基于MPC-PI的混合动力系统能量管理策略
2022-12-24刘佩松肖玲斐陈勇兴
刘佩松,肖玲斐*,2,陈勇兴
(1.南京航天航空大学能源与动力学院,江苏 南京 210016;2.浙江大学流体动力与机电系统国家重点实验室,浙江 杭州 310027)
1 引言
随着能源危机的加剧、民众对环保问题的逐渐关注及航空业对降低飞行成本的需求,电气化飞机应运而生[1]。在21世纪初,如B787、F35等多电飞机(More electric aircraft, MEA)出现,将传统飞机以机械能、液压能、气压能等形式存在的二次能源逐步统一为电能[2]。多电飞机电气设备众多且功率更大,电气负载的变化将会对供电系统带来影响,因此需要减小冲击、提高能量利用率、保证系统稳定性[3]。多电飞机电力系统中典型负载由功率转换器控制,因此常表现为恒功率负载(Constant power loads, CPL),使得系统稳定性降低[4]。
具有削峰填谷作用的储能技术是降低负载影响及提高能量利用率的一大研究方向,该方法通过储能系统提供峰值功率需求,吸收多余功率。针对带储能设备的微电网或混合动力系统(Hybrid power system, HPS)的能量管理,国内外众多学者进行了相应研究。文献[5]针对拥有蓄电池及超级电容的混合储能直流微电网,提出了一种自适应能量管理策略,并证明该方法可减轻电气负载的影响。文献[6]针对串联混合动力汽车,提出了基于改进猴群算法的能量管理策略。文献[7]对具备由蓄电池和超级电容组成混合能量储能系统(Hybrid energy storage system, HESS)的纯电动汽车的能量管理,利用庞特里亚金的最小原理进行了研究。针对机载系统,文献[8]采用模糊控制方法,为适用于多电飞机电网的蓄电池-超级电容混合储能系统设计了三级控制策略。除了考虑混合储能系统外,为了对能量进行综合管理,学者们还将燃料电池与储能设备构成HPS。文献[9]提出了一种基于改进的下垂控制的分散式能量控制策略,并应用于多电飞机。文献[10]对包括燃料电池、蓄电池及超级电容在内的飞机应急动力系统能量管理进行了研究,并分析了5种能量管理策略的优劣。
模型预测控制(Model predictive control,MPC)问世于上世纪70年代,其原理可归结为:模型预测、滚动优化、反馈校正[11]。预测控制的一大优势是能够处理带约束的问题,因此在如电力电子、机器人等广泛的领域都得到了研究和应用[12,13]。同时预测控制也在航空领域有一定的研究与应用。文献[14]针对航空发动机的故障,提出了基于在每个采样时间调整预测模型的主动容错控制方法。文献[15]提出了一种基于预测控制实现对多电飞机电力负荷瞬态的处理的方法,但未考虑超级电容及燃料电池。文献[16]通过对接触器建模,利用随机预测控制(Stochastic model predictive control,SMPC)方法实现对飞机配电负荷的管理,但并未考虑HPS的引入及影响且未对随时间变化的负载进行深入研究。文献[17]使用预测控制方法研究了包含有燃料电池、蓄电池及超级电容的混合动力系统的能量管理,但未考虑约束,仅将预测控制的优化问题转变成动态规划求解的问题。
本文以MPC为基础,对混合动力系统的能量管理策略进行了研究。考虑到变化的负载引入会使系统稳定性降低,同时为了提高能量利用率,因此应用了包含蓄电池、超级电容及燃料电池等在内的混合动力。同时引入反馈校正,提出了一种基于MPC-PI的能量管理策略。通过该策略,提供峰值功率或回收多余功率,增加直流母线稳定性,提高能量利用率。最后通过Matlab/Simulink验证了所提方案的有效性。
2 多电飞机混合动力系统
多电飞机混合动力系统见图1,包括同步发电机、变压整流器、负载、超级电容、蓄电池、燃料电池及相应的电力电子变换器。它们通过直流母线连接。当负载突增时,超级电容、蓄电池及燃料电池一起提供峰值功率,降低负载突增对直流母线电压的影响。当负载突降时,超级电容及蓄电池吸收多余功率,降低对母线电压的影响,并且提高能量利用效率。
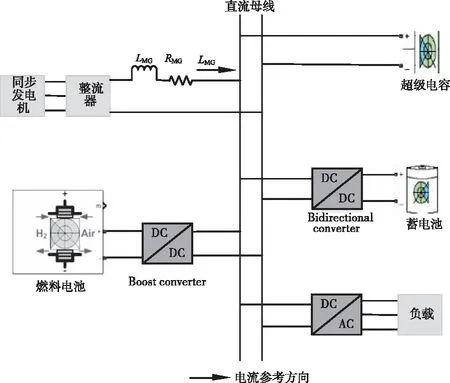
图1 混合动力系统结构
2.1 直流母线建模
将同步发电机与变压整流器看作一个直流电源,产生的电流通过电感LMG与电阻RMG后与直流母线相连。令与直流母线相连时输出电压为VMG、电流为IMG,其方向见图1。因此,可将该直流微电网建模为如式(1)所示

(1)
2.2 储能设备建模
蓄电池能量密度高,但体积功率密度相对较低,且其频率较低;而超级电容有高功率密度及较高频率,因此本文采用二者联合的方式进行储能。如图1所示,超级电容与直流母线直接相连,蓄电池通过双向DC/DC变换器与直流母线连接。
本文所用电池为锂离子电池,采用Matlab的电池模块,且选择放电模型如式(2)所示
(2)
式中:Vbat为蓄电池输出电压,E0为额定电压;K为极化电阻,Q为最大电池电容,it为已提取的电容,i*为低频电流动态,Ab为指数电压,Bb为指数电容。
超级电容与直流母线直接相连,因此有
(3)
式中:CSC为超级电容的电容,VSC为超级电容与直流母线的共同的电压,ISC为通过的电流。
2.3 燃料电池建模
燃料电池相较于蓄电池和超级电容具有清洁和能量密度高的优点,可优势互补。本文所采用的燃料电池以氢气为燃料。将燃料电池动态变化表示为如式(4)所示
(4)
式中:Vfc为燃料电池输出电压,Vfc0为初始电压,Ifc为燃料电池电流,Rfc为等效电阻。
3 MPC-PI控制器设计
本文所设计的MPC-PI控制器结构见图2。在预测控制器中,将修正后的预测值yp1(k)与目标输出R(k)对比,经过滚动优化获得控制量u(k),并将u(k)给到混合动力系统及预测模型。同时,将该时刻混合动力系统直流母线电压Vdc(k)与参考电压270V对比,经PI控制器获得控制量uPI(k),并给到混合动力系统。此外,考虑到可能出现的模型失配等问题,引入了反馈校正环节。对实际输出y(k)与预测模型输出yp0(k)间偏差进行修正,将该偏差乘以修正系数K获得修正量,再将修正值与原预测模型输出相加获得修正后的预测值。

图2 MPC-PI控制器
3.1 预测模型
为了将式(1)-(4)所描述的模型表示成状态空间,选择控制量如下
u=[Ibat,Ifc]T
(5)
选择状态量如下
x=[IMG,VSC,Vbat,Vfc]T
(6)
选择输出量如下
y=[VSC,Vbat,Vfc]T
(7)
选择操作点如下:
(8)
利用Jacobian线性化方法,在操作点处对模型进行线性化,有:
(9)
t时刻的状态见式(10),对状态量进行增广:
(10)
将式(9)转变成式(11)所示
(11)

随后按采样时间T离散,得到式(12),如下:
ξ(k+1)=Ak,zξ(k+1)+Bk,zΔu(k)
y(k)=Ck,zξ(k)
(12)
为符合预测控制常规表示方法,将式(12)记为:
x(k+1)=Ax(k+1)+BΔu(k)
yp0(k)=Cx(k)
(13)
预测的未来时刻的输出及控制量增量见式(14)

(14)
式中:p表示预测时域长度,Nc表示控制时域长度。可将式(13)表示为如式(15)
Yp0(k)=φx(k)+GΔU
(15)
式中
3.2 反馈校正
令k时刻预测跟踪误差为
e(k)=y(k)-yp0(k)
(16)
修正后k时刻的预测输出为
yp1(k)=yp0(k)+Ke(k)
(17)
其中K为修正系数,取0到1之间。
修正后的预测输出矩阵为
Yp1=Yp0+Ke
(18)
3.3 优化目标函数
令目标输出信号如式(19)所示:

(19)
选择优化目标函数如式(20)示:
(20)
式中:Q、W分别为输出误差及控制量增量权重矩阵。
因直流母线电压稳定对该混合动力系统意义重大,在优化时给与直流母线电压最大的权重系数。此外,飞行途中,燃料电池中燃料不能补充,因此需要降低燃料电池中消耗的氢气量,给与燃料电池较大的权重系数。
3.4 约束处理
考虑输出约束,如式(21)所示
ymin≤y≤ymax
(21)
可将约束求解问题表示为如式(22)所示
M3ΔU≤N3
(22)

为利用二次规划(Quadratic programming,QP)求解器进行求解,需要将一般的预测控制求解的描述,转变成一般的QP问题的描述。因此,令
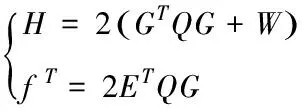
(23)
如此,将预测控制的优化问题转变成典型的QP问题,即在形如约束Ax≤b下,求解最优控制序列使得式(24)表示的目标函数最小。
(24)
4 仿真验证与分析
为验证本文采用的多电飞机混合动力系统及所提出的MPC-PI能量管理策略的有效性和可行性,利用Matlab/Simulink平台对该策略进行仿真验证。所搭模型仿真运行采样时间为0.1ms,为降低计算量,提高所提策略实时性,预测控制器的采样时间为10ms。
4.1 负载变化
本文考虑了随时间变化的负载对混合动力系统的影响。其中,第2-12秒为时变负载,第12秒突然卸去所有负载。该混合动力系统负载变化见图3。
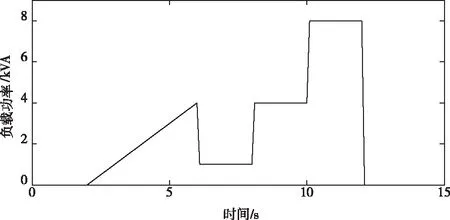
图3 负载功率变化
4.2 混合动力系统参数
该混合动力系统各参数见表1。
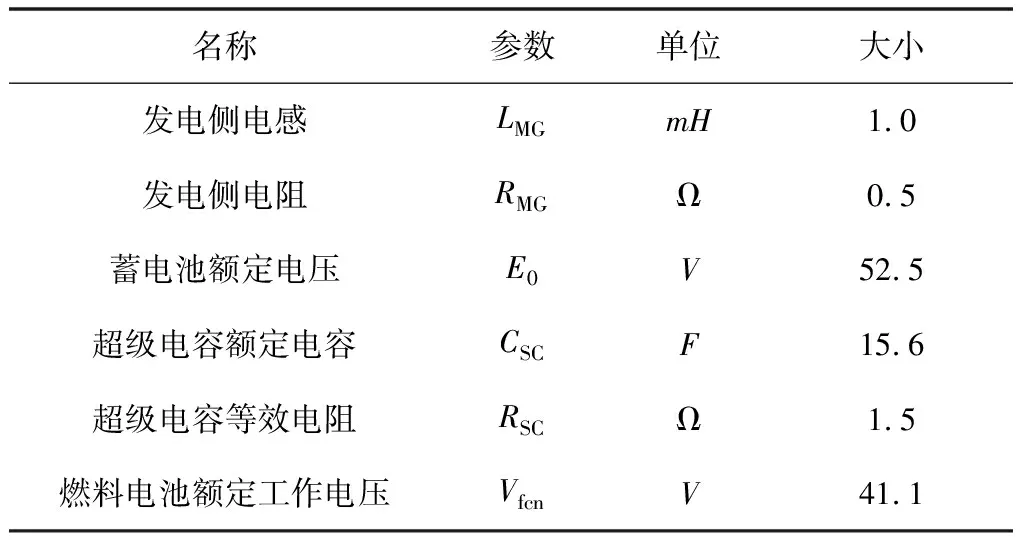
表1 混合动力系统参数
4.3 MPC-PI参数
MPC-PI各参数见表2。
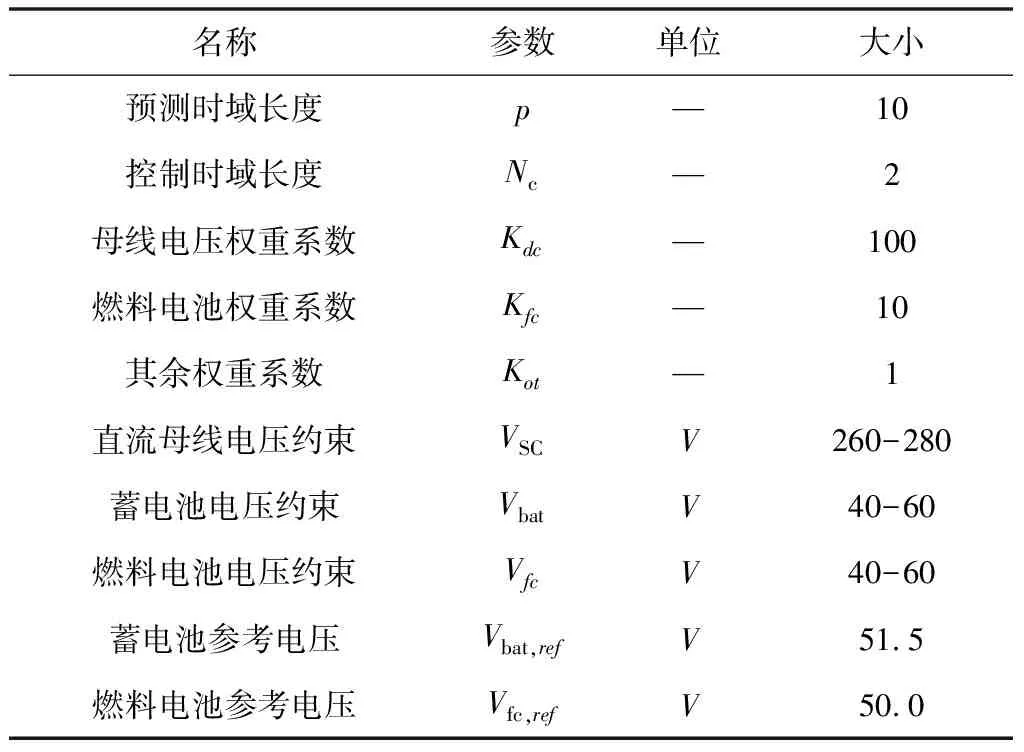
表2 MPC-PI参数
4.4 仿真结果与分析
将提出的MPC-PI能量管理策略与传统的PI控制方法进行对比,结果见图4-8。图4为两种控制方法下,随着不确定负载变化,直流母线电压随时间变化的规律,总体而言,MPC-PI控制下直流母线电压更稳定,基本保持在265~275V,直流电压波动更小。
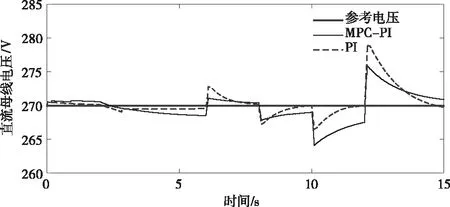
图4 直流母线电压
由图5及6可以看出,MPC-PI控制时蓄电池及燃料电池电压更加接近参考电压信号,较PI控制时更加稳定。由图7可知,以MPC-PI为能量管理策略较以PI为管理策略,消耗燃料电池中氢气的量更少。观察可知,经过15秒仿真,MPC-PI控制下燃料电池所消耗氢气量仅为PI控制下的28.2%,证明所提MPC-PI策略较传统PI方法更加节约燃料电池中燃料,更节能高效。
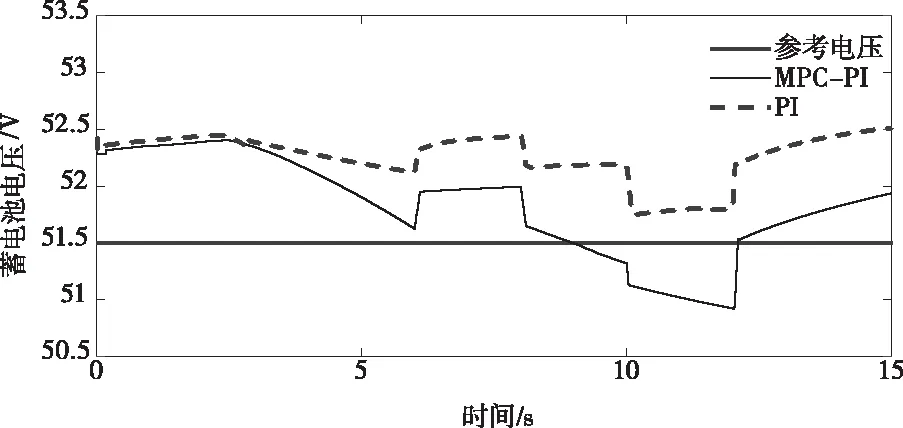
图5 蓄电池电压
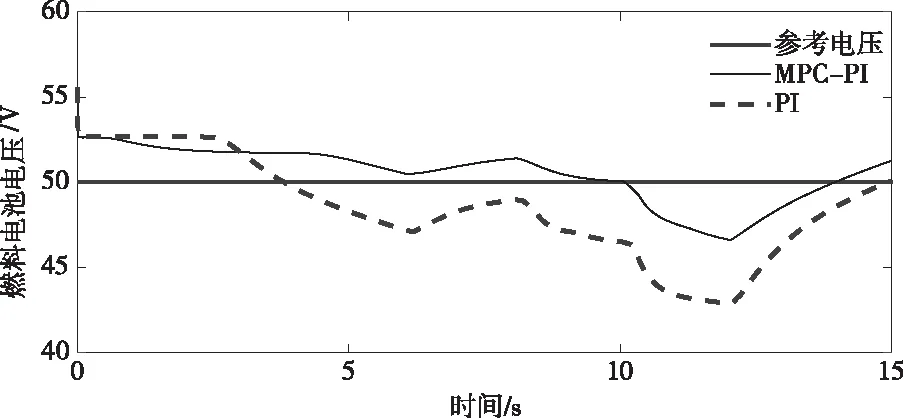
图6 燃料电池电压
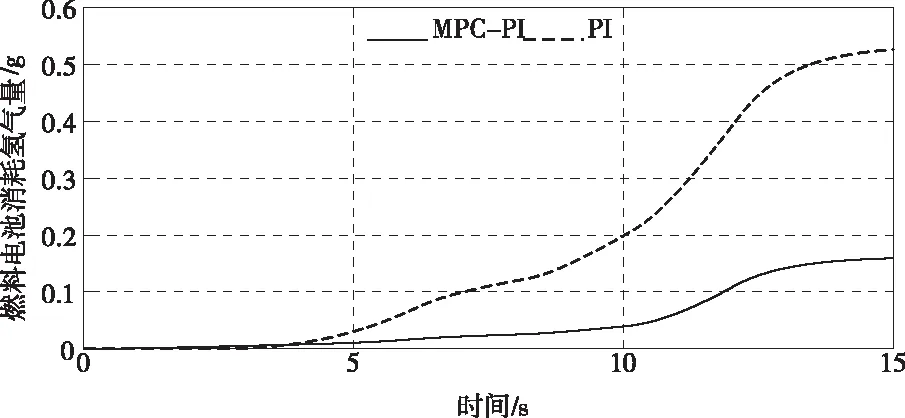
图7 燃料电池消耗燃料量
MPC-PI控制下功率分配情况见图8。在0-10秒,MPC-PI控制下,燃料电池输出功率较PI少很多,此阶段负载功率主要由蓄电池超级电容等提供。随着10-12秒负载变为8kVA,MPC-PI控制下燃料电池开始大量提供功率。与图7对比知,此时氢气消耗也随之上升。此外,由图4-7可知,所提MPC-PI策略满足表2中相关约束。
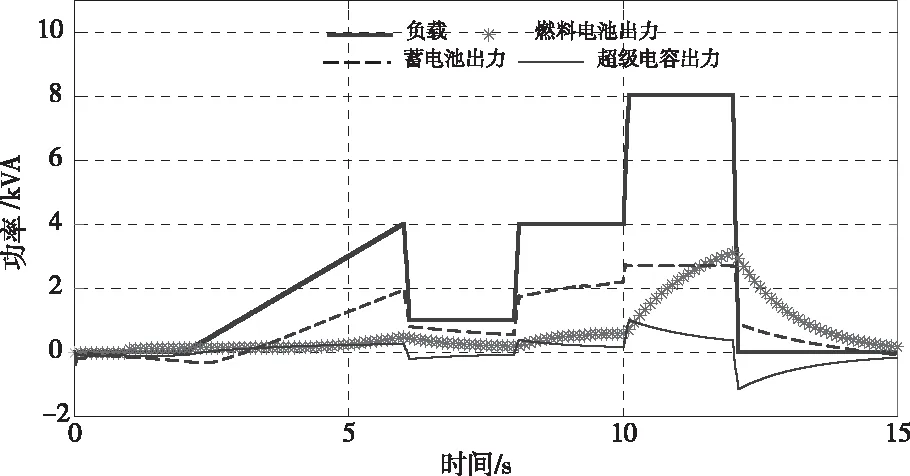
图8 MPC-PI控制下功率分配
5 结论
本文首先针对一种多电飞机混合动力系统建立了数学模型,将模型预测控制应用于该系统,结合反馈校正策略,提出了一种MPC-PI结合的能量管理策略,并考虑了时变负载对该系统电压稳定性的影响。包含储能设备的混合动力系统可以有效降低负载变化对整个系统稳定性的影响。通过仿真证明了所提策略相较于传统PI方法的有效性,不仅使得系统稳定性增加、提高了能量利用效率,而且可以在设计策略时考虑到实际情况下的约束并合理处理约束,满足约束需求。
未来将考虑把航空发动机等整合到已有系统中,完善系统架构,进行更加综合的能量管理,提高能量利用率、减少飞行中的污染。
