分散式布局景观建筑虚拟VR重构方法仿真
2022-12-24吴一非杜尚广
吴一非,杜尚广
(1.江西科技学院,江西 南昌 330000;2.南昌大学生命科学学院,江西 南昌 330000)
1 引言
人类社会在进入二十一世纪之后飞速发展,在文化和科技快速发展的背景下人类感知知识的方式也随之变化,在计算机技术的支持下生成了虚拟现实技术[1],人们开始采用虚拟现实技术获取多样性的环境空间。随着虚拟现实技术的发展,针对分布式布局景观建筑的多元化展示和方案设计,人们提出了更高的要求[2]。在城市未来分散式布局景观建筑设计中,虚拟现实技术成为主要设计手段,具有便捷和多元化的特点。
张宏鑫[3]等人通过视觉里程计采集景观建筑的空间位置姿态和关键帧图像序列,通过运动恢复结构算法在景观建筑三维重构过程中对相机位姿进行计算,采用立体几何算法获取景观建筑的点云数据,在相关规则的基础上获取景观建筑的轮廓布局,完成景观建筑的重构,该方法没有获取景观建筑影像的特征点,无法完整地获取景观建筑的轮廓,存在重构效果不佳的问题。秦斐[4]等人利用多元线性回归方程分割景观建筑的点云数据,结合聚类分析方法和梯度算子完成景观建筑的分区和边缘提取,实现景观建筑的三维重建,该方法没有进行特征点匹配处理,导致重构所用时间较长,且重构后的模型存在信息缺失现象,方法的重构效率低。
为了解决上述方法中存在的问题,提出基于VR的分散式布局景观建筑虚拟重构方法。
2 基于VR技术的数据获取与处理
基于VR技术的分散式布局景观建筑虚拟重构方法采用VR技术构建虚拟现实交互系统平台,获取分散式布局景观建筑的相关数据,平台结构如图1所示。
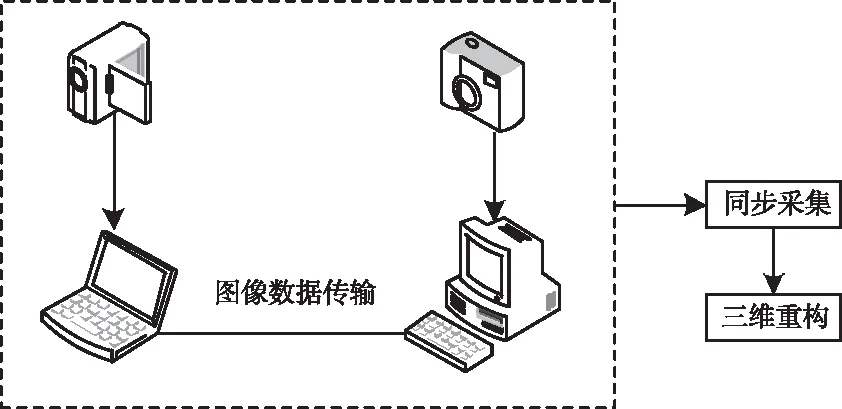
图1 虚拟现实交互系统平台
选用相机和摄像机作为虚拟现实交互系统采集数据的主要工具,采用内外参数标定方法在采集过程中进行相关标定处理。为了提高数据在虚拟现实交互系统中的传输速度,通过总线连接系统服务端和数据采集设备,并将数据采集设备与计算机连接。
将服务器设定的指令传输到虚拟现实交互系统的客户端后,采用外接触方式控制数据采集设备采集分散式布局景观建筑的相关信息。虚拟现实系统的客户端程序对数据采集设备获取的信息进行处理[5,6],主要内容是纠正获取的数字影像。将点云坐标系作为物方坐标系,在共线方程的基础上,在相面中获取点云中点A(XP,YP,ZP)的对应点a(xp,yp)。通过下式对像点坐标(Δx,Δy)进行修正
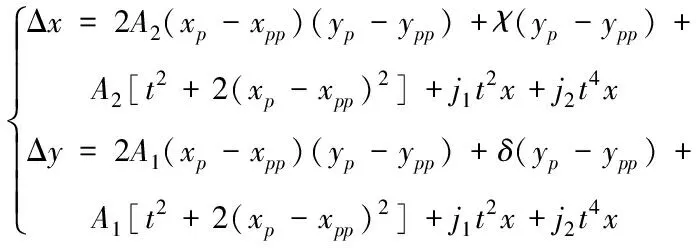
(1)
式中,A1、A2代表的是透镜对应的切向变形参数;χ代表的是x、y方向不垂直条件下景观建筑数字影像的几何修正参数;δ代表的是比例尺寸不同时景观建筑数字影像的几何修正参数;t代表的是镜头透镜在虚拟现实系统中的径向距离;j1、j2均代表的是光学透镜在虚拟现实系统中的径向变形参数。
服务端主机在虚拟现实系统中的主要任务是建立客户端的数据接收线程,并对数据采集过程中的光学畸变[7,8]进行校正处理:
1)径向畸变
由于透镜组的完整度较低,在采集数据的过程中容易出现像点偏离的现象,这种问题存在于不同位置中,通过下述函数模型对径向畸变进行校正
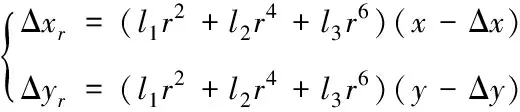
(2)
式中,r2=(x-Δx)2+(y-Δy)2,l1、l2、l3均代表的是径向畸变系数,对上式进行分析可知,畸变系数受径向畸变与主点距离和像点距离的影响。
2)切向畸变
设置切向畸变系数c1、c2,像点位移通常情况下是由切向畸变造成的,通过下述函数模型校正切向畸变

(3)
3)CCD面阵变形
利用下述公式表示CCD面阵的内部变形
(4)
上述畸变总和即为相机在虚拟现实交互系统中的总畸变,总畸变修正值可以表示为下式
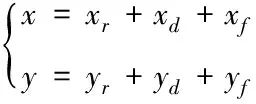
(5)
3 分散式布局景观建筑虚拟重构
3.1 特征点匹配
基于VR的分散式布局景观建筑虚拟重构方法采用SIFT算法[9,10]获取景观建筑影像的特征点,并进行特征匹配,具体步骤如下:
1)检测尺度空间中存在的极值,并确定关键点在景观建筑影像I(x,y)中的位置以及尺度。
用Z(x,y,ς)表示景观建筑的尺度空间,其表达式如下
Z(x,y,ς)=I(x,y)·H(x,y,ς)
(6)
式中,(x,y)为景观建筑图像点对应的像素坐标;H(x,y,ς)描述的是高斯函数,其尺度在畸变校正过程中是可变的;ς代表的是尺度空间因子,采用尺度空间中存在的DoG算子F(x,y,ς)确定关键点的尺寸
F(x,y,ς)=Z(x,y,kς)-Z(x,y,ς)
(7)
式中,k代表的是尺度系数。
2)对三维二次函数进行拟合处理,在计算过程中提高关键点尺度和位置精度,提高基于VR的分布式局部景观建筑虚拟重构方法的抗噪声能力,提高特征点匹配的稳定性。
3)在梯度方向中对关键点周围存在的像素分布特征进行分析,以此为依据对关键点在建筑影像中的方向参数进行计算,像素在关键点邻域内的梯度模值为q(x,y),可通过下式计算得到
q(x,y)=

(8)
其中,Z描述的是关键点在景观建筑影像中的尺度。
设ϑ代表的是像素在关键点邻域内的主方向,其计算公式如下

(9)
4)获得景观建筑影像的SIFT特征向量。
3.2 纹理映射
针对二维纹理空间中存在的空间点和三维物空间中存在的表面点,两点之间可通过纹理映射[11,12]完成彼此之间的转换,在三维物体表面中映射处理点在二维空间中对应灰度值或颜色值,根据映射结果构建分散式局部景观建筑的三维模型。
将物方点坐标和方位中存在的元素作为依据,通过共线方程获取纹理坐标。
1)纹理坐标
基于VR的分散式布局景观建筑虚拟重构方法采用数字化图像离散形式表示纹理空间,通常情况下该空间为正方形区域,针对纹理空间可以通过数学函数进行描述,每个点在纹理空间中对应的纹理像素描述的是颜色值或灰度值。
2)共线方程
设(X,Y,Z)代表的是点云中点A对应的空间坐标,中点A与坐标为(x,y,z)的点a相对应,利用下式完成二维数字影像与三维点云模型之间的映射处理
(10)
上式中的参数j1、j2可通过二元多项式计算得到
(11)
式中,mij、nij均代表的是二元多项式系数。
在拍摄过程中,由中心投射原理可知,地面、投影中心和像点三者之间属于共线关系,基于VR的分散式布局景观建筑虚拟重构方法通过共线方程对上述关系进行描述
(12)
式中,(x,y)代表的是景观建筑像点对应的像平面坐标;(x0,y0,v)代表的是景观建筑影像中存在的内方位元素;ς1、ς2、ς3代表的是方向余弦,可通过下式计算得到
(13)
式中,φ、μ、ρ代表的是景观建筑的外方位角元素,其中,ρ代表的是旁向倾角;μ代表的是相片倾角;φ代表的是航向倾角。
(Xs,Ys,Zs)代表的是物方空间坐标系;τ1、τ2、τ3为方向余弦,可通过下述公式计算得到
(14)
(XA,YA,ZA)代表的是物方点对应的物方空间坐标;υ1、υ2、υ3为方向余弦,其表达式如下
(15)
3)映射过程
获取二维纹理空间与三维物体空间之间存在的关系即为纹理映射的本质[13,14],即获取图像空间、物体空间和纹理空间之间存在的关系。
景观建筑的外方位元素可通过空三处理获得,在空间坐标系中计算景观建筑的影像姿态和空间位置。
在空三结果的基础上获得模型空间点A′(X,Y,Z)和影像空间点a′(x,y)之间的关系。纹理空间点(u,v)和模型空间点A′(X,Y,Z)之间存在的关系可通过共线方程获取。二维纹理空间与三维物体空间之间映射操作的实质是将影像空间a′(x,y)中存在的像素值赋值给纹理空间点(u,v),通过纹理映射完成分散式布局景观建筑的虚拟重构。
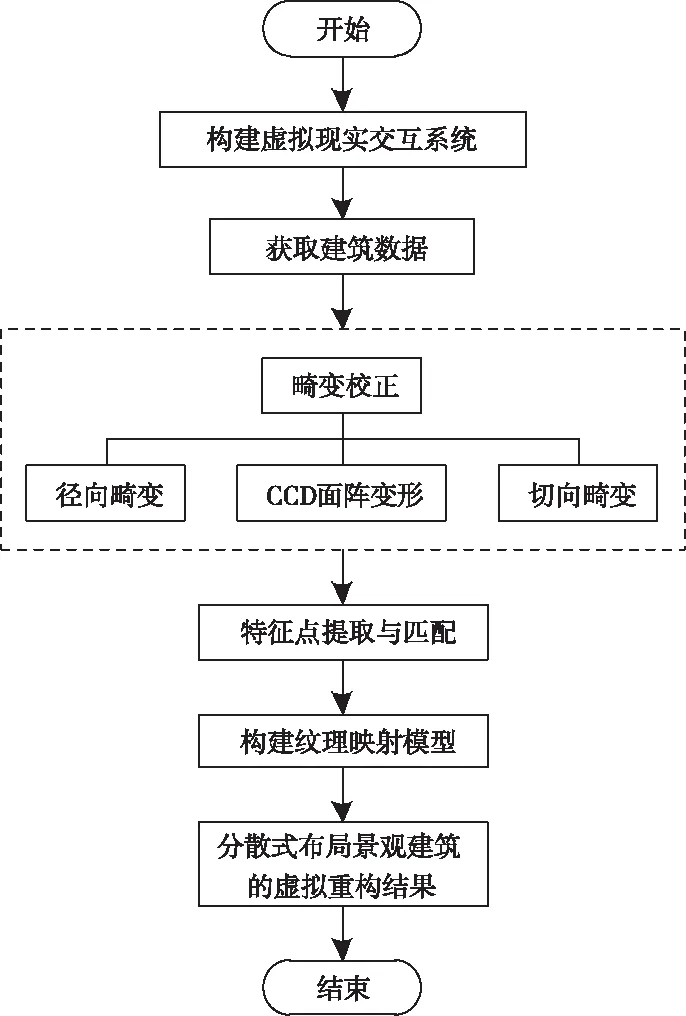
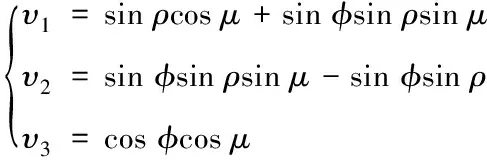
图2 分散式布局景观建筑虚拟重构流程图
基于VR的分散式布局景观建筑虚拟重构方法对景观建筑进行虚拟重构的具体过程如下:
1)采用VR技术构建虚拟现实交互系统,采集分散式布局景观建筑的相关数据;
2)对数据进行校正处理,利用校正后的数据对径向畸变、切向畸变和CCD面阵变形进行校正处理;
3)采用SIFT算法[15]获取特征点,并完成特征点匹配;
4)构建纹理映射模型,完成分散式布局景观建筑的虚拟重构。
4 实验与分析
为了验证基于VR的分散式布局景观建筑虚拟重构方法的整体有效性,在MATLAB仿真软件的支持下进行实验验证。分别采用基于VR的分散式布局景观建筑虚拟重构方法、文献[3]方法和文献[4]方法进行虚拟重构测试。
将运算时间和迭代次数作为指标,对所提方法、文献[3]方法和文献[4]方法的重构效率进行测试,测试结果如表1所示,为了提高测试结果的精准度,本次测试选取10处分散式布局景观建筑。
表1 重构效率测试结果
分析表1中的数据可知,三种方法的运算时间与迭代次数之间成正比关系,迭代次数越高,方法的运算时间越长,相反,迭代次数越低,方法的运算时间越短。对所提方法、文献[3]方法和文献[4]方法的测试结果进行分析可知,所提方法对分散式布局景观建筑进行虚拟重构时,迭代次数在7-9之间,运算时间为6.0-6.3s,文献[3]方法进行虚拟重构测试时,迭代次数在14-17之间,运算时间为11.0-12.9s,采用文献[4]方法对虚拟建筑进行重构时,迭代次数在20-23之间,运算时间为15.1-17.0s。对比三种方法的测试结果发现,所提方法的迭代次数和运算时间均低于文献[3]方法和文献[4]方法的测试结果,表明所提方法具有较高的重构效率。
采用所提方法、文献[3]方法和文献[4]方法对典型的分散式布局景观建筑进行虚拟重构,测试结果如图3所示。
由图3可知,采用所提方法进行重构时,获得的重构结果较为完整,文献[3]方法在重构过程中存在信息缺失的问题,采用文献[4]方法进行测试时,获得的重构结果无法体现建筑的细节信息。通过上述测试可知,所提方法的重构结果最佳,表明所提方法具有较好的重构性能。
5 结束语
在计算机视觉领域和摄影测量领域中,建筑虚拟重构一直属于研究热点,相关研究成果较多。但分散式布局景观建筑的复杂性较高,目前的重构方法无法实现全自动重构,需要对其进行分析和研究。目前建筑虚拟重构方法存在重构效果较差、重构效率低的问题,提出基于VR的分散式布局景观建筑虚拟重构方法,通过VR技术获取建筑信息,根据获取的信息建立纹理映射模型完成分散式布局景观建筑的虚拟重构,解决了目前方法中存在的问题。
