面向空间目标相对轨道确定的编队优化方法
2022-12-26李佳兴张斯航
李佳兴,袁 利,2,张 聪,张斯航,孙 栋
(1.北京控制工程研究所,北京 100094;2.空间智能控制技术重点实验室,北京 100094)
0 引 言
以可见光相机为代表的被动式测量装置广泛应用于空间监视和空间碰撞预警等任务[1]。通过对空间目标非分辨点成像数据的处理,可获得其相对航天器的视线测量信息,基于视线测量信息的空间目标相对轨道确定方法成为保证航天器在轨安全运行的重要手段[2]。
单视线测量信息缺少航天器与空间目标的相对距离信息,可观测度差,造成相对轨道确定算法收敛慢甚至不收敛[3];而利用多航天器对空间目标的视线信息可显著提高系统可观测度,进而提高空间目标轨道确定精度。文献[4-5]利用两个航天器的双视线测量信息以及两个航天器之间的距离信息,通过集中式滤波方法确定空间目标相对轨道,并且说明系统可观测度与双视线夹角相关。考虑到采用集中式滤波方法时系统状态估计维数高,高学海等[6]采用分布式滤波方法完成空间目标相对轨道确定,龚柏春等[7]则考虑多个航天器场景,通过多个航天器间的位置约束,采用一致性扩展卡尔曼滤波方法,提高了空间目标相对轨道确定精度。以上研究都需要航天器间基线信息,Li等[8]考虑无法获取基线信息的场景,仅利用两个航天器对空间目标的视线测量信息,确定空间目标轨道,Hippelheuser等[9]则将此方法拓展到多航天器测量场景中,并设计了多视线测量信息选择策略。由于Li等和Hippelheuser等的方法未引入航天器间距离信息,空间目标相对轨道确定误差收敛慢。空间目标轨道确定精度受观测平台和空间目标的几何布局影响,文献[10-11]通过选择两个航天器对空间目标的视线夹角为指标函数,分别采用人工势场法和粒子群优化方法对编队航天器接近空间目标过程中的轨迹进行优化,有效避免了编队内航天器对空间目标测量视线重合的情况。黄静琪等[12]则通过对观测节点的合理布局设计,提高了轨道确定的精度以及收敛速度。
以上研究均对航天器编队进行优化设计,以提高空间目标相对轨道确定精度,但是还存在以下两个问题:首先,现有研究假设编队内航天器的轨道均可设计,并未考虑部分或者全部航天器轨道运动受限的情况,与实际工程存在较大差别;其次,根据指标函数进行编队优化的方法,多选择以燃料消耗和视线夹角为指标函数,以编队内航天器位置为优化变量,其指标函数和优化变量并未明确与航天器编队几何布局之间的关系,存在优化变量冗余和耦合的问题,进而造成优化过程求解复杂。
本文在现有研究的基础上,重点分析主、辅航天器和空间目标三者的几何布局与空间目标定位误差的变化规律,得到减小空间目标定位误差的角度条件。通过建立辅航天器相对轨道要素与该角度条件的关系,在主航天器轨道受限时,设计辅航天器初始相对轨道,结合空间目标初始相对轨道信息,采用遗传算法对辅航天器相对轨道要素取值进行优化,提高空间目标相对轨道确定精度。
本文首先建立基于双视线测量的空间目标相对轨道确定方法,然后研究空间目标定位误差变化规律,之后根据这一规律设计并采用遗传算法优化辅航天器相对轨道,最后采用数值仿真对编队设计和优化方法进行验证、对比和分析。
1 双视线测量相对轨道确定方法
本文建立的双视线测量相对轨道确定方法原理如图1所示,主航天器C1和辅航天器C2采用光学相机分别获取空间目标的视线信息l1和l2,主航天器通过激光雷达测量与辅航天器的基线信息r21。根据上述测量信息并结合相对轨道动力学模型,采用扩展卡尔曼滤波(Extended Kalman filter,EKF)方法,在主航天器C1的轨道坐标系下,完成空间目标相对位置和相对速度的估计。
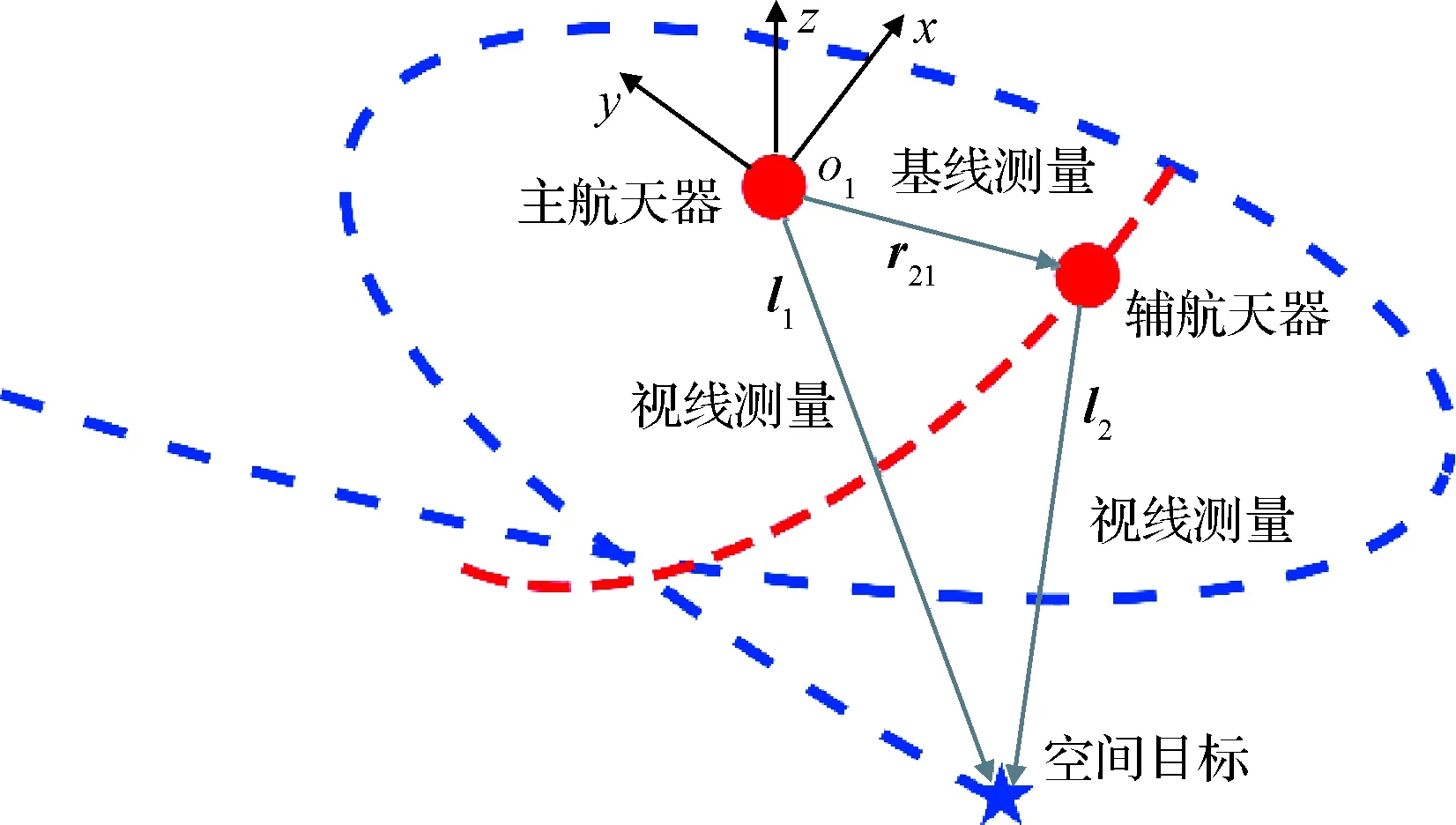
图1 双视线测量相对轨道确定示意图Fig.1 Schematic of relative orbit determination by double line-of-sight measurement

在主航天器轨道坐标系中,采用CW方程描述辅航天器和空间目标的运动[6],系统的状态方程为
(1)

(2)
式中:n是已知的主航天器平均轨道角速度。
视线测量信息采用空间目标在主、辅航天器光学相机像平面坐标l1=[u1,v1]Τ和l2=[u2,v2]Τ表示为
(3)
式中:f1,f2为主、辅航天器搭载光学相机的焦距;[x1,y1,z1]Τ与[x2,y2,z2]Τ分别表示空间目标在主、辅航天器相机坐标系下的坐标,其与系统估计状态之间关系为
(4)

定义系统的测量方程为
(5)
由式(1)和式(5)组成的相对轨道确定系统采用EKF方法进行融合[13]。本文接下来分析空间目标位置确定误差与主、辅航天器和空间目标三者几何布局之间的关系。
2 空间目标位置确定误差分析


图2 主、辅航天器与空间目标几何布局Fig.2 Geometric layout of the main and auxiliary spacecraft and the space target
当主航天器与空间目标连线和基线的夹角α1,辅航天器与空间目标连线和基线的夹角α2和基线长度r21已知时,空间目标位置可表示为
(6)
式(6)说明空间目标位置确定误差受基线测量误差δr21和角度测量误差δα1和δα2影响。考虑到激光雷达测距精度优于米级[14],基线测量误差δr21较小,并且δr21对位置确定误差的影响远小于δα1和δα2的影响,故可忽略基线存在的测量误差[15]。本文中主、辅航天器基线长度r21保持1~3 km,空间目标到基线距离L在20~70 km变化,L和r21之比k在7~70之间变化,此时通过仿真和理论分析可知空间目标沿视线方向的距离不确定度要远大于垂直视线方向的距离不确定度,可采用距离L的确定误差来近似空间目标的位置确定误差。综上所述,当仅考虑角度测量误差δα1和δα2时,有空间目标位置确定误差
(7)
假设角度测量误差δα1和δα2相互独立且服从零均值高斯分布,其标准差均为σα,则有位置确定标准差σL
(8)
式(8)说明当α1+α2趋向0°或180°时,主、辅航天器和空间目标趋向于共线,双视线测量退化为单视线测量,此时单次测量位置确定误差σL趋向无穷。
对于某一确定的L和r21比值k,定义S(α1,α2)为误差放大系数,表示角度测量误差和位置确定误差传递关系,与主、辅航天器和空间目标几何布局相关,其值越小说明由角度测量误差造成的空间目标位置确定误差越小,有
(9)
为求解S(α1,α2)取极小值时的α1和α2之值,考虑式(6)的等式约束,建立约束优化问题
(10)
当α1=α2=α时,由式(6)可得tanα=2k,对式(9)进一步化简有
(11)
式(11)说明,L和r21比值k越大,空间目标位置确定误差越大。图3表示k取不同值时,函数S(α1,α2)以α1,α2为自变量的曲线,可知对于本文中L和r21比值在7~70之间变化的场景,函数S(α1,α2)极小值点均在α1=α2处,并且k值越大其极小值越大。

图3 不同k值下的函数S(α1,α2)曲线Fig.3 Curve of the function S(α1,α2) with different k values
综上所述,为提高空间目标定位精度,一方面要避免主、辅航天器和空间目标共线的情况;另一方面应尽可能使空间目标与主、辅航天器基线中点连线和基线的夹角φ接近90°,并且适当增加主、辅航天器基线长度r21以减小L和r21比值k。
3 辅航天器初始相对轨道设计与优化
前文通过对双视线测量下空间目标定位误差变化的分析,说明在相对轨道确定过程中主、辅航天器和空间目标需满足一定角度条件。另外,考虑到主航天器轨道运动受限,仅可对辅航天器轨道进行设计,同时为节省燃料、满足基线测量的距离约束,辅航天器采用自然绕飞方式与主航天器保持1~3 km距离。本节通过建立辅航天器相对轨道要素与角度条件之间关系,设计满足以上多种约束的辅航天器初始相对轨道,并采用遗传算法对初始相对轨道进行优化。
3.1 辅航天器初始相对轨道设计
采用相对轨道要素(Relative orbital elements,ROE)描述辅航天器和空间目标在主航天器轨道坐标系中的运动[8]。相对轨道要素为[ae,xd,yd,zd,β,θ]六元数组,在主航天器轨道坐标系中,给定时间t,目标位置[x,y,z]满足
(12)
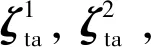
式(12)说明,当xd=0时,目标在主航天器轨道坐标系xy平面的运动为椭圆,椭圆中心为(xd,yd),半长轴为2ae,半短轴为ae,起始相位为β;当xd≠0,目标在主航天器轨道坐标系xy平面的投影比较复杂,可看作是一系列运动椭圆的拼接,椭圆中心(xd,yd)以速率-1.5nxd随时间沿y轴正方向移动;目标在主航天器轨道坐标系z轴的运动是振幅为zd,初始相位为θ的简谐振动,如图4所示。
图4 近圆参考轨道中的相对运动Fig.4 Example of the relative motion in a near-circular reference orbit
根据图2中的几何关系,空间目标与主、辅航天器基线中点连线和基线的夹角φ满足
(13)

(14)

首先,根据空间目标运动起始时刻三轴分量特征,可将式(14)展开并化简为
cos2φ=
(15)
式(15)说明:
1)夹角φ仅与辅航天器相对主航天器的轨道运动相关,与空间目标运动无关,因此在主航天器轨道运动受限时,可通过设计辅航天器初始相对轨道来改变夹角φ;

结合式(12),辅航天器x,z轴分量可表示为
(16)
为保证辅航天器对主航天器形成自然绕飞轨迹,需满足xd=0,此时辅航天器沿主航天器y轴飘移速率为0,根据三角函数公式,式(16)可化简为
sin(2nt+λ1)
(17)
式中:
(18)
式(17)说明:
1)当ae=zd=0时,辅航天器在主航天器轨道坐标系xz平面内投影为零,主、辅航天器和空间目标共线;

3)特别地,当cos[2(β-θ)]=1时,有
sin(2nt+λ1)
(19)
根据三角函数关系有
(20)
同理,当空间目标在主航天器下方时,式(14)可展开为
(21)
辅航天器在yz平面的投影满足
sin(2nt+λ2)
(22)
式中:
(23)
式(22)说明:

2)特别地,当cos[2(β-θ)]=-1时,有
(24)
综合式(17)和式(22)结论,为避免在空间目标接近过程中主、辅航天器与空间目标共线的情况,要求主、辅航天器基线在xz,yz平面投影不为零,辅航天器初始相位应满足不等式cos[2(β-θ)]≠±1。
综上所述,为满足轨道确定过程中的角度条件,辅航天器相对轨道元素需满足ae≠0,zd≠0,cos[2(β-θ)]≠±1;同时为保证主、辅航天器编队保持稳定,辅航天器相对轨道元素应满足xd=0,而ae,zd,yd根据主、辅航天器距离约束取值。进一步可知,不同的初始相位β和θ引起相对轨道确定过程中基线长度r21和夹角φ的不同变化,因此在基线长度满足约束时,可通过设计初始相位来改变基线长度r21和夹角φ随时间的变化规律,使夹角φ接近90°并减小比值k,从而减小空间目标相对轨道确定误差。
3.2 辅航天器初始相对轨道优化
根据上节分析影响角度和距离等约束的辅航天器相对轨道要素,本节将辅航天器相对轨道要素取值求解问题转化为优化问题。考虑到β,θ是影响相对轨道确定误差的主要元素,同时为在满足距离约束时增加主、辅航天器基线长度,选择辅助航天器相对轨道元素中yd,β,θ为优化变量,ae,zd,xd相对轨道要素按设计值给定。
优化问题可表示为
(25)

本文设计的基于遗传算法的辅航天器初始相对轨道求解方法流程为:
1)设定种群大小、终止条件、交叉和变异等超参数;
2)对优化变量yd,β,θ采用实数编码,并根据变量约束进行种群初始化;
3)计算种群内个体的适应度函数值J;
4)依次对个体执行选择、交叉和变异操作;
5)判断迭代过程是否满足终止条件,若不满足,则返回步骤3),若满足则执行步骤6);
6)返回最优个体,解码得到最优解。
4 数值仿真与分析

(26)
式中:r为空间目标相对主航天器的真实相对位置,仿真中可根据高精度轨道积分模型输出的空间目标和主航天器在惯性系中的绝对位置,及主航天器轨道坐标系到惯性坐标系间的转换矩阵计算。
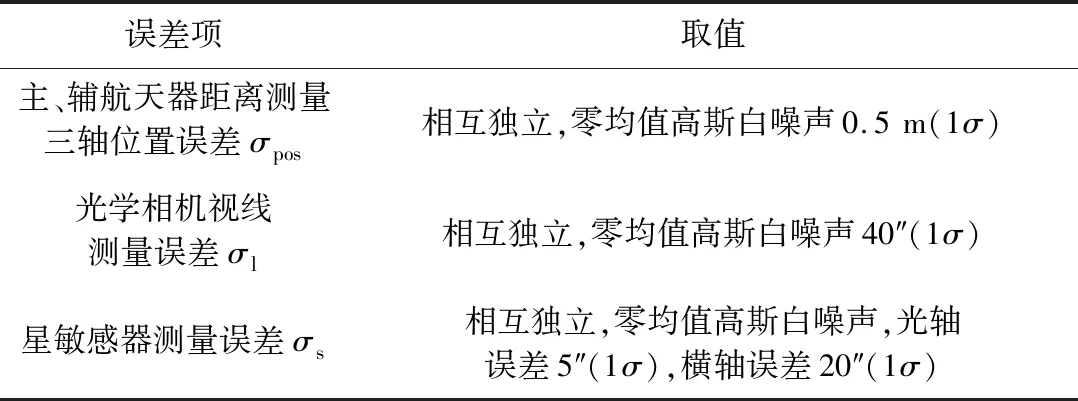
表1 测量信息误差特性Table 1 Measurement error characteristics

表2 滤波算法参数Table 2 Parameters of the filtering algorithm
测量信息误差特性和相对轨道确定滤波算法参数设置分别在表1和表2给出。仿真中主航天器在惯性系中的轨道参数是:半长轴a为42164.16 km,偏心率e为10-4,轨道倾角i为0.001°,升交点赤经R为29.5°,近地点幅角ω为14.4°,平近点角M为59.95°。仿真中空间目标轨道参数,以及场景E1和场景E2下设计的辅航天器C2轨道参数见表3,表3中的参数值与式(12)中六元数组定义一一对应。
表3 初始相对轨道参数Table 3 Initial relative orbital elements
空间目标接近主航天器曲线如图5所示,空间目标起始时刻y轴分量为-120 km,远大于其它两轴分量;当空间目标运动到主航天器正下方时,x轴分量约为-52 km,其余两轴分量约为0 km。
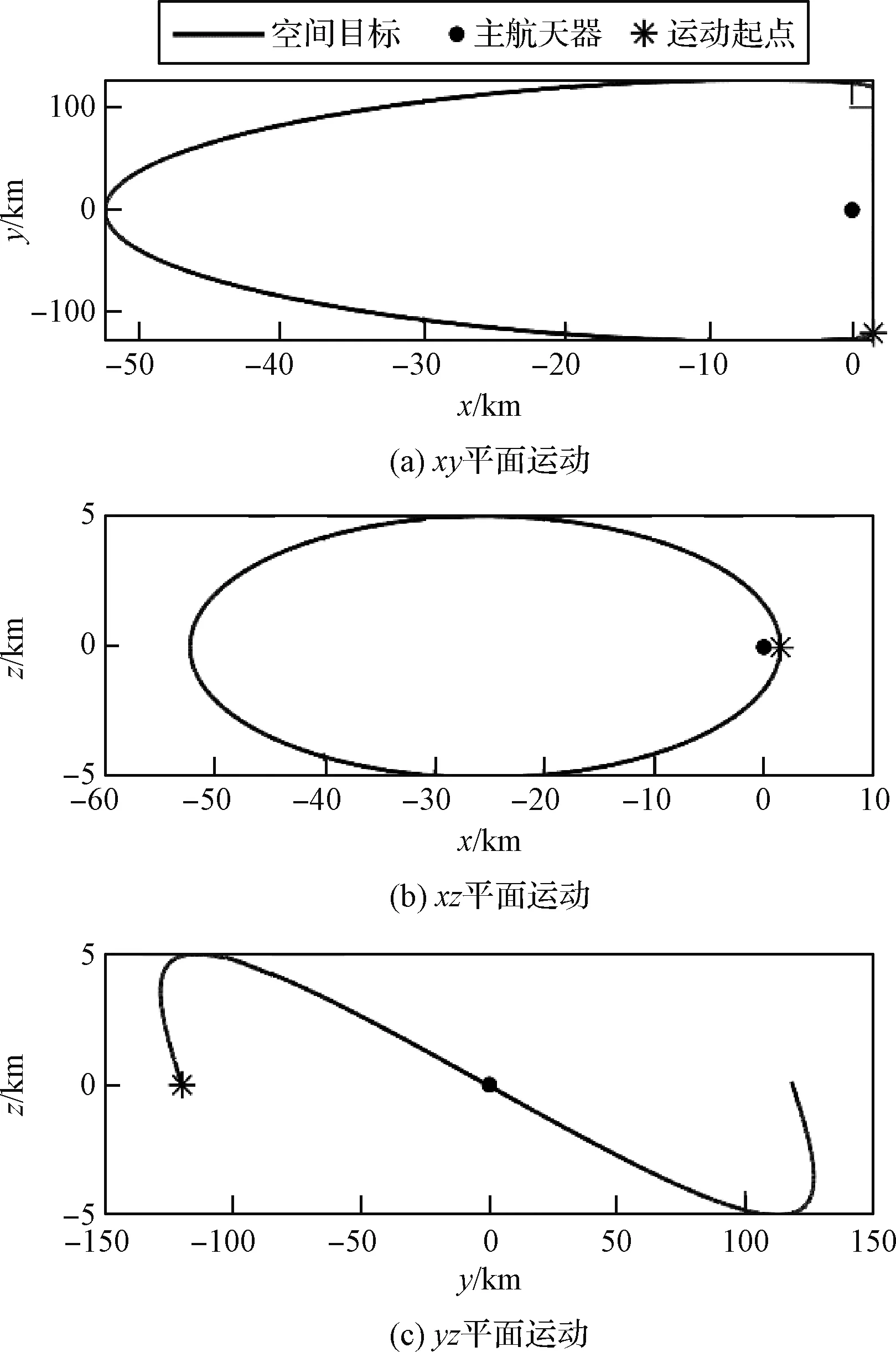
图5 空间目标相对主航天器的轨道运动Fig.5 Orbital motion of the space target relative to the main spacecraft
1) 仿真场景E1 辅航天器在主航天器轨道坐标系xy平面内运动为半长轴、半短轴之比为2∶1的椭圆运动,在xz平面、yz平面投影均为椭圆,辅航天器距主航天器轨道坐标系三轴最远距离与ae,zd,yd设计值相关,如图6所示。
空间目标相对位置估计误差如图7所示,根据第3节结论设计的主、辅航天器编队构型,可以保证对空间目标相对位置估计的收敛性,但在估计过程中仍会出现估计误差增大的现象,如图7中第8小时左右出现的尖峰。此时主、辅航天器和空间目标接近共线,对应图8中空间目标与主、辅航天器基线中点连线和基线夹角φ接近180°。

图6 辅航天器相对主航天器的轨道运动(E1)Fig.6 Orbital motion of the auxiliary spacecraft relative to the main spacecraft (E1)
图7中出现相对位置估计误差增大的现象,一方面是因为辅航天器的轨道设计依据式(17)和式(22)中cos[2(β-θ)]≠±1的结论,仅考虑空间目标在起始时刻和中间时刻三轴分量特征,未考虑空间目标整个接近过程;另一方面,在设计辅航天器初始相对轨道时,式(15)做了适当简化,并且未考虑空间目标运动信息,与实际情况存在偏差。
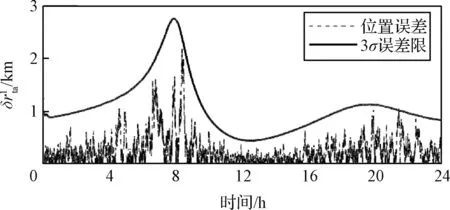
图7 空间目标相对主航天器的位置估计误差(E1)Fig.7 Position estimation error of the space target relative to the main spacecraft (E1)
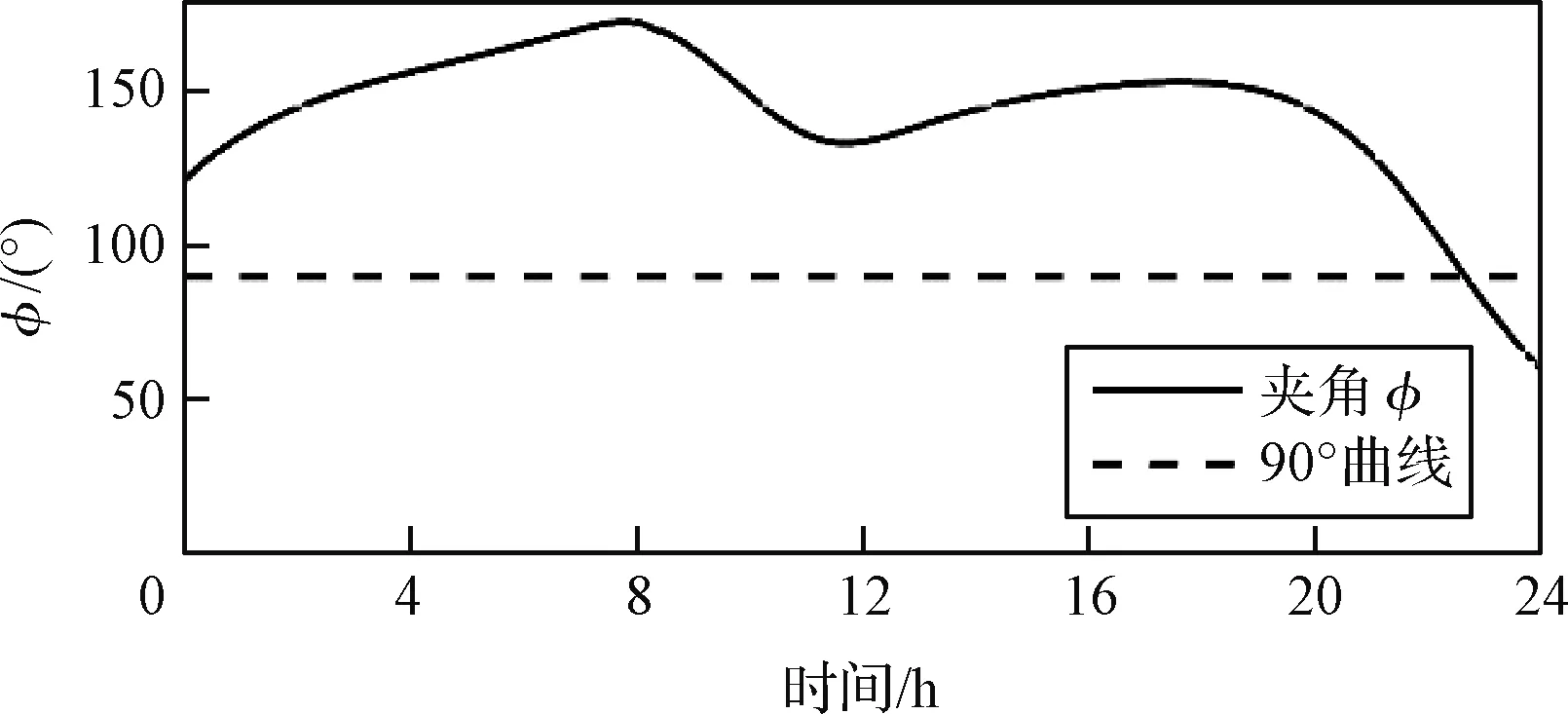
图8 中心夹角变化(E1)Fig.8 Variation of the center angle (E1)
2) 仿真场景E2 对比场景E2和场景E1中辅航天器运动,因为运动起始相位不同,两场景中辅航天器在主航天器轨道坐标平面投影不同,但与各坐标轴最大距离相同,场景2中辅航天器运动如图9所示。

图9 辅航天器相对主航天器的轨道运动(E2)Fig.9 Orbital motion of the auxiliary spacecraft relative to the main spacecraft (E2)
空间目标相对位置估计误差如图10所示,在相对轨道确定过程中仍会出现误差增大的现象,如图10中第18小时左右出现的尖峰,同时图11中夹角φ接近0°,主、辅航天器和空间目标近似共线。仿真场景E2中空间目标位置确定误差增大时刻以及位置确定误差曲线变化规律与仿真场景E1不同,说明设计辅航天器不同的起始相位对位置确定误差的影响不同,与第3节分析结论相符。

图10 空间目标相对主航天器的位置估计误差(E2)Fig.10 Position estimation error of the space target relative to the main spacecraft (E2)

图11 中心夹角变化(E2)Fig.11 Variation of the center angle (E2)
3) 仿真场景E3 场景E3中采用遗传算法优化辅航天器相对轨道参数。优化后的辅航天器部分相对轨道元素为yd=-0.337 km,β=92.07°,θ=97.84°,其余相对轨道元素与前文设计值相同,分别为ae=1.25 km,xd=0 km,zd=1 km。优化后yd不为零,增加了主、辅航天器基线长度;初始相位β和θ改变了空间目标与主、辅航天器基线中点连线和基线夹角φ,以及基线r21随时间的变化规律。
优化后辅航天器在主航天器轨道坐标系中的运动如图12所示。相比于场景E1和场景E2设计的辅航天器初始相对轨道,因为yd不为零,辅航天器与各坐标轴最大距离和场景E1与场景E2存在一定差别,因为起始相位不同造成辅航天器运动在各平面投影与场景E1和场景E2有较大差别。
采用优化辅航天器相对轨道要素后的编队对空间目标相对位置估计误差如图13所示,与图7和图10相比,优化后相对位置估计误差由最大4.1 km减小到低于0.3 km,同时误差波动较图7和图10明显减小。空间目标与主、辅航天器基线中点连线和基线夹角变化平缓,并且夹角φ远离0°和180°,可以满足相对轨道确定过程中主、辅航天器和空间目标不共线的角度条件。
优化后主、辅航天器基线长度变化如图15所示,在辅航天器绕飞过程中,基线在1.2 km至3 km变化。综合图13~图15,在12 h处,相对位置估计误差取最小值,此时夹角约为90°,基线长度也在极大值点附近,与式(10)分析结论相符。

图12 辅航天器相对主航天器的轨道运动(E3)Fig.12 Orbital motion of the auxiliary spacecraft relative to the main spacecraft (E3)
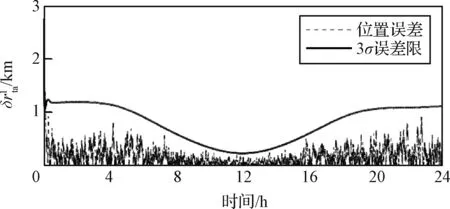
图13 空间目标相对主航天器的位置估计误差(E3)Fig.13 Position estimation error of the space target relative to the main spacecraft (E3)

图14 中心夹角变化(E3)Fig.14 Variation of the center angle (E3)

图15 主、辅航天器距离变化(E3)Fig.15 Distance variation between the main and auxiliary spacecraft (E3)
5 结 论
本文为提高双视线测量下空间目标相对轨道确定精度,分析了空间目标定位误差与辅航天器相对轨道要素间的关系,设计并采用遗传算法优化了辅航天器相对轨道要素。理论分析和数学仿真结果表明:空间目标和主、辅航天器基线中点的连线与基线夹角趋向90°,空间目标距离和主、辅航天器基线长度比值越小,目标定位精度越高;在主、辅航天器基线长度满足约束时,相对轨道确定误差受辅航天器相对轨道要素中的起始相位影响;采用遗传算法优化辅航天器的起始相位后,主、辅航天器编队对空间目标相对位置确定误差由最大4.1 km减小到低于0.3 km且不超过1.2 km。本文研究要求空间目标不存在轨道机动,因此针对空间目标存在轨道机动的情况,如何设计与优化航天器编队以提高相对轨道确定精度是下一步要研究的内容。
