小行星星壤低速侵入过程力学响应的实验研究
2022-12-26孙启臣金敬福
张 熇,郭 璠,于 洋,孙启臣,赵 曾,金敬福,吕 雷
(1.北京空间飞行器总体设计部,北京 100094;2.北京航空航天大学宇航学院,北京 100191;3.北京航空航天大学航空科学与工程学院,北京 100191;4.北京卫星制造厂有限公司,北京 100094;5.吉林大学工程仿生教育部重点实验室,长春 130022;6.天津大学建筑工程学院,天津 300072)
0 引 言
近地小行星探测是21世纪国际深空探测的热点之一。目前已探明的近地小行星主要为碎石堆结构,表面通常存在星壤——由微米级尘埃到厘米级碎石组成的颗粒态介质。近10年来隼鸟号(Hayabusa)、隼鸟2号(Hayabusa 2)、OSIRIS-REx(Origins,Spectral Interpretation,Resource Identific-ation,Security,Regolith Explorer)等任务均成功对颗粒状星壤实现了采样。
在采样任务中探测器须与星壤接触,因此不可避免地会对星壤产生扰动。作为颗粒物质,小行星星壤与地壤、月壤、火壤等在形貌和组份具有一定的相似性,但由于小行星表面引力微弱,以及颗粒的离散性、颗粒间的摩擦和非弹性碰撞的非线性耗散特性,使得星壤可能会呈现出介于固体和流体之间的复杂力学性质。隼鸟号反演出小行星糸川(Itokawa)的星壤具有较高的强度,使探测器发生了反弹[1]。OSIRIS-REx探测器在采样过程中速度几乎没有减小,且星壤受采样器侵入发生了剧烈飞溅[2],表明小行星贝努(Bennu)的星壤强度很低。隼鸟2号利用携带的小型撞击器(Small carry-on impactor,SCI)在轨实施了星壤撞击实验,推断小行星龙宫(Ryugu)表面星壤强度极低,约为0.1 Pa~1.3 Pa[3]。这些任务结果表明,近地小行星表面的星壤强度存在极大的不确定性,可能很低(如贝努和龙宫),也可能较高,足以使探测器反弹(如糸川)。为应对星壤的不确定性,上述采样任务均采用一触即走(touch and go)方式,即探测器在与星壤接触仅几秒后就离开小行星表面,如OSIRIS-REx接触表面约6 s[4],隼鸟号和隼鸟2号接触表面仅1 s[5],这大大限制采样和原位探测的科学产出,也难以支撑未来小行星原位资源开发利用等活动的开展。
我国正在针对一颗直径约40~100 m的近地小行星2016 HO3,开展近距探测和采样返回技术研究[6]。为实现样品的可靠收集,延长表面停留时间、确定星壤承载特性及其与探测器的动力学相互作用,是亟待解决的关键问题。而目前土力学的常规宏观本构模型,一般无法直接用于解决微重力下的星壤响应问题。颗粒介质的动力学研究,在理论和数值仿真上还存在很多局限性。因此,可依据获取的小行星表面遥测数据,推断其表面物质组成,选用合适的模拟星壤原料,制备出物理力学属性相似的模拟星壤,引入包括重力水平、粒径级配、孔隙率、接触速度等真实物理参数,对探测器与星壤颗粒的实际物理作用过程开展深入的实验研究[7]。
1 相关实验进展
已有多个科研团队开展了理论和数值工作研究了小行星表面颗粒物质的行为。Ballouz等[8]和Thuillet等[9]分别对OSIRIS-REx采样过程和微型小行星着陆器着陆过程的星壤响应进行了分析,但均仅通过地面重力环境的实验对模型进行校验。目前专门研究微重力下星壤对侵入物响应的实验较少。Brisset等[10-11]以航天飞机、失重飞机、落塔等微重力实验平台,在不同的微重力水平下开展了厘米尺寸球形物体撞击毫米至厘米颗粒星壤模拟物的一系列实验,包括COLLIDE实验,在航天飞机和火箭上模拟了<10-4g重力水平,测试了撞击物以0.01~1.2 m/s速度撞击JSC-1,JSC Mars-1和石英砂模拟物的过程;PRIME实验,在抛物线飞机上模拟了<10-2g重力水平,测试了撞击物以0.04~2.3 m/s速度撞击与COLLIDE相同状态模拟物的过程;PRIME-D实验,在落塔内模拟了10-4g重力水平,测试了撞击物以0.07~2 m/s速度撞击奥盖尔(Orgueil)陨石模拟物的过程。这些实验研究了在不同微重力水平下撞击所产的溅射物的状态,结果表明随重力水平不同,溅射速度、溅射质量以及碰撞恢复系数、撞击穿透深度等均会发生变化。Gautier等[12]利用ZARM落塔测试了4 kg的1U立方星以0.15 m/s速度触碰碎石模拟物的过程,测量出碰撞恢复系数为0.26±0.03。Bui等[13]利用失重飞机模拟了0倍、1/6倍、1/2倍,1倍和2倍的地球重力加速度环境,测量了丰浦砂(Toyoura sand)和月壤模拟物FJS-1的承载强度,结果表明模拟物的极限抗压强度随重力水平的增加而增大,且FJS-1的增大趋势较丰浦砂明显,归因于两种模拟物的内聚力差异。EMPANADA实验[14]利用失重飞机模拟了地球、火星、月球和微重力的不同重力水平,采用光弹性颗粒物理可视化技术研究了一根柔性探针插入双粒径厘米级球形颗粒床的动力学过程,结果离散发生的粘滑失效(stick-slip failure)事件的大小和频率都随着重力加速度的增大而增加。
上述实验结果表明碎石堆小行星星壤的动力学行为与类地行星表面的星壤可能存在显著区别。然而,对研究采样、着陆等过程中星壤的响应,这些实验均存在不足。COLLIDE,PRIME和PRIME-D实验没有关注模拟物的响应,所测试的侵入速度绝大多数≥0.1 m/s,且撞击物的质量很小,不能真实反映较大质量的探测器以恒定低速下降的方式接触星壤的过程;Bui等进行的实验和EMPANADA实验重点研究的是不同重力水平对颗粒模拟物响应的影响,但实验中颗粒床采用平面二维设置,并没有研究和排除边界效应(boundary effect)的影响。此外,以往实验均没有关注星壤的承载特性,而承载特性是决定探测器采样与着陆安全的关键参数。
国内宇航领域在微重力实验和颗粒研究方面分别取得了一定成果。刘福才等[15]设计了一套基于单关节驱动的机械臂试验装置,开展了落塔微重力及地面重力环境试验,对比分析了电机驱动电流的差异,辨识了电机的摩擦参数,修正了机械臂动力学模型。耿动梁等[16]针对登月着陆器发动机羽流与月壤颗粒相互作用问题提出了一种新的流固耦合迭代算法,可获得羽流所扬起的月壤颗粒随时间的质量分布等,并依据阿波罗任务的在轨实测数据验证了算法的正确性。然而,国内对小行星星壤特性的研究鲜有报道,且尚未开展过相关的微重力试验。
2 微重力星壤力学特性落塔实验
为了在贴近真实的力学环境下探究星壤的响应,本文设计并开展了微重力星壤力学特性落塔实验,基于落塔精确地建立微重力环境,利用恒速加载的方式模拟探测器的着陆足垫或采样装置与星壤的接触过程,并在实验中通过测量加载力-侵入深度曲线直接获得星壤的承载特性;同时,实验设置较大尺寸范围的模拟星壤以减轻实验边界效应的影响,并通过测量边界的应力状态以监测边界效应的变化。本文的星壤研究对象为无黏性岩质星壤,其常见于近地小行星的表面。OSIRIS-REx观察到贝努撞击坑内的颗粒存在流动过程[17],表明星壤黏性很低。由隼鸟2号的SCI所形成的撞击坑直径推测,龙宫表面的星壤也主要由无黏性物质组成[3]。
2.1 实验平台设计
2.1.1落塔
实验使用中国科学院微重力重点实验室的落塔,高116 m,自由落体实验可获得3.6 s的微重力时间。使用单舱模式,微重力水平优于10-2g,最多可搭载70 kg实验载荷。本次实验使用的落舱如图1所示,由落舱底部安装的配电与通信单元为实验系统提供供电与无线通信功能。
2.1.2实验系统的硬件设计
实验系统的布局如图2所示,主要由真空罐、颗粒床、加载装置、控制单元、图像测量系统和力测量系统组成。真空罐能提供低于60 Pa的近似真空环境,可消除空气的黏性流体效应和水蒸气所产生的颗粒间作用力,降低对实验的干扰。罐体为圆柱形,柱面为全透明有机玻璃,可满足相机从罐外拍摄的需求。颗粒床能完全贴合并固定在真空罐内的底盖上,避免由于实验起始时的重力环境突变而导致的模拟物漂浮情况[12],尺寸为400 mm×300 mm×200 mm。加载装置安装在真空罐内的顶盖上,由控制单元控制,利用直线电缸提供驱动动力,能提供持续、稳定的匀速直线下压运动,加载行程100 mm,加载速度0~30 mm/s±0.02 mm/s可调。加载装置末端装有圆形的压盘,模拟探测器采样器或足垫外形。图像测量系统由2台黑白高速相机、1台彩色高速相机、LED灯和标定板组成,能够从不同角度实现对模拟物的形貌测量,利用反射镜缩短成像距离,可满足落舱的空间约束,分辨率1024×1024,帧率200 fps。力测量系统由位置传感器、压力传感器、土压力传感器、数据记录仪和锂电池组成。压力传感器用于测量加载力,为应变式传感器,量程50 N,1000 N可选,测量精度0.2%F.S.;土压力传感器用于测量颗粒床的边界压力,为BW箔式微型压力盒,量程30 kPa,精度0.5%F.S.。数据记录仪负责存储实验过程中的力测量相关数据,采集频率900 Hz。

图2 实验系统的硬件组成及布局图Fig.2 Hardware composition and layout of the experiment system
模拟物分为单一粒径和级配粒径两类。单一粒径易于实现实验状态的重复设置,便于后续开展仿真对比分析,考虑实验中可能存在的粒径效应[18],单一粒径设置了3 mm±0.6 mm和10 mm±2 mm两种。级配粒径更符合实际小行星表面情况,主要粒径的分布区间为10 mm~50 mm。模拟物重量25 kg,深度为0.12 m~0.16 m(取决于不同的孔隙率状态)。模拟物状态和级配粒径尺寸及质量占比情况如图3所示。模拟物颗粒是将200 MPa以上的高强度花岗岩进行破碎再分筛获得,颗粒的三轴尺寸a,b,c(a≥b≥c)通过抽样测量确认在统计趋势上符合b/a≈0.7,c/a≈0.4,接近于小行星风化层实际状态[19]。采用分层欠压法[20]对颗粒进行整备形成颗粒床。
Seguin等[21]的研究表明,地面重力下当颗粒床边长≥5倍侵入物直径时,无明显的边界效应,但不能确定微重力下是否适用,因此本实验将压盘的尺寸定为∅50 mm和∅100 mm。Miura等[22]的研究表明当土压力传感器的直径与模拟物的中值粒径的比值>5时,测量得到的土压力误差可以保证在5%以内,因此本实验针对粒径尺寸主要为3 mm的情况,选择的传感器的尺寸为∅28 mm×10 mm。
2.1.3实验系统的控制与测量设计
落塔落舱内的配电与通信单元为控制单元供电,并在落舱进入微重力时为控制单元提供触发信号。控制单元具备自动和手动两种控制模式,在实验前和实验后能手动调整加载装置;在实验中能接收触发信号自动按照预定参数控制加载装置,并能实时接收位置传感器和压力传感器的测量信号,在到达最大加载行程或超出加载能力时自动停止加载。数据记录仪存储落舱内的加速度测量数据、实验系统的位置传感器、压力传感器和土压力传感器的数据。数据记录仪中有统一的时间戳,确保数据采集的时间关联性。落舱吊入落塔顶端后,在中央控制室完成实验系统的状态设置工作,中央控制室可与配电与通信单元进行无线通信,实现实验前高速摄像系统的启动。
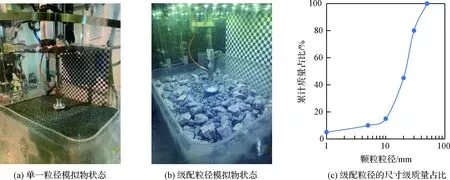
图3 实验中的模拟物状态Fig.3 Simulants used in the experiments
实验的测量项目如表1所示。在实验开始前通过真空计获得实验系统的真空度。在实验过程中通过压力传感器和位置传感器分别获得加载过程的加载力和加载位移,并利用土压力传感器获得颗粒床的边界应力情况,这些数据都记录在数据记录仪中。同时,在实验过程中利用高速相机的图像测量获得模拟物的形貌变化,数据记录在相机的内存中。
2.2 实验流程设计
在实验前,首先在地面完成真空罐的抽真空,通过控制单元手动调整使压盘距模拟物上表面约10 mm。然后将实验系统吊入落舱中,切换为落舱供电,控制单元和数据记录仪加电。之后将落舱升至落塔顶部。随后,在实验前倒计时2 s时,在中央控制室通过无线打开LED灯和启动高速相机采集。落舱释放,实验系统转入全自动工作,在释放后约0.2 s,微重力信号触发,加载装置启动,压盘开始下压。释放后约0.5 s至1 s压盘为空行程运动,目的是为了减轻落舱释放的振动对侵入过程的影响,同时也为加载装置从启动到匀速下压留有足够的时间。随着压盘持续地下压,加载装置在释放后约3 s达到最大行程或超过最大加载力而停机。在释放后约3.6 s落舱进入减速回收过程,至此单次实验结束,并在释放后约1 h完成落舱的回收工作。
2.3 实验工况设置
实验分7个工况开展,如表2所示,设置参数包括颗粒粒径、孔隙率、压盘尺寸和加载速度。在实验前,通过地面直剪实验测量了处于相同压实状态下的颗粒物的内聚力和内摩擦角。由于颗粒为碎裂的花岗岩,认为微观孔隙率可忽略,因此孔隙率约等于宏观孔隙率。

表1 实验的测量参数汇总Table 1 Summary of experiment measurement parameters
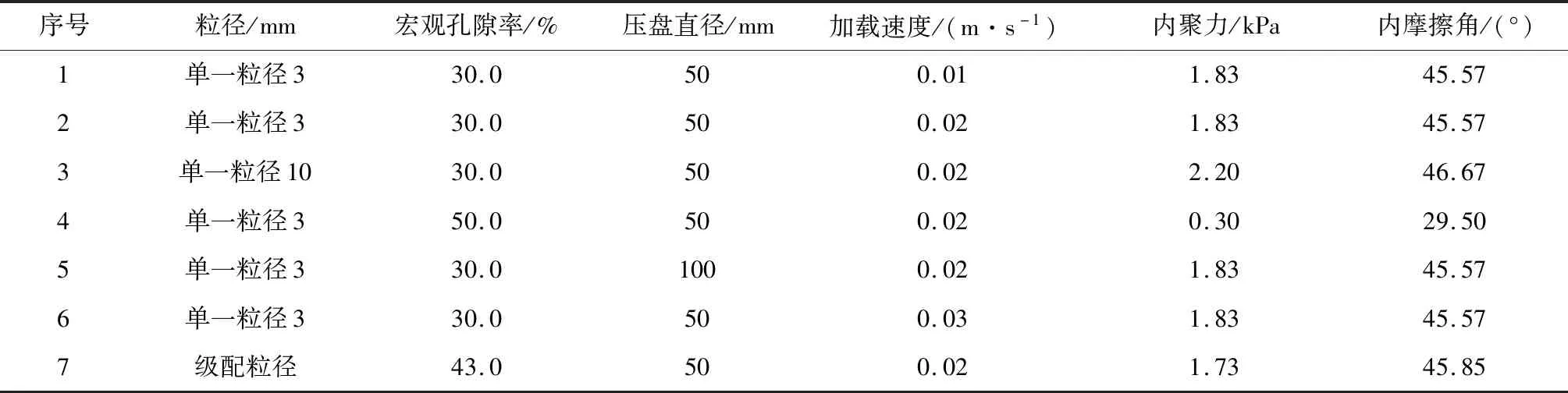
表2 实验工况参数设置汇总Table 2 Summary of parameter settings in experiment conditions
3 实验结果分析
3.1 实验现象
高速摄像获取了模拟物表面在压盘侵入过程中的形貌变化,如图4所示。每张图的上半部分为黑白相机1拍摄的图像,下半部分为彩色相机拍摄的图像。模拟物在压盘侵入过程中形成了一个圆形的撞击坑,其形貌的变化可分为两个阶段。第一阶段,颗粒飞溅过程:从压盘接触模拟物表面(图4(a))开始,压盘推动其周围的颗粒沿压盘径向向外飞溅,结束时,飞溅的颗粒落回模拟物表面,在压盘的周围隆起并形成撞击坑(图4(b))。第二阶段,颗粒滑落过程:压盘继续下压,撞击坑持续隆起且直径不断扩大(图4(c)),撞击坑边缘的颗粒不断向撞击坑内滑落,直至压盘停止加载。图4(b)和图4(c)列中的曲线为撞击坑的拟合结果。在该阶段侵入的后期,可明显观察到表面颗粒存在周期性的振荡现象。撞击坑形貌的变化与加载力曲线的趋势存在对应关系,颗粒飞溅过程对应了曲线初始峰值的产生过程,在压力降低到接近为零时颗粒飞溅结束,随后压力缓慢增大,撞击坑直径随之不断扩大。

图4 工况2实验中撞击坑的形成过程。Fig.4 Formation of the crater in the No.2 experiment
3.2 重力水平对承载力的影响
每一个实验工况均分别进行了重力环境与微重力环境实验。典型工况的加载力-侵入深度曲线如图5所示。图6所示为模拟物的变形模量,可反映模拟物抵抗变形的能力。结果表明,相同星壤级配、相同压盘、相同速度下,发生相同位移时,星壤的承载力在微重力下比在常重力下降低了一个数量级以上。

图5 微重力和地面重力条件下工况2和工况3的加载力-侵入深度曲线Fig.5 Loading force vs.intrusion depth curves of the No.2 and No.3 experiments under microgravity and Earth gravity

图6 地面重力与微重力下模拟物的变形模量对比Fig.6 Comparison of the deformation modulus of the simulants under the Earth gravity and microgravity
3.3 影响承载强度的因素
依据初始压力起始点截取了有效数据段,绘制的加载力-侵入深度曲线如图7所示。按粒径不同,分为两大类特征:3 mm粒径的曲线存在明显的整体趋势,有局部的小幅度振荡。其中低孔隙率的工况1,2,5,6中,载荷在初期具有一个显著且短暂的峰值,但迅速降低至几乎为零,然后随着侵入深度的增大而缓慢增加;高孔隙率的工况4中,载荷在初期没有峰值,一直随着侵入深度的增大而缓慢增加。10 mm粒径和级配粒径的曲线存在明显的整体振荡,每次振荡都伴随着一个载荷峰值的出现,但然后迅速降低至几乎为零。
利用不同的工况,比较加载力-侵入深度曲线随单一工况参数的变化规律。为便于对比,对曲线进行了归一化处理,结果如图8所示,横坐标为模拟物沉降深度H与压盘半径r的比值,纵坐标为压盘接触区域的模拟物平均承载强度。
(1)加载速度影响:在不同的加载速度下,初期载荷峰值均在H/r=0.1~0.2阶段出现。随着侵入速度的增加,初期的载荷峰值增大,但后期载荷的上升速度反而降低。
(2)孔隙率影响:低孔隙率模拟物的载荷在初期存在明显的峰值和降为零的特征,但高孔隙率模拟物不存在峰值;同时,低孔隙率模拟物后期的载荷上升速度明显高于高孔隙率模拟物。
(3)粒径影响:随着粒径尺寸的增大,曲线表现出的整体振荡特征越来越明显,振荡的峰值也越来越大。

图7 各实验工况的加载力-侵入深度曲线Fig.7 Loading force vs.intrusion depth curves in the 7 experiments

图8 实验数据的单一变量对比(速度、孔隙率、粒径和侵入物尺寸)Fig.8 Univariate comparison of the experimental data (i.e.,speed,porosity,particle size and intruder size)
(4)侵入物尺寸影响:初期峰值的出现位置和峰值大小基本相同,但后期随着侵入深度的增加,100 mm压盘的载荷上升速度几乎为50 mm压盘的2倍。
3.4 边界效应
在模拟物的制备过程中,土压力传感器的测量数值会受到制备过程影响;在进入微重力后,模拟物内部应力的突然释放,也会使边界压力发生明显的变化,因此在实验中难以通过土压力传感器准确地获得边界压力的绝对值,但可以依据压力测量值的相对变化,获得不同位置边界效应随侵入深度的变化情况。为此对侵入前的压力传感器数值进行了归零分析,绘制了每个工况各测点的压力变化与侵入深度的关系如图9所示。依据传感器精度为0.15 kPa,在图中用虚线标出,可区分边界效应可忽略和不可忽略的区间。结果表明,工况5和工况6在压盘侵入的初期边界压力就急剧增大,存在明显的边界效应,其余工况在实验初期的边界效应可忽略,但随着侵入深度的增加,在实验的后期颗粒床的边界压力缓慢增大,也产生了边界效应。

图9 各工况土压力传感器数据Fig.9 The data of soil pressure sensors
在所有测点中,随着侵入速度增大,靠近模拟物表面的测点1所感知到的边界压力变化最为明显,工况2,4,5,6中测点1的压力变化与加载力的变化趋势几乎相同。与之不同的是,工况1的测点5的压力变化略微明显,表明侵入物对模拟物的载荷主要向底部传递,而随着侵入速度的增加转而向侧面的测点1传递;工况2的测点1曲线先由正变为了负,表明载荷向测点1的传递发生了中断,但之后由负变为了正,表明随侵入深度的增加,载荷又能够顺利地传递至测点1,而在工况6中载荷在一开始就能传递至测点1。由于土压力传感器尺寸的限制,工况3和7的测量值仅可作为参考,但结果表明边界压力曲线的整体趋势与加载力保持了一致。
4 结束语
4.1 微重力下无黏性星壤的承载特性
实验结果表明,微重力下低速侵入过程中,无黏性星壤的动力学响应显著受到侵入速度、侵入物尺寸、粒径和孔隙率等因素的影响。相同模拟物的承载能力较地面重力条件下降低了一个数量级以上。
星壤模拟物的加载力-侵入深度曲线表明其承载能力近似符合静水压规律,载荷比较显著地体现了与侵入深度成正比的静压项,特别是对于疏松(孔隙率较高)的模拟物,该现象更加显著。同时,载荷的峰值以及整体趋势没有显著体现与侵入速度平方成正比的阻尼项,表明在所关注的速度范围内,阻尼力近似可以忽略。此外,较大的侵入速度可能加剧模拟物的“流化”效应,间接导致承载能力的下降。因此,可认为在微重力下的低速侵入过程中,星壤的整体响应特征比较接近于流体。值得注意的是,密实(孔隙率较低)的模拟物会在侵入过程中呈现结构弛豫现象,载荷会在H/r=0.1~0.2出现初始峰值,且随着侵入速度的增加,初始峰值增大,但后期载荷的上升速度反而降低。
实验中星壤模拟物的响应也明显表现出对粒径尺寸的依赖性,即粒径效应。由于侵入物所接触到的颗粒个数非常有限,颗粒间不连续的接触作用会引起接触力链不断地的被建立与破坏,导致接触力呈现明显的不均匀性和不连续性。Fuglsang等[23]的研究表明粒径效应与侵入尺寸D和土壤平均粒径d的比值密切相关,当D/d小于15时,会有明显的粒径效应,本实验得出了一致的结果。从粒径3 mm(D/d=16.7)到10 mm(D/d=5),加载力曲线从呈现局部振荡转为整体振荡。
实验利用土压力传感器探究了颗粒床在微重力下的边界效应,结果表明,微重力环境下颗粒介质的边界效应不仅与模拟物和侵入物的尺寸比值相关,侵入速度也是重要影响因素之一,更高的侵入速度导致产生了更大的波及范围以及更明显的边界效应。对于本实验,侵入速度在0.02 m/s以下、模拟物的尺寸是侵入物尺寸的6倍以上且侵入深度H/r<0.5时,可忽略边界效应的存在。
4.2 对采样与着陆任务设计验证的启示
采样及着陆装置设计时,应针对不同粒径星壤,合理优化装置尺寸和接触速度。考虑粒径效应,当侵入物与星壤接触部位的尺寸与星壤的颗粒尺寸接近时,物体会更容易侵入星壤中,该情况较适用于采样器设计;反之,当侵入物与星壤接触部位的尺寸比星壤的颗粒尺寸大很多时,星壤则能提供较大的支撑力,该情况适用于着陆机构设计。接触速度较低时,有利于减小星壤的反作用力;较高速的接触,可能使星壤发生“流化”现象,导致星壤的承载能力在峰值过后显著下降。
微重力环境下星壤间粘附力弱,受扰极易飞溅,为采样创造了良好的条件。航天器可以利用小的扰动装置,即可获得大量星壤飞溅,采取有效的收集方式,就可以获得一定量的样品。但星壤的飞溅,也会给航天器上设备的安全带来不利影响,需综合考虑各类防护措施。
采样、着陆装置与星壤接触过程中,航天器会受到复杂的星壤力作用。实验表明,航天器的采样或着陆装置与星壤接触过程中,可能会首先出现峰值力,之后下降再上升;不同的星壤级配和孔隙率,也会带来力曲线趋势的变化。航天器需针对此特性,开展控制策略设计,以确保探测器不反弹,不过度下陷,不会发生姿态失稳。
地面环境下模拟小行星的采样过程,星壤力学响应的真实性与有效性较差。应模拟微重力环境或进行其它等效验证。在进行采样或着陆装置的实验验证时,应模拟微重力、星壤粒径、孔隙率等目标特征,并力求消除边界效应的影响,才能获得较为真实的验证结果。
