能比较
4 结 论
本文提出了一种在多波束卫星通信网络中的信标步进跟踪方法,仅比较单个波束的信标接收能量,通过粗跟踪和精跟踪两个步骤实现跟踪时延与指向偏差的平衡。实验结果表明,当载体位置姿态变化较小时,所提跟踪方法与程序跟踪性能接近,可作为载体位置姿态变化较小时的一种有效卫星跟踪方法,降低用户终端接入卫星通信网络时的业务中断概率。
