基于相控阵雷达的多波束低角跟踪方法
2022-12-25王晓楠
王晓楠
(中国船舶集团有限公司第八研究院,江苏 扬州 225101)
0 引 言
对低空/超低空目标进行跟踪测量时,雷达波束照射到海面上,此时雷达接收到的回波信号是目标的回波与海面反射信号之和,这将造成雷达测量出的回波相位中心不能指向目标,而是随目标的距离和高度变化起伏,从而形成了多路径误差,如果不采取一定措施,雷达将无法稳定开展目标跟踪,甚至会导致目标丢失。多路径效应与雷达架高、目标高度、目标距离、雷达工作频率、海面反射系数、雷达电磁波极化等因素均有关系。一直以来,对低空目标的探测与跟踪性能都是跟踪雷达的核心指标,是影响雷达反导防空性能的主要瓶颈[1-2]。
与常规体制雷达比较,相控阵雷达有着波束控制灵活、反应迅速、能同时进行多目标跟踪测量等优势。在低空目标探测与跟踪方面,根据多路径误差产生机理,相控阵雷达采用同时多波束、多频率模式进行低角跟踪,理论上能够抑制多路径效应,提高雷达低角跟踪精度。
1 多径模型及测角误差[3-4]
1.1 多径模型
采用平面多径反射模型来分析多路径对雷达目标测量的影响,如图1所示,直射返回的路径为Rd,直射返回路径的仰角为θd,镜面反射的路径为R1、R2,镜面反射路径的仰角为θr,入射余角为ψ,雷达天线架高为hr,目标的高度为ht。

图1 多路径条件下目标测量模型图
由图1可得出,直射返回路径与镜面反射路径两者的波程之差δ是:
(1)
1.2 测角误差
采用最常用的单脉冲测角模型对雷达角度测量误差进行分析。在存在多路径的情况下,直射返回路径与镜面反射路径的和路、差路合成矢量的关系如图2所示,s∑d为直射返回的和路信号,sΔd为直射返回的差路信号,s∑i为直射返回的和路信号,sΔi为直射返回的差路信号,s∑为2种路径矢量合成后的和路信号,sΔ为2种路径矢量合成后的差路信号。
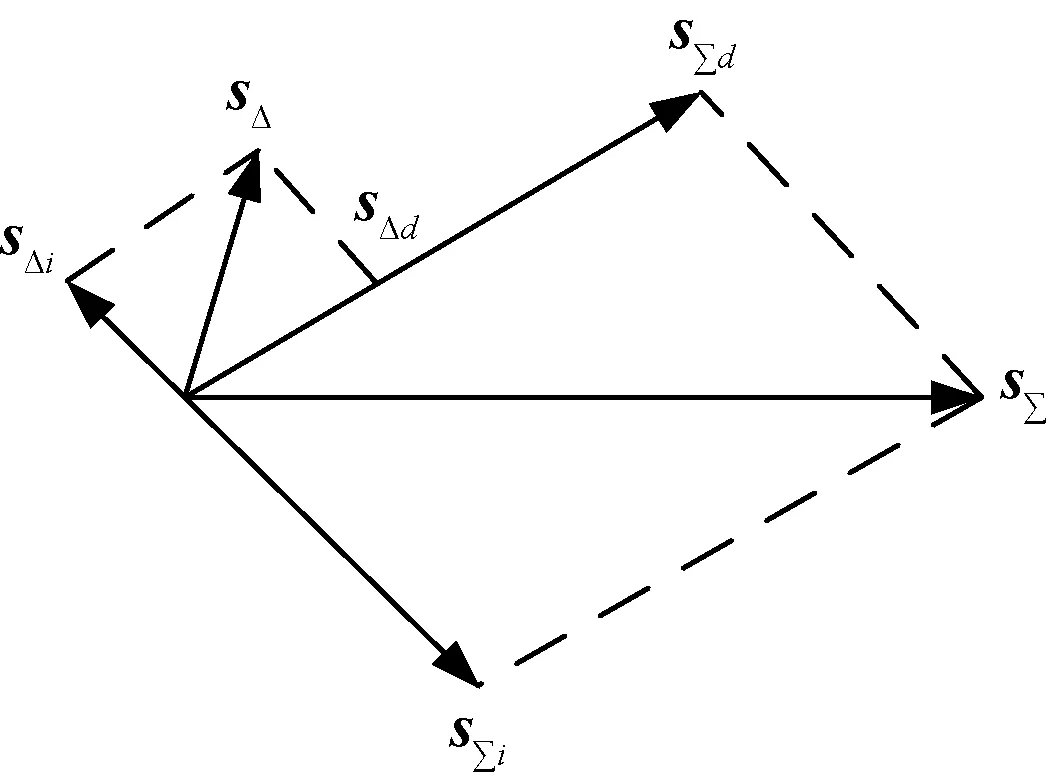
图2 多路径情况下矢量合成示意图
利用和信号s∑完成归一化处理,差路信号与和路信号的单脉冲幅度比为:
(2)
式中:VΔ是差路的接收电压;V∑是和路的接收电压;ρ为复反射系数,ρ=|ρ|ejφ,φ是直射返回路径与镜面反射路径两者的相位差,结果可由公式(1)波程差δ得出:
(3)
多路径条件下的角度测量误差Δθ可由目标仰角θd、复反射系数ρ、相位差φ用公式(4)表示:
(4)
2 常用低角跟踪技术[5-8]
目前常用低角跟踪技术主要包括波束锐化、捷变频、偏轴跟踪等技术,这些低角跟踪技术各有优缺点,简单介绍如下。
2.1 波束锐化
通过加大雷达天线物理尺寸、提高发射频率等措施可以实现雷达的波束锐化。雷达波束锐化,即雷达天线的波束变窄,可以有效减少雷达波束照射到海面/地面的程度,降低反射路径回波对目标跟踪造成的影响。由于雷达目标捕获、平台、环境使用和加工成本等诸多因素限制,波束锐化技术在工程中的应用受到较大限制。
2.2 捷变频
在多路径条件下,雷达接收到回波信号的相位随着距离的不同而变化,是一个周期性的变化过程。由于目标的频率特性差异,不同频率的雷达测角误差也不同,利用捷变频技术可以降低直射返回路径与镜面反射路径的相关性,有效提高低角跟踪精度,达到抑制多路径效应的效果。要完全实现直射返回路径与镜面反射路径去相关,对捷变频带宽要求较高,通常要求带宽在8 GHz以上。
2.3 偏轴跟踪
偏轴跟踪是雷达常用的低角跟踪技术之一,在目标跟踪测量过程中,雷达波束指向低于0.8倍雷达波束宽度时,仰角将保持该角度不变,不再进行跟踪闭环,从而使雷达波束在多路径副瓣区,提高了雷达低角跟踪能力。通常该方法适用于目标仰角在0.3~0.8倍雷达波束宽度位置。当目标仰角进一步降低,偏轴跟踪技术不再适用。
3 基于相控阵雷达的多波束低角跟踪方法
多路径效应与雷达架高、目标高度、目标距离、雷达工作频率、海面反射系数、雷达电磁波极化等因素均有关系。相控阵雷达波束位置、发射频率等均可以灵活控制,利用相控阵雷达同时发送位置不同、频率不同的多个波束,利用频率特性、位置差异对多路径状态下目标角度测量的影响,综合处理后可以提高雷达低角跟踪性能。
目标频率响应不同可以实现直射返回的回波与镜面反射回波的去相关,从而降低多路径带来的测角偏差,公式(3)可变换为:
(5)
测量目标的波束位置差异同样可以实现直射返回的回波与镜面反射回波的去相关,从而降低多路径带来的测角偏差,公式(3)可变换为:
(6)
通过公式(5)可以得出,单独通过雷达捷变频达到直射返回的回波与镜面反射回波去相关,捷变频带宽要达到8 GHz以上,受宽带零点漂移、组件成本等诸多因素限制,工程应用较困难。通过公式(6)可以得出,单独通过雷达高度差异达到直射返回的回波与镜面反射回波去相关,雷达高度差要达到10 m以上,难以通过1部雷达来实现。
基于相控阵雷达的多波束低角跟踪方法可以同时利用频率、雷达高度变化,利用有限的资源实现回波最大化去相关处理,有效抑制多路径带来的影响,达到较好的雷达低角跟踪性能。
4 仿真分析
仿真条件设定如下:海情设定为3级,目标高度为5 m、10 m,相控阵雷达架设高度为15 m,雷达工作频率为12~14 GHz,可捷变频工作,仰角最小波束宽度2°。
首先利用全阵面形成的单一波束对目标的测量进行仿真,目标高度为5 m时仿真结果如图3所示,误差统计信息如图4所示,目标高度为10 m时仿真结果如图5所示,误差统计信息如图6所示。

图3 相控阵雷达单波束仰角测量误差仿真结果(目标高度5 m)

图4 相控阵雷达单波束仰角测量误差数据统计结果(目标高度5 m)

图5 相控阵雷达单波束仰角测量误差仿真结果(目标高度10 m)

图6 相控阵雷达单波束仰角测量误差数据统计结果(目标高度10 m)
基于相控阵雷达的多波束低角跟踪方法,仰角上形成高度14.5 m、15 m、15.5 m 3个波束,其中高度15 m波束宽度为2°,捷变频范围12~14 GHz;高度14.5 m波束宽度为3°,捷变频范围12~14 GHz;高度15.5 m波束宽度为3°,捷变频范围12~14 GHz。3个波束同时对目标进行低角跟踪测量,目标高度5 m时仿真结果如图7所示,误差统计信息如图8所示,目标高度10 m时仿真结果如图9所示,误差统计信息如图10所示。

图7 相控阵雷达多波束仰角测量误差仿真结果(目标高度5 m)

图8 相控阵雷达多波束仰角测量误差数据统计结果(目标高度5 m)

图9 相控阵雷达多波束仰角测量误差仿真结果(目标高度10 m)
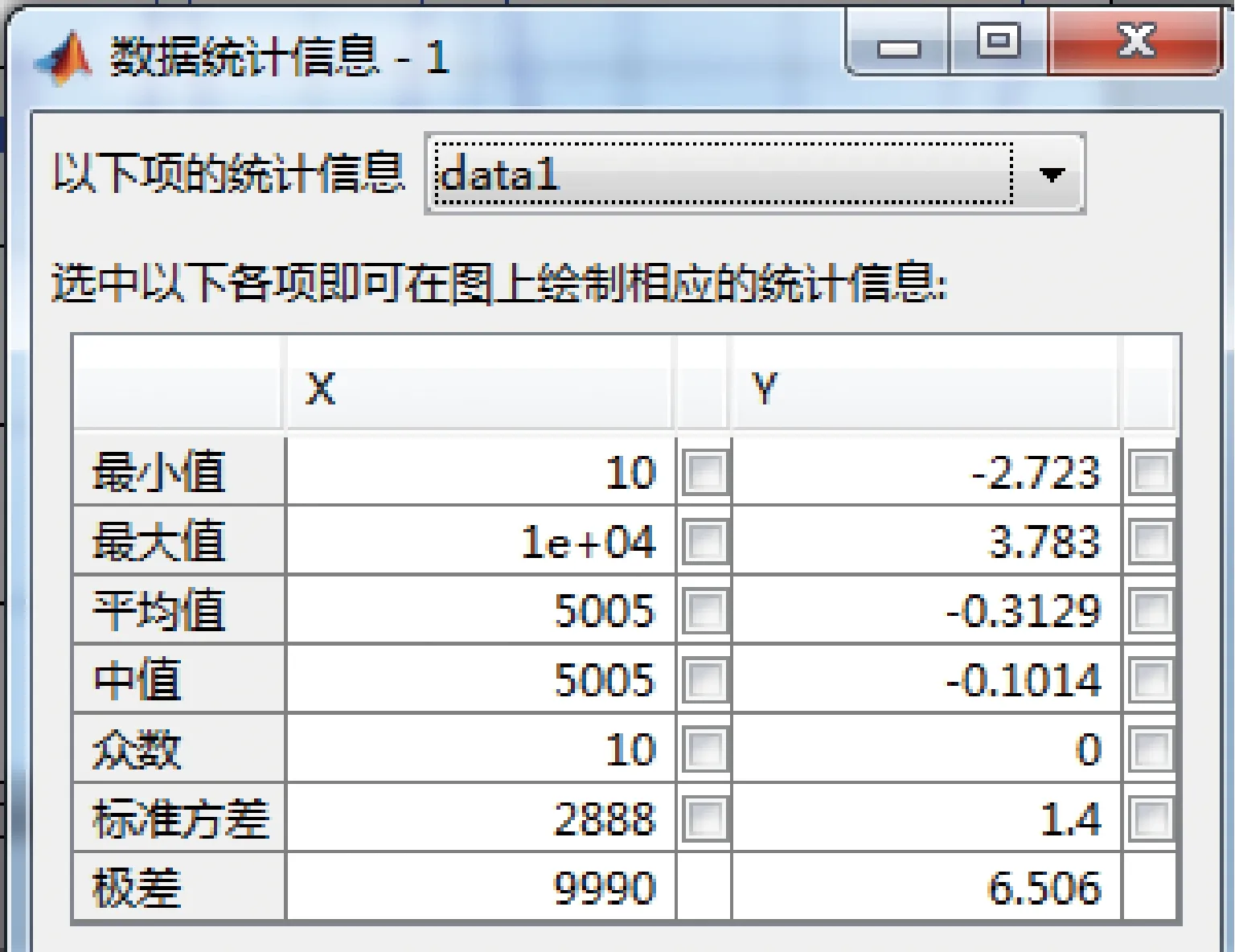
图10 相控阵雷达多波束仰角测量误差数据统计结果(目标高度10 m)
对比图3~图9仿真结果可以得出,采用基于相控阵雷达的多波束低角跟踪方法后,仰角测量误差减小,目标高度5 m时标准方差由1.947 mrad降低为1.205 mrad,目标高度10 m时标准方差由1.722 mrad降低为1.4 mrad,说明基于相控阵雷达的多波束低角跟踪方法能够有效抑制多路径效应带来的影响,提高雷达低角跟踪精度。
5 结束语
为提高相控阵雷达低角跟踪能力,本文基于雷达工作频率与波束位置对目标回波相位造成的影响,提出一种相控阵雷达的多波束低角跟踪方法,通过仿真对比分析了单波束与多波束低角跟踪的差异,证明了基于相控阵雷达的多波束低角跟踪方法能够有效提高雷达低角跟踪性能,具备良好的应用价值。
