一种高速无人机下行链路信道估计方法
2022-12-25张延洞郭立民禹永植陈斌杰
张延洞,郭立民,禹永植,陈斌杰
(1.哈尔滨工程大学,黑龙江 哈尔滨 150001;2.北京遥感设备研究所,北京 100854)
0 引 言
在高速无人机下行数据链路中,地空无线信道是复杂和不可预测的,电波除直射外还有反射、散射以及绕射等,路径的长短不同,导致到达时间不同,进而引起多径效应,此外无人机的高速移动又会引起严重的多普勒效应。这将导致信道响应出现频率及时间选择性衰落[1]。正交频分复用技术(OFDM)是一种具有灵活带宽、抗衰落及抗码间干扰能力强等优点的通信技术[2],因此非常适合高速无人机下行数据链路。OFDM信号在经过地空无线信道后,会出现失真的现象,一般为幅度和相位的变化,为了得到发端的数据,就必须要对信道特性进行估计并对信道产生的影响进行补偿,因此信道估计受到了广泛的关注[3]。
信道估计算法大致可分为3类:盲信道估计、半盲信道估计以及非盲信道估计[4]。其中,文献[5]对盲信道估计进行了整体介绍,该类算法无需在发端发送已知信息,不占用带宽,但缺点是运算量较大,运算时间长,不利于在实际工程中实现。而基于已知导频处进行信道估计的几种方法中,文献[6]中的最小二乘(LS)估计的主要特点是简单、复杂度低,易于设计和实现,但其缺点在于未考虑噪声的影响,低信噪比下性能较差。相比于LS算法,文献[7]中的最小均方误差(MMSE)算法引入了信道的特性和噪声的影响,提升了性能,缺点是算法复杂且实际应用中噪声的统计特性无法获得,实现起来较为困难。文献[8]线性最小均方误差(LMMSE)相较于MMSE,降低了计算的复杂度,但仍然高于LS算法。
本文首先对无人机地空信道的特点进行了介绍,并根据特点构建了地空信道模型,紧接着构建了基于OFDM的下行数据传输链路。针对信道估计技术,当前许多算法复杂度过高,不易工程实现,本文通过对LS信道估计算法和卡尔曼算法进行研究,立足实际,提出一种联合算法来提高格状导频下的信道估计性能。该方法有效结合了LS估计算法与卡尔曼估计算法的优点,通过结合卡尔曼的方法提升了LS估计算法在格状导频下的估计准确性;相较于只能在梳状导频下进行的卡尔曼估计算法,能够大幅降低导频使用数量,从而提高带宽利用率,具有一定的实际应用价值。
1 系统模型
1.1 地空信道模型
在地面站与空中的无人机进行无线通信时,信道模型主要有2个特点:一是多径效应严重;二是多普勒频移严重[9]。图1给出了无人机地空通信的示意图。
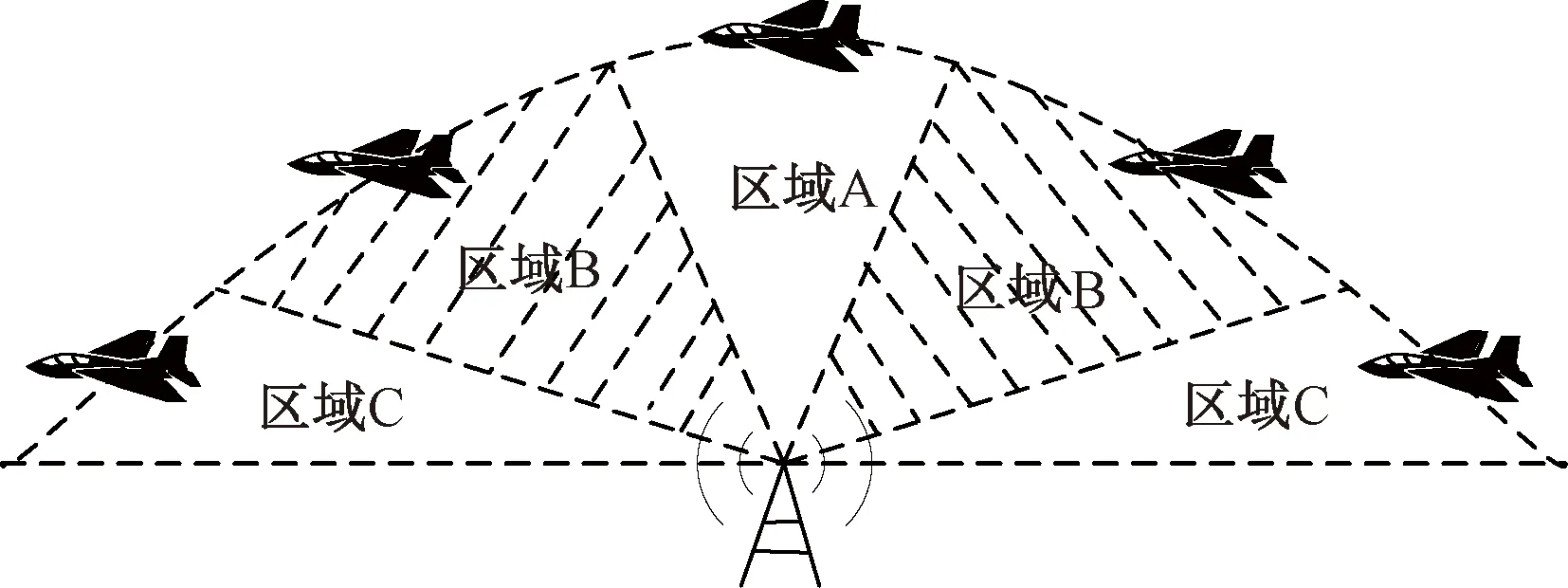
图1 地空通信示意图
从图1可以看到,无人机与地面站之间的信道特性与仰角大小、相对位置关系有着密切的关系。根据相对位置和仰角的不同,可以大致分为3种区域。
其中当空中飞行器终端位于地面站的正上方位置时,即图1中区域A,为高仰角区域,此时飞行器终端径向速度较小,多普勒频移小,且遮挡较少,可以近似视为高斯信道。随着无人机与地面站之间距离的增大,仰角逐渐变小,各种地面障碍物的影响越来越大,造成严重的多径效应,如图1区域B所示。当进入到图1区域C中时,无人机与地面站之间的直射分量几乎被各种障碍物遮挡,传输可能会导致中断。因此本文重点研究图1区域B中的地空无线信道情况。
多径效应要考虑的路径主要为无人机与地面站之间的直射路径、高山等障碍物引起的反射路径以及散射路径,如图2所示。

图2 区域B的地空信道路径图
因此,可以用三径模型来描述地空通信的实际信道,其中直射路径为主径,服从莱斯分布,反射路径与散射路径等形成的多径服从瑞利分布。
除了多径效应外,无人机飞行速度较高,因此还会带来多普勒效应,如图3所示。

图3 多普勒频移示意图
多普勒频移与无人机的运动速度以及载波波长有关:
(1)
式中:fc为系统载波中心频率;c为光速。
无人机的最大飞行速度一般不超过300 m/s,载波中心频率为2 GHz,当θ=0时,cosθ有最大值,此时多普勒频移最大:
(2)
综上所述,本文地空信道的主要参数如表1所示。

表1 地空信道参数设置
按照表1的参数设置,对地空信道进行建模,仿真结果如图4所示。

图4 地空信道仿真图
图4中实线表示主径,其功率要大于另外两径,服从莱斯衰落,虚线和点划线分别表示反射和散射子径,为瑞利衰落。
1.2 OFDM传输模型
图1为OFDM通信系统的结构框图,主要包括映射、串并转换、导频插入、反快速傅里叶变换(IFFT)运算、插入CP等模块。其中IFFT为核心模块,也是OFDM调制过程,通过IFFT把比特数据调制到不同的正交子载波上,并直接将一个周期内的叠加结果计算出来。经IFFT变换得到的时域信号x(n)可以表示为:
(3)
式中:X(k)表示OFDM的频域信号;N为子载波个数。
调制后的信号需插入循环前缀充当保护间隔,之后信号经并串转换,转回串行数据流,最后进行发射。

图5 OFDM系统框图
接收端的结构与发送端相反,首先去除循环前缀,得到的信号为:
y(n)=x(n)*h(n)+w(n),n=0,1,…,N-1
(4)
式中:*表示卷积;h(n)为信道响应;w(n)为噪声。
对y(n)做快速傅里叶变换(FFT)变换,得到:
Y(k) =X(k)H(k)+W(k)
(5)
经信道估计后,进行解映射,得到所传输的信息。
导频插入的结构有3种:块状、梳状和格状。其中,块状导频时域离散,频域连续,适合多径信道;梳状导频频域离散,时域连续,适合多普勒信道;而格状导频时频域皆为离散,导频使用数量下降,本文中多普勒和多径都较为严重,因此需要兼顾时频2个方向,采用格状导频结构。
2 信道估计
2.1 LS信道估计算法
接收端信号可以表示为:
Y=XH+W
(6)
式中:X表示已知导频序列;Y表示导频位置接收信号;H表示导频位置的信道频率响应;W为信道中的噪声。
LS的估计准则是误差的平方和最小,则代价函数J为:

YHY-YHHY-HHXHY+HHXH
(7)
对式(7)求偏导,得到:
(8)
令式(8)等于0,即代价函数最低,求得的信道估计结果为;
(9)
2.2 卡尔曼估计算法
卡尔曼( Kalman )最优估计技术是由卡尔曼与布西合作发展形成的一套最优估计理论,是一种基于时域最优估计的方法[10],它通过采用状态空间的最优估计方法对信号进行描述,并将信号过程视作白噪声下的线性系统输出,从观测量中估计出所需要的信号。
假设用以下状态空间模型来构造:
H(k)=ΦH(k-1)+W(k)
(10)
Y(k)=H(k)X(k)+V(k)
(11)
式中:k为离散时间,系统在时刻k的状态为H(k);Y(k)为相应时刻的观测值;W(k)为引入的白噪声;V(k)为观测带来的噪声[11-12]。
式(10)为状态方程,式(11)为观测方程,Φ为状态转移矩阵。递推Kalman估计如下:
状态一步预测:

(12)
状态更新:

(13)
滤波增益矩阵:
K(k)=P(k|k-1)XH[XP(k|k-1)XH+R]-1
(14)
一次预测协方差阵:
P(k|k-1)=ΦP(k-1|k-1)ΦT+Q
(15)
协方差阵更新:
P(k|k)=[In-K(k)X]P(k|k-1)
(16)
(17)
W(k)和V(k)是均值为零、方差阵各为Q和R的不相关白噪声。初始状态X(0)不相关于W(k)和V(k)。
卡尔曼算法采用递推的形式,无需存储所有时刻历史数据,只需根据前一时刻的估计值和当前时刻的测量值,即可准确计算得出新的估计值[13]。
2.3 LS-KF联合估计算法
LS算法的缺点在于忽略了噪声的影响,噪声大时,其性能较差;而卡尔曼估计方法需要保证导频在时间域是连续的,所需导频数量较多,且估计误差会随着时间不断累积,导致性能下降。本文结合二者优势,且对劣势互相弥补,提出了LS-KF联合估计算法,首先是插入格状导频,可以兼顾对时域、频域2个方向的信道估计,并减少导频使用量;然后利用LS估计方法得到离散导频位置处的粗信道响应估计值;紧接着进行时域插值,将时域离散转变为时域连续;进而采用卡尔曼算法对其进行二次估计,进一步优化估计性能;最后利用优化后的时域方向估计值进行频域方向插值,完成整个信道估计。
该方法的具体步骤是:
(1) 对导频位置的信号进行提取,得到YP。


(5) 利用步骤(4)中优化后的时域方向的估计值进行频域方向的插值拟合。
3 仿真分析
在仿真实验中,通过Matlab对LS-KF联合算法进行的仿真,信道2.1中建立的模型,并加入不同的多普勒频移,具体参数设置如表2所示。为了验证联合算法的有效性,在仿真实验中,通过设置不同的导频插入方式和不同的多普勒频移,与LS算法、卡尔曼估计算法进行了对比。

表2 仿真参数设置
图6为在多普勒频移Δf=500 Hz情况下,4种算法在不同信噪比条件下的误码率变化趋势。从图6可以发现,LS算法因其在计算过程中忽略了噪声因素的影响,总体性能较差,尤其是在格状导频下,性能最差。梳状导频下LS估计性能有所提升,但代价是增加了导频使用数量。卡尔曼估计由于其递推算法会导致误差累积,在信噪比较低时相比LS算法有优势,但在信噪比较高时,优势不大。
从图6中可以看出,在Δf=500 Hz、系统误码率为10-4时,本文提出的LS-KF联合估计算法在格状导频下与LS算法相比,有2 dB左右的性能提升;与梳状导频下的LS算法相比,在导频使用数量下降了60%的同时,有1 dB左右的性能提升。与卡尔曼估计算法相比,性能较为接近,但导频使用数量下降60%。

图6 Δf=500 Hz时误码率性能比较
在多普勒频移增大为Δf=2 kHz后,如图7所示,4种算法的性能均有所下降。在系统误码率为10-3时,本文算法在格状导频下与LS算法相比有3 dB左右的性能提升;与梳状导频下的LS算法相比,在导频使用数量下降了60%的同时,有2 dB左右的性能提升;与卡尔曼估计算法相比,性能提升1 dB左右,但导频使用数量下降了60%。与Δf=500 Hz时的性能提升相比,本文算法在大多普勒频移的条件下,性能提升更大。
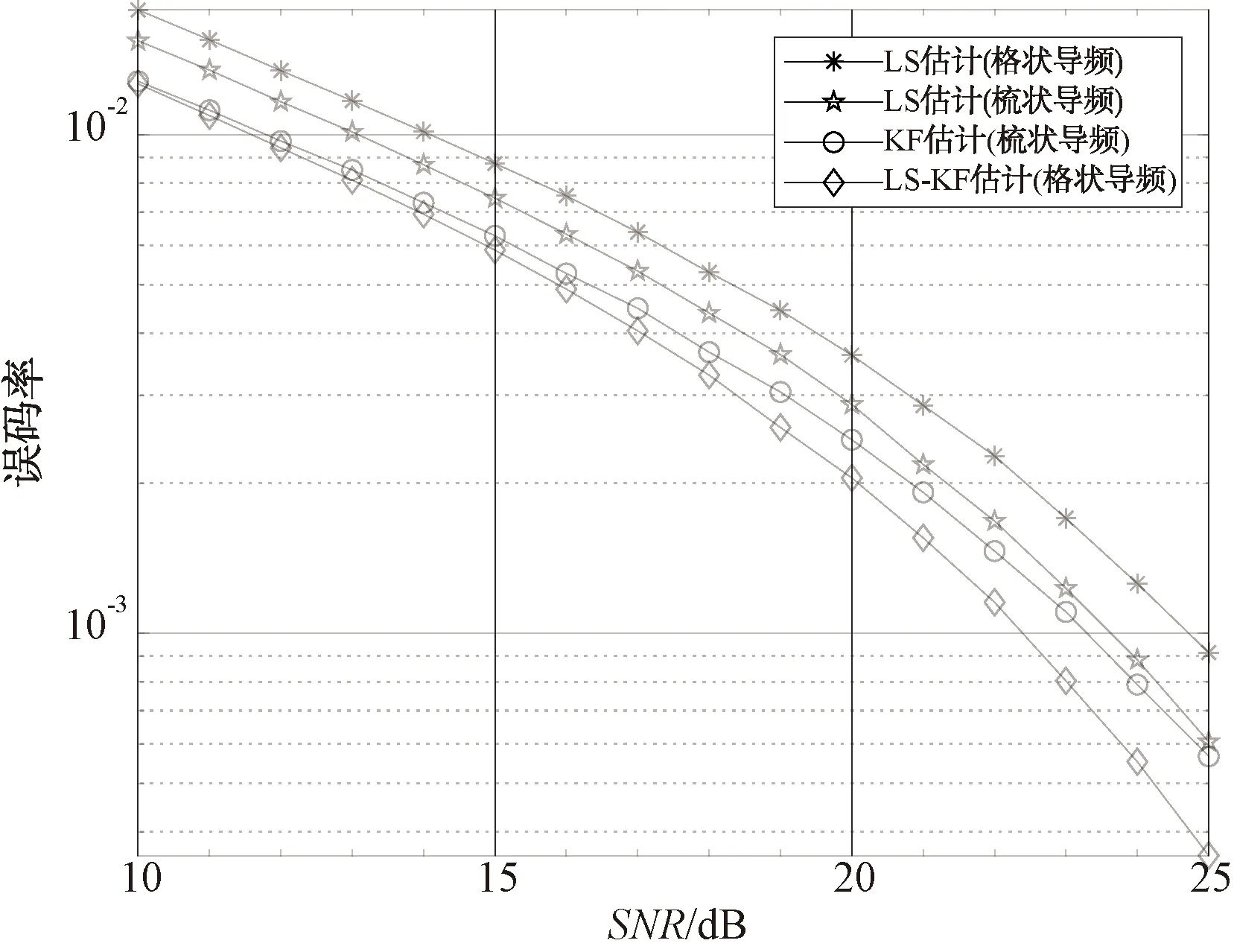
图7 Δf=2 kHz时误码率性能比较
图8为Δf=500 Hz时,4种算法在不同信噪比下估计的均方误差仿真曲线图。在相同信噪比下,梳状导频下的LS算法比格状导频下的LS算法估计精度有2倍左右的提升;本文提出的算法相比梳状导频下的LS算法估计精度又有4倍左右的提升。

图8 4种算法均方误差性能比较
4 结束语
为了解决高速无人机下行数据传输中,地空信道多径效应以及多普勒效应严重导致系统性能下降的问题,本文首先建立了高速无人机地空信道的模型,提出了一种格状导频下的LS-KF联合估计算法,并与现有的传统算法进行了仿真对比,结果表明:该方法解决了格状导频因时域离散而无法进行卡尔曼估计的问题,并相较于时域连续的梳状导频下的卡尔曼估计算法,性能提升约1 dB左右,但导频使用数量下降60%。相较于传统LS算法,导频使用数量相同,性能有2~3 dB的提升。
