基于离散傅里叶变换的永磁同步电机驱动系统电流测量偏置误差在线补偿方法
2022-12-29张军张杰龙江
张军,张杰,龙江
(1.广州数控设备有限公司,广东广州 510530;2.哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨 150001)
0 前言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有效率高、功率因数高、动态性能优异等优点,已成为数控机床与工业机器人的重要执行部件。在PMSM驱动系统中,由相电流传感器电流测量误差引起的电流谐波将引起非理想电机转矩与转速脉动,影响PMSM控制性能[1-3],尤其是当电机连接有低谐振频率的外部机械系统时,还有可能导致精密机械设备(如轴承、驱动轴承或齿轮)损坏[4]。因此,消除相电流采样误差尤为重要。
在采用三相两电平逆变器拓扑结构的交流永磁同步电机驱动系统中,一般利用霍尔传感器或高精度采样电阻对相电流进行测量。而电流传感器的输出通常为电压信号,通过匹配的调理电路和噪声滤波电路将其转换至合适的电压范围,以便经过控制器的模数转换器并完成电流信息反馈。然而,受温漂、老化、器件容差和非线性等因素的影响[5],电流测量环节相关电路中的采样电阻和运算放大器等均会产生测量误差,使电流测量结果出现误差,并影响电机控制性能。
为简化分析,通常将电流测量误差分为电流测量偏置误差与电流测量比例误差两类,两者将分别导致频率为一倍电频与二倍电频的转矩或转速脉动。在实际工业应用中,电流测量偏置误差的影响大于比例误差,因此有关电流测量偏置误差补偿策略的相关研究受到学者的广泛关注[1-7]。为应对电流采样偏置误差影响,在实际工业应用中,通常在交流伺服或变频产品自整定环节中预先设置校准或自检环节,用以消除电流测量过程的直流偏置。然而,该消偏过程仅在电机运行之前进行一次,因此无法消除电机运行过程中由于温升和基准地变化等外界因素引起的电流测量偏置。为应对这一问题,文献[3]指出,研究相应的在线补偿策略势在必行。
目前,已有众多学者对电流采样偏置误差所导致的电流脉动进行分析,并提出具体解决思路。然而补偿策略却存在某些问题:首先,部分针对电流测量误差影响的分析仅对开环控制下的电流脉动幅值进行推导,并未对闭环控制对电流谐波幅值的影响进行深入分析。该问题使现有分析得到的谐波幅值并不等于所需补偿的实际电流采样偏置误差,导致欠补偿。此外,对于部分补偿方法,需要事先获得某些特定参数。如文献[6]中方法需要事先获得转动惯量参数,文献[7]中方法需事先获得定子电阻参数。若所需参数出现误差,则无法保证电流测量偏置误差的补偿效果,因此无法保证现有算法的鲁棒性与通用性。
基于以上分析,本文作者首先推导电流测量偏置误差对转矩脉动的影响;接着阐述了电流闭环与转速闭环对电流脉动幅值的影响;在此基础上,提出一种基于离散傅里叶变换(Discrete Fourier Transform,DFT)的电流测量偏置误差在线补偿方法。所提方法充分考虑了现有伺服产品中的初始消偏环节的优势与局限,并可做到自适应在线补偿。此外,所提方法无需提前获知任何电机参数,且具有理想的在线自适应补偿能力。为验证所提方法的有效性,本文作者将所提算法应用于存在电流采样偏置误差的商用数控机床永磁同步电机驱动系统上,实验结果表明:本文作者所提方法可有效抑制由电流采样偏置误差引起的转矩与转速脉动。
1 相电流采样偏置误差及其影响分析
对于三相两电平逆变器驱动的PMSM控制系统,其典型的相电流测量通路如图1所示(以a相电流为例)。由图1可见:相电流测量环节包含多种模拟器件与滤波环节是导致电流测量偏置误差的主要原因。
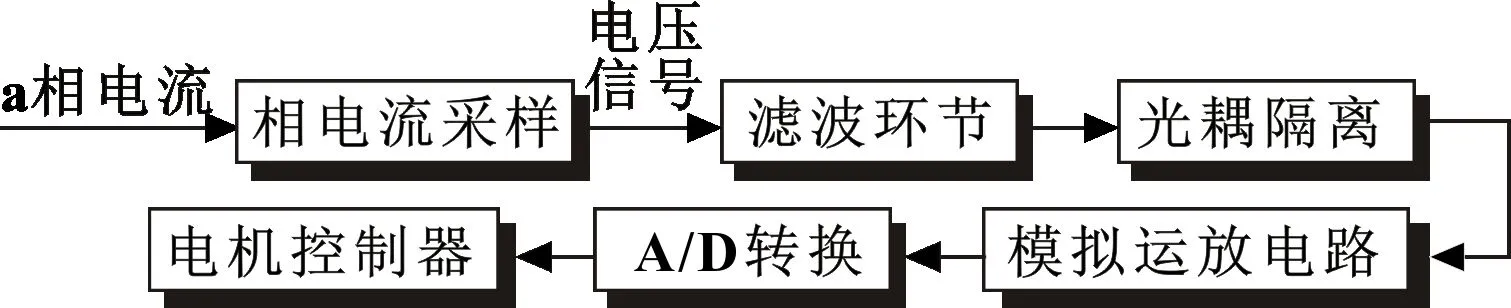
图1 a相电流测量环节
由于PMSM三相绕组为星形连接方式,因此控制器常采用两相电流测量方式。根据文中实验用控制器实际情况,实际测量相电流为a、b两相电流。当a、b两相测量电流存在偏置误差时,其测量得到的相电流为
ia_sample=ia+Δia_dc
ib_sample=ib+Δib_dc
(1)
其中:ia与ib分别代表a、b两相实际电流;ia_sample与ib_sample分别为控制器测量得到的a、b两相电流;Δia_dc与Δib_dc分别为a、b两相电流测量过程中的偏置误差。
根据基尔霍夫电流定律,控制器采样得到的c相电流为
ic_sample=-(ia_sample+ib_sample)
(2)
其中:ic_sample为控制器测量得到的c相电流。
(3)
其中:id_sample与iq_sample分别为控制器测量得到的三相电流经坐标变换后得到的d、q轴电流,设其表达式如下
(4)
其中:id与iq分别为三相实际电流经坐标变换后得到的d、q轴电流;Δid_err与Δiq_err分别为相电流测量偏置误差导致的d、q轴电流测量误差。联立式(1)—式(4),并通过三角函数变换公式可有
(5)
其中:γ的表达式为
(6)
根据式(5)与式(6)可知,当不考虑闭环控制对电流脉动幅值的影响时,电流采样偏置误差将给d、q轴电流带来频率为一倍电频、幅值相等但相位相差90°的电流脉动。
2 闭环控制对电流脉动幅值影响分析
值得注意的是,式(5)中有关结论并未考虑电流闭环与转速闭环控制对电流脉动幅值的影响。数控机床与工业机器人多采用表贴式永磁同步电机作为其执行机构,多采用id=0 A控制策略,较高的电流控制器刚度将对d轴电流脉动具有抑制作用。然而q轴电流指令是由速度控制器输出的具有相同频率脉动的谐波信息。即受电流闭环控制影响,式(3)中有关d、q轴谐波幅值的结论不再成立。此外,若假定电流环控制器理想,速度环PI控制器框图可简化为图2。
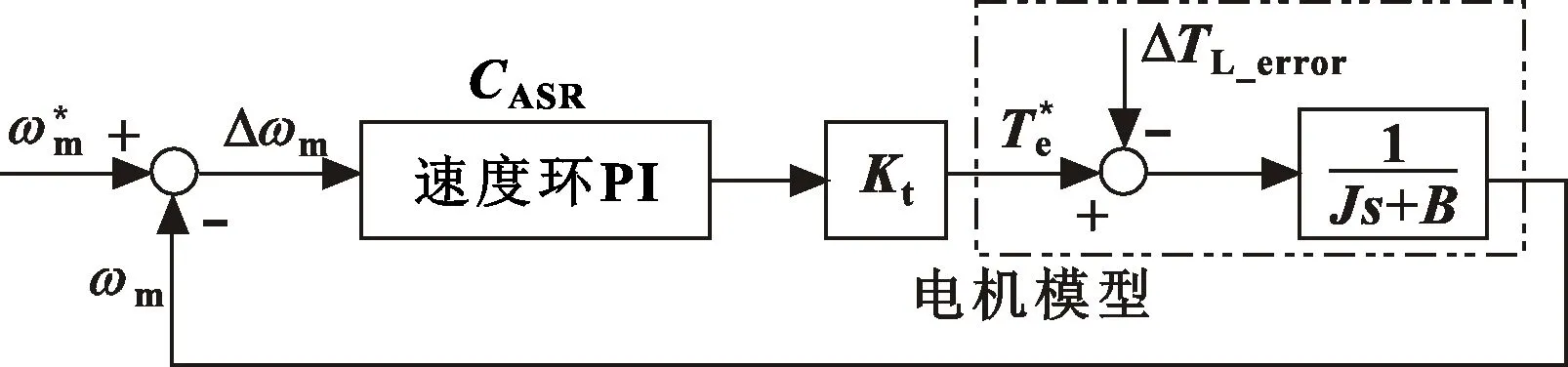
图2 速度环PI控制框图
(7)
其中:p0为极对数;ψf为永磁体磁链参数。
根据图2,ΔTL_error至Δωm的传递函数为
(8)
其中:M(s)的表达式为
(9)
CASR(s)的表达式为
(10)
其中:kps与kis分别为速度环比例(Proportional,P)与积分(Integral,I)系数。将式(9)与式(10)代入式(8),可有
(11)
由式(10)可以看出,不同的速度环PI参数将同样影响q轴电流谐波幅值。
综合以上分析可知,电流闭环与速度闭环均将影响实际电流脉动幅值,使式(5)中有关电流脉动幅值的推导不再成立。因此,进行相应的在线补偿具有很好的现实意义。
3 基于DFT的电流测量偏置误差在线补偿方法
由于商用伺服与变频器的初始化均具有电流采样消偏环节,即在控制器的初始化过程可保证电机运行前Δia_dc0=Δib_dc0=Δic_dc0=0 A,其中带有下标0的量代表电机初始化过程后的电流偏置。因此可认为电机运行过程中仍然存在的且频率为一倍电频的转矩脉动是由电机运行过程中温漂等非线性因素进一步引起的电流采样偏置误差,即Δia_dc=Δib_dc=Δic_dc。
因此式(5)可进一步改写为
Δiq_err=2Δia_dccos(θe+30°)
(12)
根据式(11)的结论,电流采样偏置误差Δia_dc可通过频率为一倍电频的q轴电流脉动Δiq_err进行表征。为此,本文作者通过对q轴电流进行DFT计算,实时提取频率为一倍电频的q轴电流脉动,并以此补偿相电流采样偏置误差。电机运行时,q轴电流反馈在一倍电频下的幅值Δiq_err的表达式为
(13)
其中:IRe和IIm分别代表DFT计算后的实部与虚部的幅值;N代表总采样点数;i为从0开始的正整数;k代表第k次DFT计算得到的q轴电流反馈中一倍频率为一倍电频的幅值;n为转换系数,其表达式如下
n=fe_base×N/fs
(14)
其中:fe_base代表一倍电频值;fs为电流环控制频率。
在实际应用中,为保证式(12)中的Δiq_err(k)结果尽量准确,应尽可能选择较多采样点数,即式(14)中n值应大于1。对于确定工况而言,fe_base与fs均已确定,为同时考虑运行工况快速性与Δiq_err(k)的计算精度,选取n值为大于5的正整数。
需要说明的是:DFT运算仅能体现Δiq_err(k)的幅值,并不能判断电流采样偏置的极性,因此在得到Δiq后,首先假设电流采样偏置为正,根据式(11)中结论进行反向补偿如下
(15)
其中:ia_sample_new和ib_sample_new分别代表电流采样偏置补偿后的a、b相电流。
为确定补偿方向,记首次电流采样偏置补偿后的q轴电流一倍基频幅值为iq1,在完成第一次偏置补偿后,再次对补偿后的q轴电流反馈进行式(13)中的DFT计算,计算结果记为Δiq2。比较Δiq1与Δiq2的大小:
(1)若Δiq1>Δiq2,证明反向为正确补偿方向;
(2)若Δiq1<Δiq2,说明反向为错误方向,应在式(15)的基础上进行式(16)所示的补偿
(16)
确定电流采样偏置的补偿方向后,为进一步优化一倍基频抑制效果,对补偿后的q轴电流反馈继续进行式(13)中的DFT计算,若得到的Δiq_err大于事先设定的阈值,则继续在确定的补偿方向进行相应补偿。
综合以上内容,可将文中提出的电流采样偏置误差在线补偿策略流程总结如图3所示。采用文中所提方法进行电流采样误差补偿算法结构框图如图4所示。
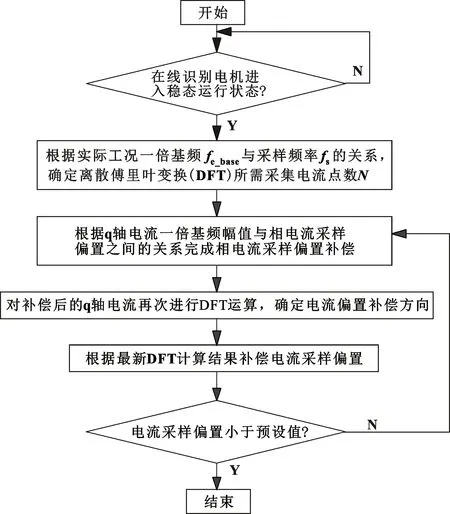
图3 电流采样偏置误差在线补偿流程
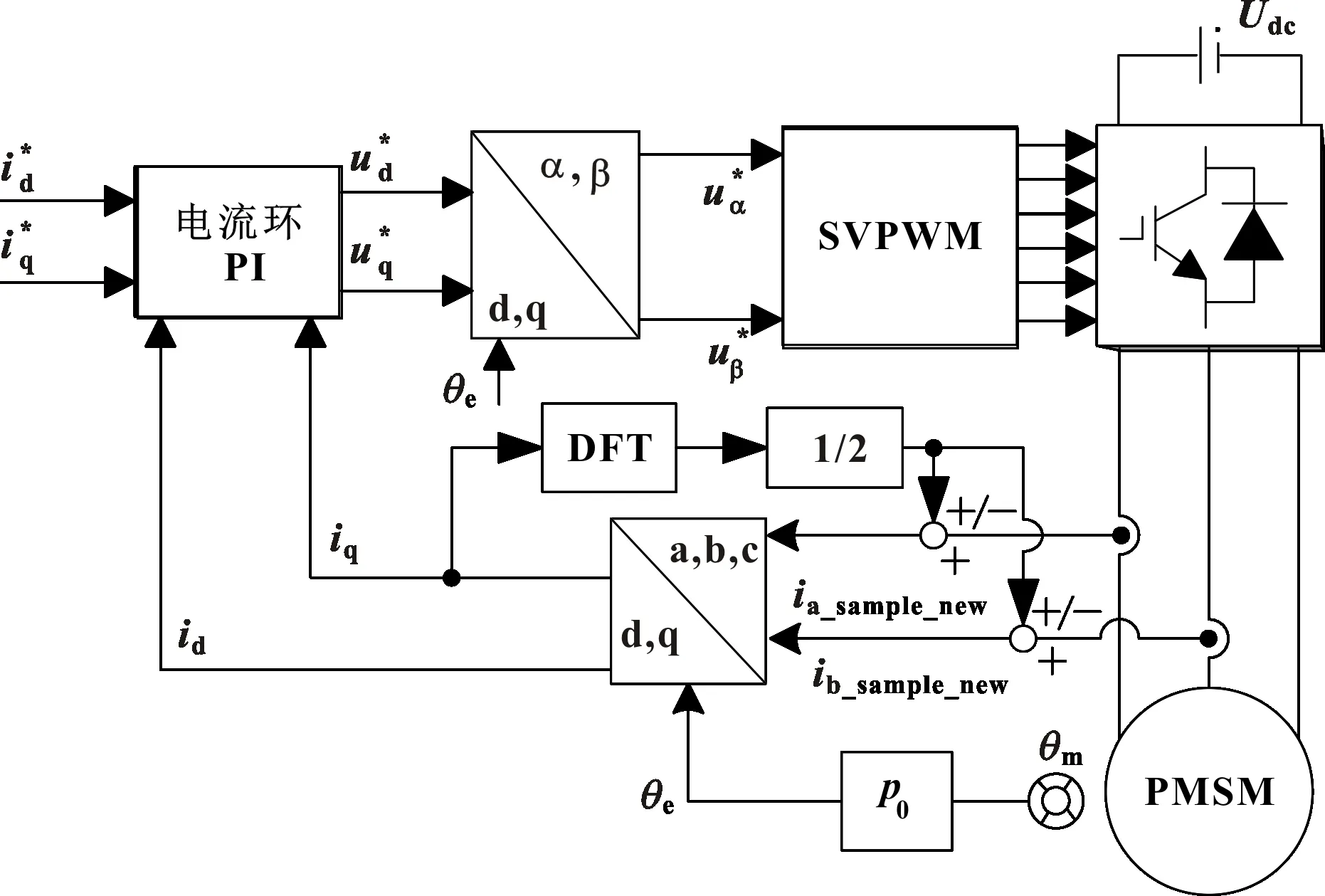
图4 电流采样误差补偿算法结构框图
4 电流采样偏置误差补偿实验验证
针对文中所提出的电流采样偏置误差补偿策略进行实验验证。采用如图5所示钰鸿 V-8立式加工中心的Y轴作为实验对象,其整套伺服系统均为广州数控设备有限公司现有产品。伺服电机型号为175SJT-MZ150D(A9II),主要参数如表1所示,伺服驱动器型号为机器人伺服GE2075T-LB1(主控芯片为德州仪器(Texas Instruments)公司的TMS320F28377s )。

图5 实验平台照片
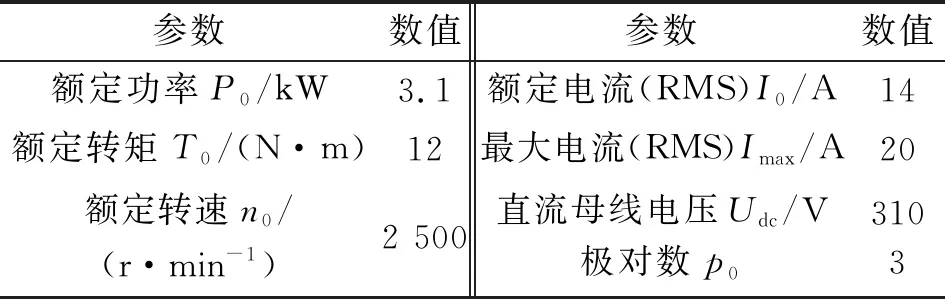
表1 实验用SPMSM主要参数
所使用伺服驱动器具有上电自动消偏功能,数控机床Y轴运行于转速±500 r/min工况下,电流采样补偿前q轴电流及其快速傅里叶变换(Fast Fourier Transform,FFT)分析结果如图6所示。

图6 ±500 r/min下电流采样误差补偿前iq的FFT分析结果
接着给出Y轴运行于转速±500 r/min工况下,电流采样补偿后q轴电流及其FFT分析结果如图7所示。
对比图6与图7可知:补偿后,q轴电流反馈中频率为fe_base处的电流脉动幅值降低了约82%。进一步地,给出数控机床Y轴运行于转速±500 r/min工况时,电流采样补偿前转速反馈及其FFT分析结果如图8所示。
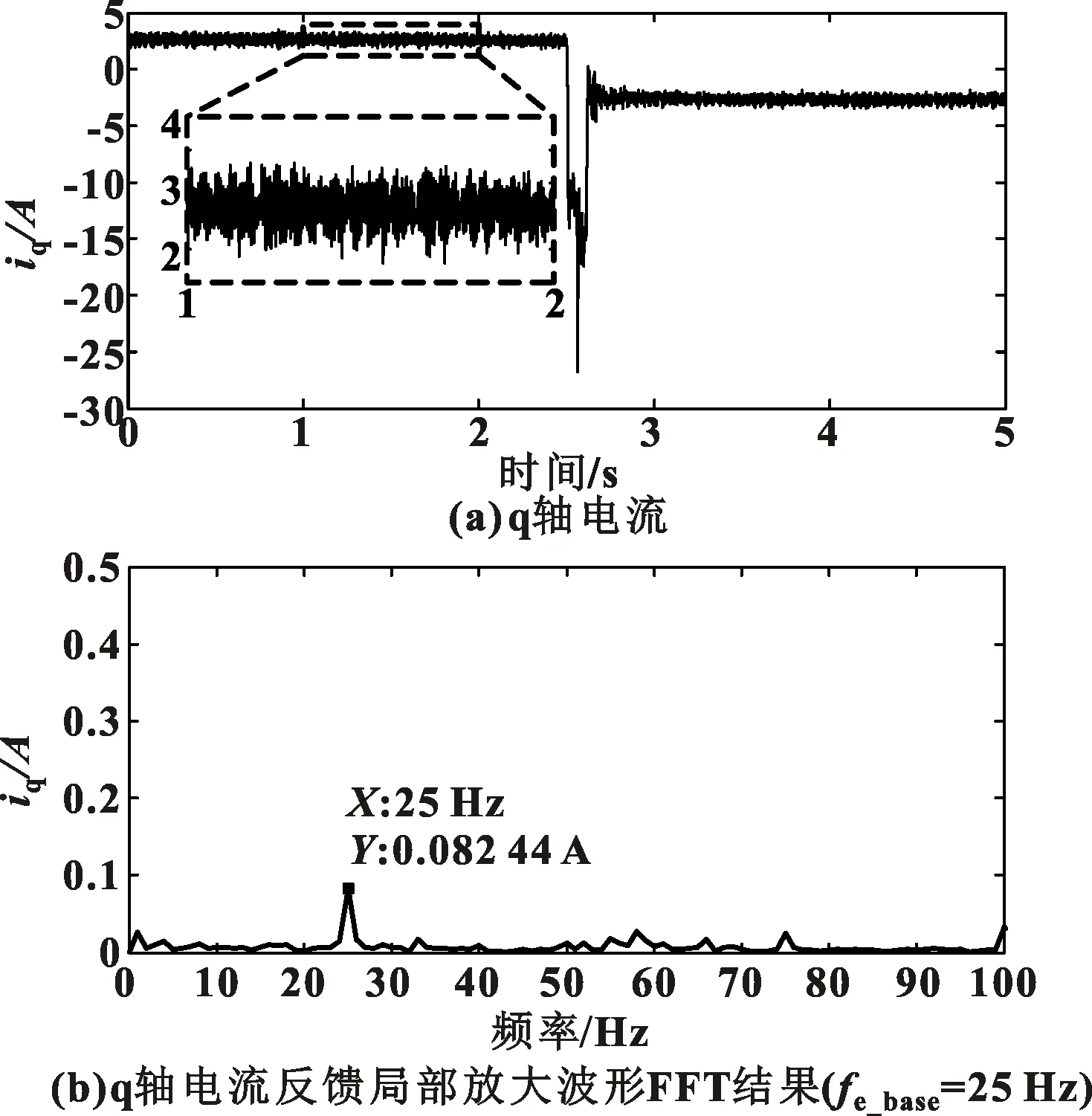
图7 ±500 r/min下电流采样误差补偿后iq的FFT分析结果
图8 ±500 r/min下电流采样误差补偿前转速FFT分析
接着,给出数控机床Y轴运行于转速±500 r/min工况时,电流采样补偿后转速反馈及其FFT分析结果如图9所示。
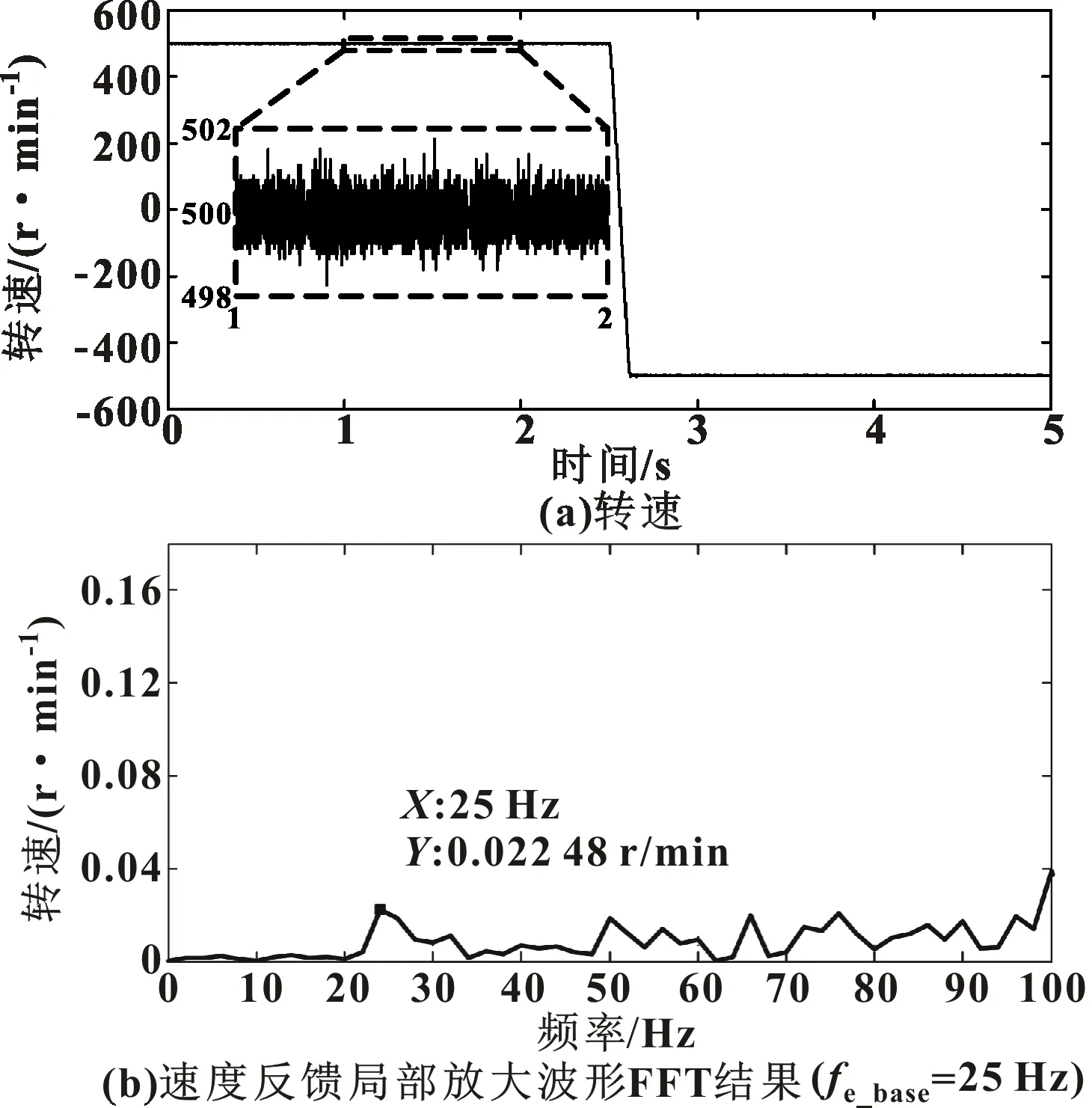
图9 ±500 r/min下电流采样误差补偿后转速FFT分析
对比图8与图9可知:补偿后,转速反馈中频率为fe_base处的电流脉动幅值降低了约86%。图6—图9中结果充分证明了文中所提算法的有效性,采用文中所提电流采样偏置误差补偿算法后,极大地抑制了伺服电机的转矩、转速脉动,提高数控机床各进给轴的运行平稳性,改善零件的加工效果。
5 结论
对电流采样偏置误差导致的d、q轴电流脉动进行了详细理论分析;并对电流变换与速度闭环对电流脉动幅值的影响进行了定性分析;基于分析结果,提出一种基于DFT的电流采样脉动补偿策略,对q轴电流脉动幅值进行提取并对相电流采样误差进行在线补偿;最后将所提方法应用于商用数控机床的交流永磁伺服控制系统中。实验结果表明:文中所提方法可有效抑制由电流采样偏置误差导致的一倍电频q轴电流与转速脉动,其抑制效果可达80%以上。
