基于临空目标RCS预测的相控阵雷达资源自适应分配方法
2022-12-28谭贤四曲智国谢振华
段 毅 谭贤四 曲智国 王 红 谢振华
①(空军预警学院 武汉 430019)
②(95174部队 武汉 430000)
1 引言
临近空间高超声速飞行器(Hypersonic Gliding Vehicle, HGV),是指飞行在临近空间(20~100 km),速度超过1700 m/s的高超声速飞行器[1],这些飞行器具有飞行速度快、打击距离远、机动能力强、雷达截面积小等特点,给现有防空反导预警系统带来极大挑战[2];现有预警系统中传统雷达受制于转动惯量与天线增益限制,难以实现对该类目标有效探测,新程式相控阵雷达(Phased Array Radar,PAR)具有程式新、功率大等特点,可完成HGV的搜索、发现、跟踪等任务[3]。但同时HGV雷达截面积小、机动能力强,PAR在探测该类目标过程中将消耗大量资源,这将对雷达的搜索性能与跟踪容量产生不利影响。对雷达资源进行管理,在各目标间合理分配使用雷达资源,达到在资源允许范围内尽可能提升探测性能的目的,是减小上述不利影响,提升兵器性能的重要手段[4]。
根据雷达工作方式不同,相控阵雷达资源管理可分为搜索方式下资源管理[5–7]、跟踪方式下资源管理、成像方式下资源管理[8–11]等,本文重点关注跟踪方式下资源管理。跟踪方式下资源管理方面:文献[12]分别通过高效的启发式算法与建立模糊集方法优化任务驻留时间;文献[13]利用1阶马尔可夫决策过程(Markov Decision Process, MDP)预测目标RCS进而对雷达发射功率进行配置;Zhang等人[14]基于交互多模型,提出一种采样间隔优化算法;Zhang等人[15]利用模糊集模型,实现对调度间隔的自适应调整;Gilson[16]将目标跟踪精度与雷达资源消耗相关联,以跟踪精度作为目标函数计算雷达最小发射功率;Deligiannis等人[17]采用凸优化方法和非合作博弈论技术解决MIMO雷达功率自适应分配问题;韩清华等人[18]建立基于机会约束规划的雷达资源管理模型,解决多目标时雷达资源分配问题。上述方法分别通过调节采用间隔、任务驻留时间、雷达发射功率等参数对雷达资源进行管理,达到在雷达资源约束范围内提升跟踪性能(跟踪精度)的目的。但这些方法仅考虑了雷达(传感器)工作过程,未考虑目标影响,针对这个问题,Chavali等人[19]利用1阶马尔可夫过程对下一时刻目标RCS进行预测,进而对雷达功率进行分配;西安电子科技大学严峻坤等人[20,21]针对目标RCS未知情况提出一种基于非线性机会约束规划的功率分配方案;华中科技大学张贞凯等人[22],西安电子科技大学秦童等人[23]等利用隐马尔可夫方法预测目标RCS,进而对雷达资源进行分配,在实际运用中取得良好效果;Mertens等人[24]将目标RCS分解为常量和噪声分量进行估计,并针对斯维林Ⅰ型和Ⅲ型目标预测目标RCS。但上述方法仅针对常规气动目标,在状态转移模型[19,22,23]、目标RCS起伏[24]、雷达工作频段[20,21]等方面均与雷达跟踪HGV过程有一定差距,且这些方法均未考虑等离子鞘套影响,预测误差较大。针对这个问题,本文提出基于临空目标RCS预测的雷达资源分配方法,该方法根据滑窗内目标状态与RCS信息,利用贝叶斯后验概率公式预测下一时刻目标RCS,进而实现雷达资源的动态调整,使目标回波信号信噪比保持稳定,提高雷达跟踪性能。仿真实验表明,本文算法能较准确地估计出目标RCS,进而自适应分配雷达资源,达到在不增加雷达资源消耗前提下提升跟踪精度的目的。
2 基于临空目标电磁特性的雷达资源分配模型
2.1 临空目标电磁特性
决定目标电磁特性的因素有多种,其中目标外形起决定性作用。本文以HTV-2为例,首先根据目标3视图(图1(a))与缩比模型(图1(b))对目标进行建模如图1(c);在此基础上利用物理光学法(PO)计算HTV-2在X波段(10 GHz)各方位RCS如图2所示。

图1 HTV-2模型
由图2可以看出,HGV的平均RCS较小,仅有–16 dBsm左右;但起伏较大,在目标侧面、尾部等方向上起伏超过30 dBsm。由于目标RCS与电磁波入射角紧密相关,不妨将其记
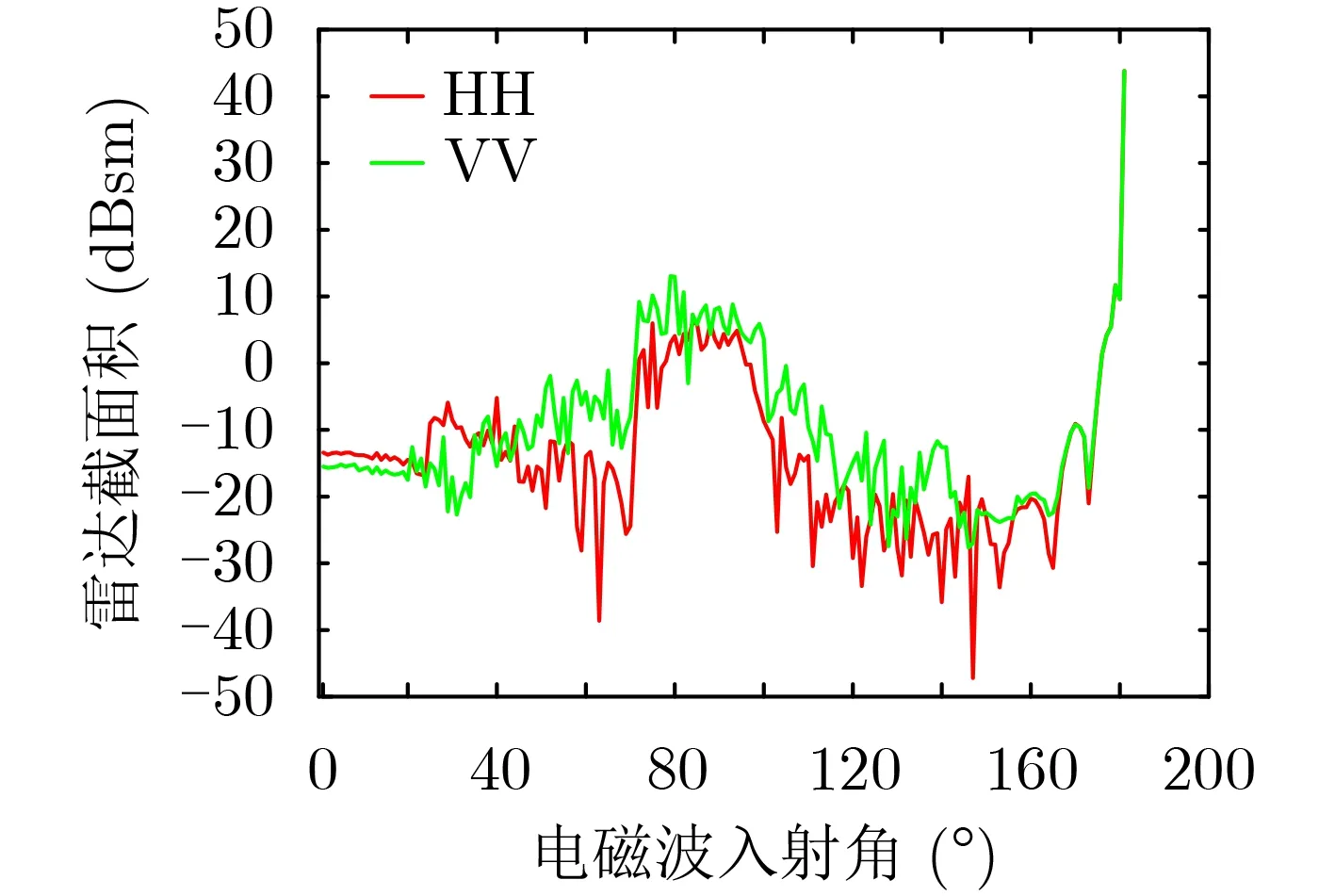
图2 HTV-2雷达截面积

除外形等因素外,HGV在高速飞行时会在飞行器表面形成一层由电离气体包裹的流场,即等离子鞘套,等离子鞘套能够折射或是衰减雷达电磁波,影响目标RCS[25]。据美国NASA在RAM (Radio Attenuation Measurements)[26]项目中实验结果可知,等离子鞘套对目标RCS影响与目标高度h与速度v紧密相关,将等离子鞘套影响可记
2.2 雷达资源分配模型
PAR探测HGV时处于TAS模式,该模式下雷达可通过时间分割、功率调整等方法分配资源[3,4],进而实现在资源允许范围内尽可能提升探测性能的目的;本文以时间分割法为例,采用量测误差协方差(Measurement Error Covariance, MEC)来衡量探测性能,则雷达资源分配模型可描述为

3 基于贝叶斯后验概率的RCS预测方法
3.1 预测步骤
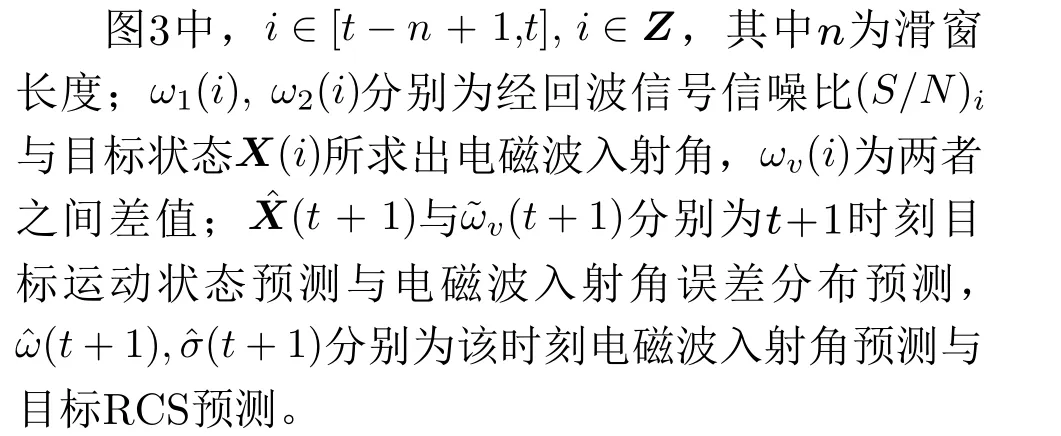
由第2节相关内容可知,要想对雷达资源进行配置需准确预测目标RCS,本节提出一种基于贝叶斯后验概率的目标RCS预测方法:该方法首先根据滑窗内目标状态与回波信息分别计算电磁波入射角,分析并统计两者之间差值,进而得出滑窗内电磁波入射角误差分布;然后基于下一时刻目标状态结合电磁波入射角误差分布预测下一时刻电磁波入射角;最后利用下一时刻电磁波入射角对目标RCS进行预测。其过程如图3所示。
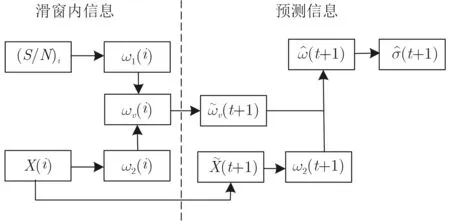
图3 预测步骤
3.2 预测方法



4 仿真分析
4.1 场景设置
临近空间高超声速飞行器飞行过程可简化分为火箭助推、跳跃滑翔、俯冲攻击3个阶段[30],3个阶段中火箭助推段目标距离较远,俯冲攻击段目标速度较快;因此对目标观测主要集中在跳跃滑翔段。假设某时刻敌方采用两批临空目标对我方进行突袭,分离点参数如表1所示;目标在高度为30 km时进入俯冲攻击段,根据飞行器受过载、动压、热流密度等约束[29]设置攻角变化如式(17)所示。

表1 分离点参数

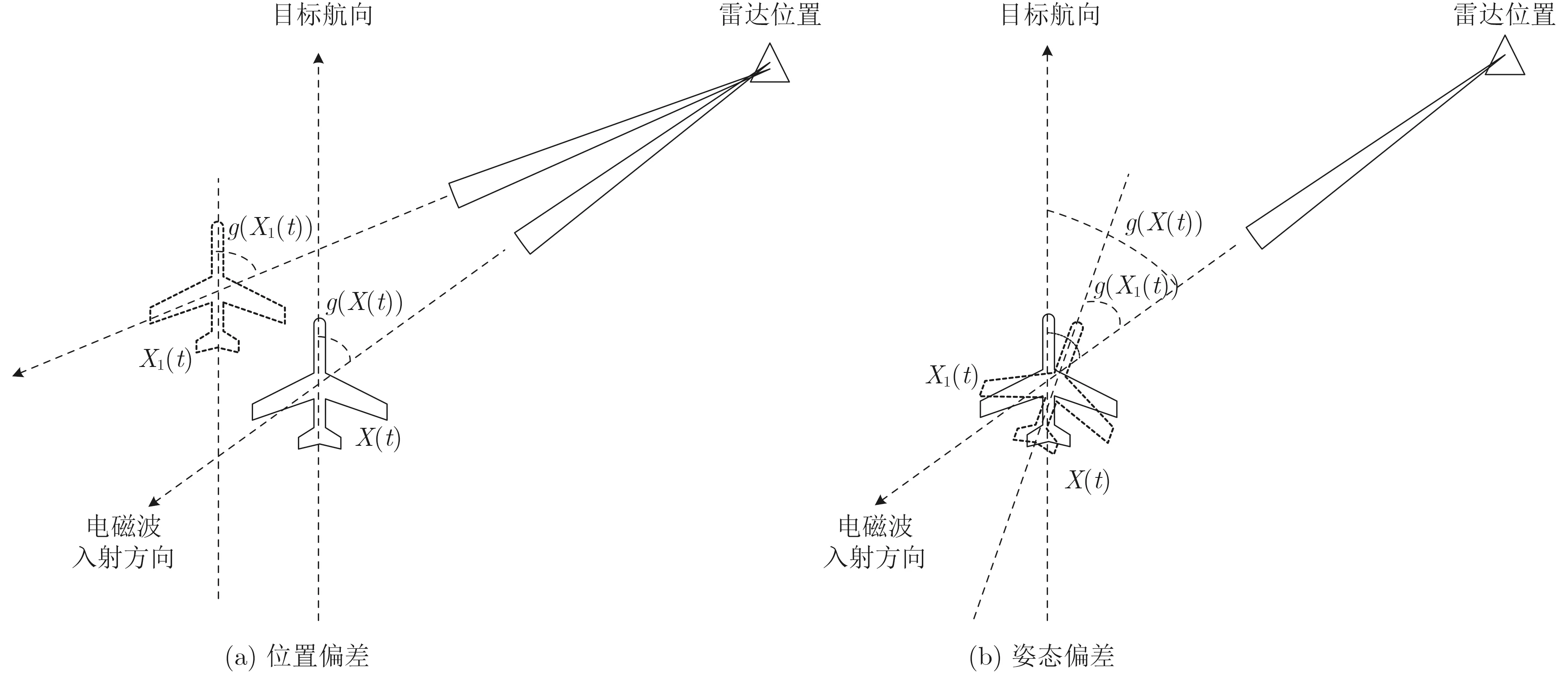
图4 入射角误差示意图
为探测上述目标,我方在东经118.04°,北纬28.26°附近部署1部相控阵雷达,雷达参数如表2所示,两批目标分别在时间段[551, 868]与[631.5,977.5]进入雷达探测范围,生成战场环境与责任区内目标RCS变化情况分别如图5、图6所示。

图5 仿真场景

图6 RCS变化

表2 雷达参数
4.2 算法性能比较
由于本文算法在计算过程中需要利用目标电磁信息,但在实际运用中目标真实RCS与事先获得的电磁信息存在一定出入,即存在一定量误差,误差大小对算法性能将产生很大影响,因此需要分析这些误差对算法性能的影响。


由表3可以看出,在雷达获取目标电磁信息较为准确时本文算法性能较优;随着误差增加算法性能逐渐变差,在γ= 0.4左右时本文算法性能将下降至与HM法接近。

表3 误差影响分析
进一步比较两种算法预测误差如图7所示(以γ= 0.2为例),由图7可以看出,在跟踪初始阶段由于滑窗长度较短,两种方法预测误差较大,但本文方法收敛速度明显快于HM法;在目标RCS起伏较小阶段(660~720 s)两种算法均有较高预测精度,在目标RCS出现起伏时(760~820 s)两种算法预测误差有所上升,但本文方法上升幅度明显小于HM法,验证算法有效性。
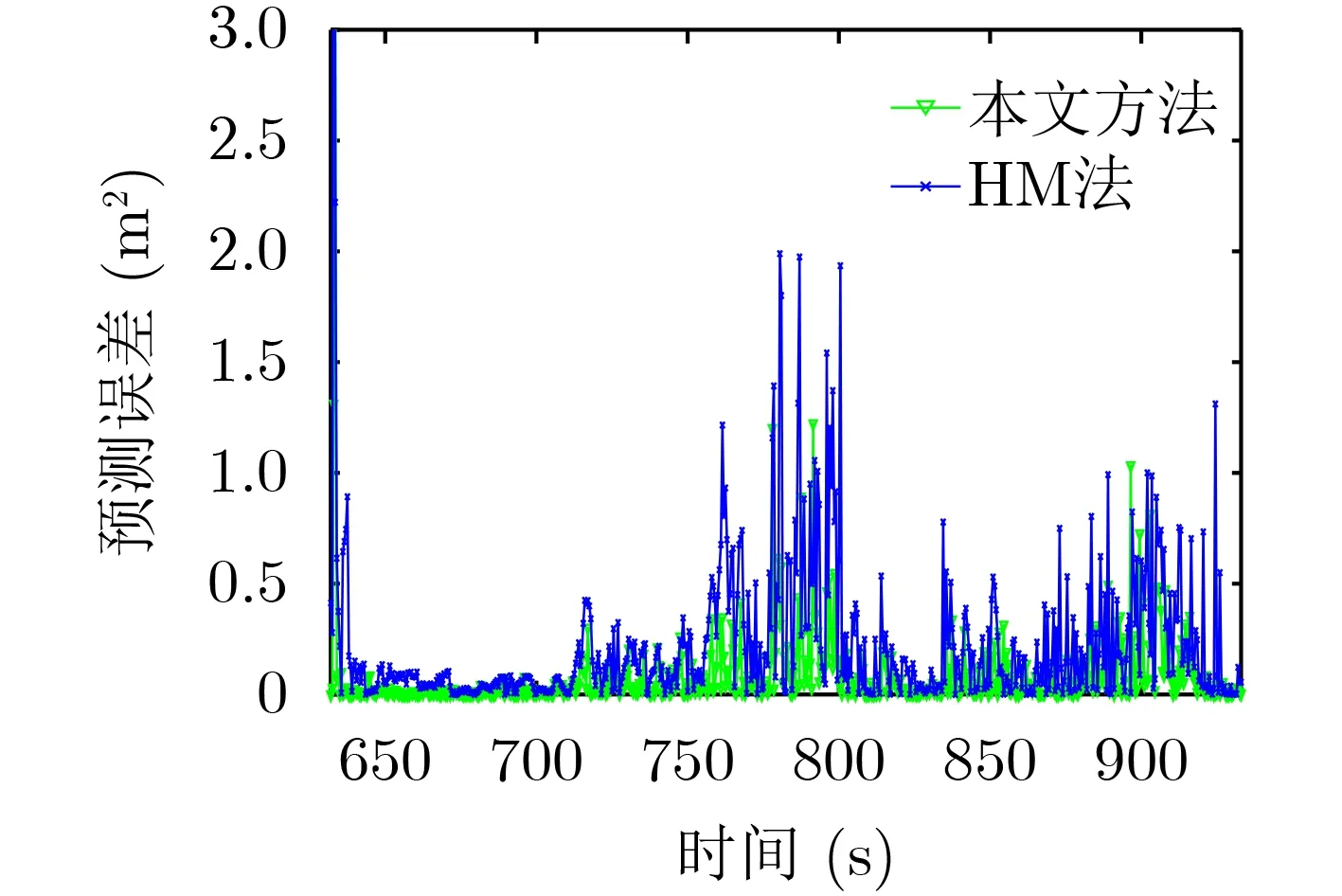
图7 预测误差比较
目标1结论类似。
4.3 雷达功率分配
分别利用固定资源分配方法(简称固定法)、HM法与本文方法对雷达资源进行分配,比较3种算法雷达资源分配结果如图8所示(以γ= 0.2为例)。由图8可以看出,与固定法相比,HM法与本文方法均能灵活分配雷达资源,但HM法分配结果相对较为“平滑”;由2.1节相关内容可知,HGV气动外形复杂、飞行速度较快,PAR跟踪该类目标过程中目标RCS起伏较大,而HM法无法有效适应目标RCS起伏较大或电磁波入射角变化率过快情况[23];本文方法充分考虑了临空目标电磁特性,能更加准确地预测目标RCS变化,其资源分配结果更为合理。

图8 资源分配结果
比较3种资源分配方法下雷达对目标跟踪精度如表4所示,由表4可以看出,在先验信息较为准确情况下,本文方法跟踪精度远高于其余两种算法,随着先验信息准确性下降算法性能逐渐变差,在先验信息误差较大(γ=0.4~0.5)时,本文方法跟踪精度将下降至与HM法接近。

表4 跟踪精度比较
5 结束语
针对相控阵雷达跟踪临近空间高超声速目标过程中资源分配不合理,无法最大限度发挥雷达探测性能的问题,本文提出一种基于临空目标RCS预测的雷达资源自适应分配方法。该方法充分利用滑窗内目标状态与RCS信息,采用贝叶斯后验概率公式预测下一时刻目标RCS,并针对性地调整发射脉冲驻留时长。仿真实验表明,与传统算法相比,本文方法能够较为准确地预测目标RCS,进而更加合理地分配雷达资源,实现不额外增加资源消耗前提下显著提升跟踪性能的目的。
