手持式显微外科手术机器人设计与仿真研究
2022-12-24张洪鑫徐振邦刘宏伟
张洪鑫,于 阳,徐振邦,刘宏伟
(1.中科院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
1 引言
显微外科手术是一种在显微镜下进行操作的外科手术,外科医生需要在相对受限的区域内进行手术操作,不自主的手颤作为一种无法避免的生理性颤动,严重影响了手术操作的精度[1]。机器人辅助手术技术具有灵活性、高精度以及可重复性的特点,可以为外科医生在手术过程中面临的主要难题提供有效的解决方案[2,3]。
手术机器人按操作方式可以大致分为4类[4]:遥操作式机器人,协作式机器人,手持式机器人以及微型机器人。相比于其它3种手术机器人,手持式机器人设置时间短、占据空间小,同时保留了传统的医生与病人之间的交互感,能够大大缩短外科医生的学习曲线。
为了在有效的空间内增加手术的灵活性并提高手术的精度,已经有了许多手持式机器人的设计出现。美国卡耐基梅隆大学的Riviere等[5]研发了一种主动式手持机器人Micron的第一代原型,该机器人设计包括一个基于压电堆驱动器的3自由度机械手和一个6自由度惯性传感模块,可以用于主动抵消外科医生手部的颤动,但该机器人为了提供足够大的运动范围,在执行器末端布置了7个压电堆,对于手持操作来说是相当重的; Latt等[6]开发了一种名为“ITrem”的3自由度手持式机器人,该机器人是基于挠曲结构设计的,但存在零件制造精度不准确的问题,而导致工作空间比预期设计的小;卡耐基梅隆大学的MacLachlan等[7,8]进一步研发了新一代Micron,该机器人的结构采用在一个大基座上布置压电生物致动器的方式,以增加运动范围,具有3个自由度,可以产生几个毫米的横向运动,但该机器人末端尺寸过大,使得手术的可视化程度受限;韩国科学技术院的Chang等[9,10]研发了一种基于线性Delta操纵器的手持式机器人,该机器人采用了音圈电机以满足运动范围的要求,但由于音圈电机外形过大,同样导致了可视化的程度不足的问题;天津大学的Zhang T等[11]基于挠曲结构设计了一款具有3自由度的手持机器人,该机器人集成了3自由度并联操纵器和高性能惯性测量单元,挠曲结构部分需要随时更换。
综上所述,研究学者们一直在为设计一款最适合应用于显微外科手术的手持式机器人而做努力,但目前手持式机器人为满足运动范围的要求,往往将机器人外形尺寸设计的过大,这将影响外科医生的操作。而小的外形尺寸又常以牺牲工作空间为代价,且大多数已开发的手持式机器人没有考虑远运动中心点设置的需要。为此,本文基于Gough-Stewart构型[12]设计了一种结构紧凑并兼具更大工作空间的手持式机器人,同时基于运动学方法设置了远运动中心点,以满足显微外科手术微创性的需要。
2 结构设计
所提出手持式机器人结构主要包括上平台,手持基座,6组完全相同的驱动单元,镍钛合金丝和1个预紧弹簧五部分,如图1所示。设计过程以整体结构尺寸适合于人手抓握为主要原则,下面分别对这五部分结构进行简单介绍。

图1 手持式机器人整体结构
2.1 上平台
上平台经改造后连接适配器,可用于适配各种不同类型的手术器械,为实现轻量化,采用立体光刻技术(SLA)加工完成,材料为光敏树脂,模型如图2所示。

图2 上平台结构
2.2 手持基座
手持基座同样应轻量化设计要求,加工方式和材料与上平台相同,中间空出的部分用于电机线的伸出,并为后期嵌入的集成电路板留出备用空间,模型如图3所示。
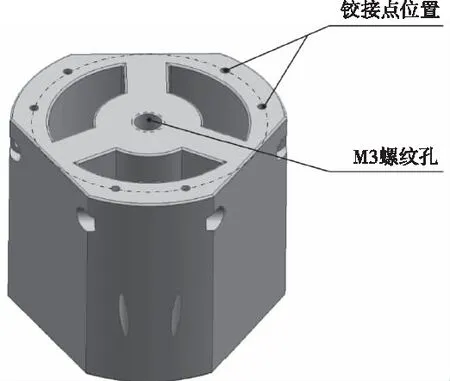
图3 手持基座结构
2.3 驱动单元
驱动单元整体结构如图4所示,选用了一种美国的SQUIGGLE®压电线性微型电机。尺寸为2.8mm×2.8mm×6mm,行程为6mm,能够承受最大推力为0.3N,分辨率为0.5μm。该微型电机的尺寸便于进行结构紧凑型设计,同时可以提供足够大的驱动力,为手持式机器人的功能实现提供了基础。
微型电机通过电机上盖压紧的方式固定在自制的电机架上,以便于拆卸,电机螺纹杆的一端安装了一个轴承组件,该组件由连接器、微型轴承和轴承座组成,另一端安装了一个限位底挡,底挡材料为天然橡胶。其中,轴承组件用于解耦直线运动和旋转运动,以获得纯粹的直线运动,轴承座和底挡分别作为电机的上下止挡,防止螺纹杆与微型电机脱离。

图4 驱动单元整体结构
2.4 镍钛合金丝
镍钛合金丝是一种形状记忆合金,具有很好的可塑性和超弹性,并且在具有较好的轴向不可压缩性[13]。选用镍钛合金丝代替传统的铰链,能够在提供两自由度弯曲运动以及保证一定刚度的基础上,大大简化了手持式机器人整体的结构。
上平台和手持基座分别通过镍钛合金丝(线径0.4mm)与六组完全相同的驱动单元连接起来,镍钛合金丝与上平台和手持基座的连接方式为螺栓旋入压紧;与轴承组件和支架之间采用了一种强力胶水进行固接。
2.5 预紧弹簧
预紧弹簧(MISUMI,AWA3-25,弹簧定数为24mN/mm)连接于上平台与手持基座之间,用于为微型电机提供一定的预紧力,防止螺纹杆与电机体之间产生间隙,避免影响运动精度。
综上所述,所设计手持机器人(包括手术器械)的结构参数如表1所示。

表1 手持式机器人结构设计参数
3 运动学分析
采用矢量分析法[14],对所设计手持式机器人进行运动学分析,运动学模型如图5所示。

图5 手持式机器人运动学模型
假设手术器械尖端的位置和姿态是给定的,然后求解驱动单元的长度,即l=[l1,l2,l3,l4,l5,l6]T。
逆向运动学方法如下:
分别在上平台以及手持上建立动坐标系P-OXYZ和定坐标系B-OXYZ,可得封闭环方程为

(1)
其中,li表示第i个驱动单元的向量,i=1,2,…,6。BP为上平台的中心位置运动后在B-OXYZ下的坐标表示,BRP为上平台的姿态矩阵,Ppi为向量OPPi在P-OXYZ下的坐标表示,Bbi为向量OBBi在B-OXYZ下的坐标表示。
为得到每个驱动单元的长度,将(1)式两边分别点乘自身得

(2)
因此,对于i=1,2,…,6,每个驱动单元的长度可由下式唯一确定

(3)
特别地,所设计手持式机器人涉及一个远运动中心点(RCM)用于与微创切口相吻合,以满足例如视网膜手术,神经外科手术等显微外科手术微创性的需要。
在施加了RCM作为不动点之后,需要进一步确定BP和BRP的表达式来得到li。手术器械的方向向量可通过矢量法来进行求解,如式(4)

(4)
式中,s为手术器械运动到某一时刻下的方向向量,OB为基坐标系中的原点,Pe为手术器械的尖端,Pm即为RCM。
于是,通过给定器械尖端的位置,即可确定上平台在运动后的中心位置,如式(5)
BP=OBP0+P0Pe-l0s
(5)
式中,P0为上平台的初始中心位置,l0为手术器械的长度。
手术器械随着上平台同步运动,因此手术器械与运动平台的姿态矩阵BRP是相同的,可通过RPY角在(6)中进行描述。
BRP=RRPY(α,β,γ)=Rx(α)Ry(β)Rz(γ)

(6)
式(6)中,Cθ=cosθ,Sθ=sinθ,θ=α,β,γ;α为手术器械绕X轴旋转的角度,β为手术器械绕Y轴的旋转角度,γ为手术器械绕Z轴的旋转角度。
式(6)姿态矩阵中的α,β,γ可以通过以下方法求解得到
BRPs0=s
(7)
s0=[0 0 1]T
(8)

(9)
式(7)-(8)中,s0为手术器械初始状态下的方向向量,由于手术器械绕Z轴的旋转运动不会对外科医生的手术操作产生影响,因此将γ设定为零。
在确定了α,β,γ角的大小后,将式(9)代入到(6)中,得到旋转矩阵BRP的表达式,最后,将式(5)和(6)代入到式(3)中,即可得到每个驱动单元的长度li。
4 工作空间分析
工作空间是评价并联机器人能否完成某一作业的重要性能指标,是实现后续控制和应用的基础[15]。本文所设计手持式机器人的工作空间主要体现在手术器械尖端的运动所能到达的位置空间,而手术器械固定在上平台上,尖端的运动受到了调节机构Gough-Stewart并联平台的几何结构尺寸的限制,同时在引入了与微创伤口相吻合的不动点RCM后,尖端的运动空间也受到了一定的限制,因此,本文采用了基于运动学逆解的快速极坐标搜索法[16]对机器人的位置工作空间进行求解,利用MATLAB编写程序,绘制出位置工作空间的三维图形。
方法具体步骤如下:
1) 根据前述给出的手持式机器人结构设计参数,将手术器械尖端可能到达的位置工作空间定义为搜索空间,估算最大不超过直径6mm,高度4mm的圆柱体,将此空间分割成微分子空间,每一微小空间的高度从Zmin=0开始,搜索步长ΔZ=0.1mm,直至Zmax=4mm,如图6所示。

图6 工作空间微分子空间
2) 利用极坐标表示每一个微小子空间内的点,极角从初始值γ0=0开始,步长Δγ=π/64,直到2π,极径从初始值ρ0=0开始,步长Δρ=0.1mm,直到ρmax=3mm,微分子空间搜索截面如图7所示。

图7 微分子空间搜索截面图
3) 将搜索空间内的所有离散点代入到所建立的运动学模型中,输出符合杆长,转角约束条件的坐标点,从而绘制出手术器械尖端在初始姿态下的位置工作空间,如图8所示。

图8 初始姿态下的位置工作空间
其中,工作空间在XY,YZ,XZ面的投影如图9-11所示。

图9 工作空间XY面投影图
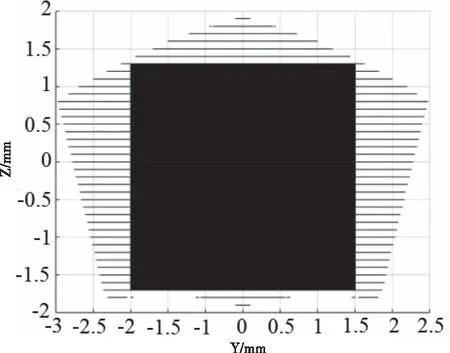
图10 工作空间YZ面投影图

图11 工作空间XZ面投影图
从图9-11可以看出,手术器械尖端在Z方向的最大移动范围为±2mm,X方向上的移动与Y方向具有一定相似性,最大范围均为±2.5mm,可以达到预期的工作空间要求。
5 实验测试
根据本文提出的设计方案,制造出手持式机器人原理样机,并进行了接地版本的测试,搭建实验平台如图12所示。

图12 接地实验测试平台
依据预期的工作空间,对人手颤动最需要补偿的X和Y两个方向运动进行相对定位精度测试。以150μm为步长前进和后退,进行20步测试得到误差分布情况如图13所示。

图13 X和Y向±1.5mm范围内相对精度
图13显示出在预期工作空间内,手术器械尖端在X和Y两个方向的实际运动位置相对于理论位置的误差。
6 结论
本文设计了一种用于显微外科手术的手持式机器人,通过以上讨论,得出以下结论:
1) 手持式机器人的设计结合Gough-Stewart构型的特点,并采用镍钛合金丝作为柔性铰链,使得本手持式机器人比一般手持式机器人结构更加紧凑,并能够实现更大的运动范围。
2) 采用矢量分析法,提出了一种基于远运动中心点的逆向运动学模型,使得手术器械的运动能够满足显微外科手术的微创性设计要求。
3) 基于快速极坐标搜索法,结合逆运动学模型对手术器械尖端的工作空间进行了仿真分析,仿真结果表明,所设计手持式机器人的可达工作空间能够完全覆盖预期直径3mm,高度3mm的圆柱体区域,优于一般手持式机器人的工作空间。
4)制造原理样机,搭建实验平台,在预期可达工作空间内,对X和Y方向的相对运动精度进行测试,结果表明,手持式机器人末端以每步150μm进给下运动,在X方向最大相对误差精度<3.8%,在Y方向最大相对精度<5.7%,满足显微外科手术的设计要求。
后续将对手持式机器人进一步设计,增加抓握外壳,并配置传感器以采集外科医生的手颤运动,以便进行手持式机器人的手持版本测试。
