基于气动软体驱动器的可穿戴手功能康复装置
2022-12-29李康毕学文李隆飞赵云伟
李康,毕学文,李隆飞 ,赵云伟
(1.北华大学工程训练中心,吉林吉林 132021;2.吉林石化公司电仪中心(检测中心),吉林吉林 132000;3.吉林石化公司电石厂,吉林吉林 132000)
0 前言
随着人口老龄化,由脑卒中和脑外伤引起的手部功能缺失患者逐年增加。近年来国内外学者针对家庭服务和医疗训练的手功能康复装置展开了广泛研究[1-2]。手功能康复装置多采用外骨骼结构关节拉线传动,其驱动方式主要有电机驱动、人工肌肉驱动和记忆合金材料驱动等[3-5]。采用传统驱动方式的手功能康复装置,结构和控制系统较为复杂,便携性差,难于实现手部关节自然运动[6]。
近年来新兴的气动软体驱动器其驱动装置与本体复合一体,气压下可实现连续的大角度变形[7-8],具有较好的综合柔性,适合作为手康复装置的手指驱动器。相对于传统的手部康复装置,采用气动柔性驱动器研制的手功能康复装置能够实现理想的手部关节运动,符合人体功能学,通过控制驱动器内气压即可实现手指屈、伸运动,可辅助手部运动功能缺失患者,适用于家庭服务和辅助康复训练[9-10]。而且它所需气体压力低,主动安全性、输出力可控,不会对人体造成伤害。
文中采用2种气动软体驱动器设计一种可穿戴式手功能康复装置。研究驱动器制作工艺,建立其形变模型,并进行静力学实验和有限元仿真;试制康复装置样机和搭建实验平台,进行其动作位姿和实物抓取实验。
1 康复装置的结构与功能
基于人体工程学原理,从仿生学角度出发,采用气动软体驱动器仿照人手外形设计一种手功能康复装置,其结构如图1所示。装置共有5根手指,具有6个自由度、1个机动度。其机械系统包含气动软体驱动器和织物手套。为增强康复装置夹持力,大拇指采用双腔驱动软体驱动器,其余4根手指采用单腔驱动软体驱动器。为便于穿戴,装置外部采用弹性织物材料。柔软体驱动器置于织物内部并位于手指上方,进气端与指根处固定,下端由腕带固定于手腕上。

图1 气动软体康复装置
气压下软体驱动器能够实现主动弯曲和被动恢复,它带动手指的屈/伸运动可帮助患者恢复手指功能和康复训练。在驱动器驱动下,各手指相互配合、协调运动,可实现人手抓、握和捏等主要功能,协助患者日常生活。
2 软体驱动器结构与建模
2.1 驱动器结构
图2所示为软体驱动器,其外形为长条状,内部为半圆形薄壁网络结构,各个腔室彼此相互独立,由底面(外侧覆盖纸质限制层)将各腔室连接成密闭整体,腔体底部设有通气道。单腔驱动器仅包含1个气腔和1个气道;双腔驱动器包含2个气道,由中间隔板将气室分成2个独立气腔。通入气压后腔室内壁膨胀变薄,在各个腔室端部产生轴向力,在限制层的约束下产生弯曲变形,带动患者手指运动,帮助患者进行手部运动功能康复训练。

图2 软体驱动器结构
驱动器以硅橡胶(Dragon skin 30)为原材料,采用模具一体注塑成形,其制作流程如图3所示。首先,配比硅橡胶,经搅拌均匀抽真空排出气泡后,将液态硅胶注入模具1,经固化后脱模完成驱动器气室部分;然后,将已完成模型导入模具2,再次浇注后经固化脱模完成气道及驱动型底部,并粘贴限制层,至此完成驱动器制作。驱动器具体结构参数如表1所示。

图3 驱动器制作工艺过程

表1 驱动器几何参数
2.2 变形模型
气动网络多气室弯曲软体驱动器采用超弹性硅胶材料,形变时呈现大变形、非线性。考虑到超弹性材料的各向同性和不可压缩性,采用两参数Yeoh模型描述气压下软体驱动器的形变[11]。其应变能密度函数为
W=C10(I1-3)+C20(I2-3)2
(1)
其中:
(2)
式中:I1、I2为变形张量不变量;λ1、λ2和λ3分别为轴向、周向和径向主伸长比;C10、C20为基于Yeoh模型硅胶材料系数。
施加气压后,软体驱动器产生类似圆弧状的弯曲变形,如图4所示。以驱动器底部为研究对象,当底部在外力作用下向轴向、径向和周向3个方向拉伸变形时,其轴向变形最明显,将该方向的拉伸比设定为λ1。由于驱动器气室的两侧壁厚和顶端厚度较大,限制了其变形,径向方向拉伸比λ2和周向方向拉伸比λ3相对轴向方向变化较小,故假设λ2和λ3[12]为
(3)
将式(3)代入式(2)可得:
(4)
基于应力和应变量能关系可得:
(5)
由图4所示几何关系可知,忽略限制层厚度影响,轴向方向拉伸比为

图4 驱动器弯曲变形
(6)
式中:l0为驱动器底面限制层弧长;l为变形后驱动器底部上表面弧长;θ为驱动器弯曲角度;R为驱动器弯曲半径。
驱动器各气室结构和参数皆相同,在气压p的作用下,单个气室的受力变形如图5所示。
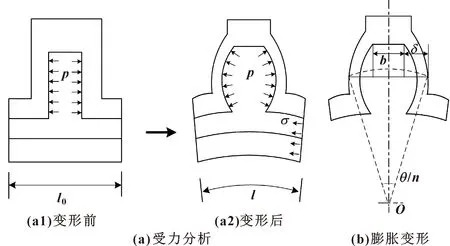
图5 单个气室形变分析
根据图5(a)所示气室底部所受力矩平衡可得:
(7)
将式(7)代入式(5)可得:
(8)
式中:S为气室膨胀后端面面积。
施加气压后,气室向两侧呈弧形膨胀鼓包,如图5(b)所示。假设其膨胀变形后为球面,忽略膨胀后壁厚影响,则S为
(9)
其中:
(10)
式中:r为气室变形后端面变形后球面半径;b为气室内腔长度;δ为气室膨胀高度;n为气室数目;K为比例协调系数。
基于式(8)可以推导出驱动器弯曲角度θ与输入气体压力值p之间的关系:
θ=θ(p)
(11)
3 实验与分析
3.1 驱动器形变
驱动器静力学实验系统如图6所示。由安装在驱动器端部的陀螺仪和测力计进行弯曲角度和输出力实验。实验中采用的硅胶材料为Dragon 30,其材料常数为C10=0.059 1、C20=0.011 3[13]。

图6 驱动器静力学实验系统
应用ABAQUS软件进行驱动器有限元仿真分析,结果如图7所示,气压下驱动器变形后呈圆弧状。不同气压下驱动器的弯曲变形如图8所示。可知:其弯曲变形随着气压的增加而增大。仿真和形变实验结果表明,驱动器在气压下产生类似指状弯曲变形且具有较好的柔顺性,适合作为康复装置的手指驱动器。

图7 有限元仿真结果

图8 驱动器弯曲变形随气压的变化(单位为MPa)
单、双驱动器比例调节系数K分别为4.9和2.2,将表1中驱动器各参数代入式(11)可得柔性驱动器弯曲角度与气压的关系,如图9所示。可以看到:驱动器弯曲角度随着气压的增加而增大。经比较理论计算结果与实验数据和仿真结果趋势一致,吻合性较好。由于双腔驱动器两个腔体之间存在隔板限制其弯曲变形,弯曲角度明显小于单腔驱动器。

图9 弯曲角度随气压变化 图10 正压力随气压变化
测试40岁健康男性左手大拇指和其余四指指端极限弯曲角度分别为130°和265°。气压下测试2种驱动器最大弯曲角度分别为185°和272°,均满足手指弯曲运动的需要。
图10所示为软体驱动器端部正压力与气压关系。可以看到:驱动器端部正压力随着气压的增加呈非线性增加,表明通过增加驱动器腔室内的气体压力可以控制和提升患手指的输出力。在通入气压为0.1 MPa之前,两种驱动器输出正压力几乎相当;当通入气压高于0.1 MPa后,随着气压的增加,双腔驱动器产生的正压力明显高于单腔驱动器。单腔驱动器指端0.18 MPa气压下产生正压力为4.2 N,双腔驱动器指端0.2 MPa气压下产生正压力可达到6.6 N,大拇指采用双腔驱动器可增加患者手部的抓持能力,以满足日常物品的抓取。
由上述驱动器形变实验和仿真可知,较低气压下驱动器即可产生自由连续、大幅弯曲变形,具有主动安全性,其弯曲角度和输出力均满足手指康复训练和日常生活需求。
3.2 位姿与抓取
图11所示为手功能康复装置实验平台。该平台主要由气源、控制系统和康复装置组成,通过控制系统发出指令,调节放置于织物手套内部手指上方的驱动器内通入气体压力使之产生弯曲变形,带动患者手部运动完成康复训练和物品抓取。实验中抓取物品参数如表2所示。

图11 康复装置实验平台

表2 实验物品参数
图12所示为气压下康复装置手指动作与位姿。将驱动器固定在模型手单根手指上方,施加气压后,可见模型手指在驱动器带动下产生弯曲运动,将它放置于织物手套内同样可驱动模型手指完成手指康复训练所需动作。通过驱动器的相互配合,可驱动手指实现ok、兰花指和握拳等动作,可见康复装置动作灵活、柔顺,能够辅助患者手部进行康复训练,实现抓、握和捏等基本功能。

图12 手指动作与位姿
图13所示为患者穿戴康复装置对物品进行抓取。未进行穿戴(空置时),气压下装置可自行完成物品抓取,如图13(a)(b)所示。在气压为0.1 MPa时,即可稳定抓取直径为83 mm的苹果和质量为517 g的水杯。当患者穿戴以后,在装置的辅助下,可以稳定抓取日常物品,如拾取水果和端水杯等。

图13 物品抓取
实验结果表明,文中采用气动软体设计的手功能康复装置具有较好的柔顺性、动作灵活和安全可靠,可用于辅助患者手功能康复训练,实现包括抓、握和捏等手部基本运动功能。
4 结论
基于2种气动软体驱动器设计了手功能康复装置,研究了驱动器制作工艺并获得了其气压下形变规律。通过控制驱动器气腔内气体压力,即可驱动手指完成屈、伸运动,辅助患者进行康复训练和实现手部基本运动功能。进行了驱动器静力学、装置位姿和不同物品抓取实验。经验证,该康复装置柔顺灵活、控制简单、安全可靠,其指端的弯曲角度和输出力均满足患者康复训练和日常生活需要,可稳定抓取直径为83 mm的苹果和质量为517 g的水杯。
