轮步复合式移动机器人移动机构设计
2022-12-23王立华任重义
王立华 任重义
1. 宁夏华振司法鉴定中心 宁夏 银川 750001;2. 宁夏大学机械工程学院 宁夏 银川 750021
引言
轮步复合式移动机器人经常遇到在复杂环境中易陷于沙地中而无法进行自救脱陷以及面对沙地、松软地质时很难快速高效通行的问题,从而为沙漠探测与救援、外星球探测等方面的移动机器人移动机构提供了参考。本文中提出了一种全新的轮步复合移动结构,车轮可在轮子与轮步之间切换,同时具有轮式机器人移动速度快,能耗小的优点和腿式机器人良好的沙土脱陷的能力。
1 设计需求分析及总体设计
1.1 移动方式及速度需求
本文所设计轮步复合式移动机器人移动机构的运动执行状态则可分为轮行、步行运动、轮步复合三种状态[1]。其中轮行运动设计是为了使移动机器人拥有较高的移动速度,鉴于本文所设计的轮步复合式移动机器人主要用于沙漠探测与救援、外星球探测等工作,因此其移动速度不宜过快,以免遗漏待救援人员或是探测点,但也不宜过慢,以防耽误救援时间或探测任务。综合上述理由,故将轮行移动速度设定为0-5.5m/s。
1.2 动力需求
本文所设计的轮步复合式移动机器人移动机构的主要动力是由蓄电池提供电能,通过电动机转化为转动的机械能,选用功率为3kw的直流无刷电机作为驱动的电机。
1.3 外廓尺寸及重量
移动机器人在完成沙漠探测与救援、外星球探测等工作中,难免会遇到一些陡坡或是高低不平的地面,因此就需要较高的稳定性,所以本文所设计的轮步复合式移动机器人移动机构是将两前轮之间的距离加大,设定为1.88m;两后轮之间的距离加大,设定为1.47m,箱体的长、宽、高设计成大长度,小宽度和高度,设定为2.5m、0.75m、0.5m;箱体底面距底面的高度降低,设定为0.24m[2-3]。为了降低轮步复合式移动机器人陷于松软沙地的概率,降低移动时的能量损耗,增加续航能力,由此将轮步复合式移动机构的整体质量设定为150kg。
本文所设计的轮步复合式移动机器人移动机构不需要过高的负载能力,将其设定为60kg。
1.4 总体方案设计
本文提出一种简单的轮步复合式移动机构方案,设计了双摆杆(步行驱动杆和步行从动杆)折臂加轮子的机构,通过转动步行驱动杆改变双摆杆之间的夹角,从而实现改变前后轮轴距的目的,并且通过对前、后轮制动与驱动状态之间的切换,利用双摆杆折臂机构对轮轴提供水平外力,来实现轮步复合式移动,如图1所示。
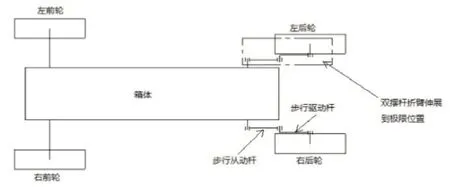
图1 轮步复合式移动机构方案设计图
2 移动机构零部件结构设计
2.1 移动机构箱体设计
本设计的箱体材料采用超硬铝合金,目的是在保证足够强度要求的条件下,使机构整体重量最轻化。箱体的长度设计为2.5m、宽度为0.75m、高度为0.5m,大长度、小宽度和高度的设计其一是为了减小机器人高速行驶时与空气的接触面积,从而减小风阻提高行驶效率,另外是为了给后面的步行机构提供足够的空间。
箱体的底板厚度为0.05m,壁厚为0.01m,厚底板、薄壁厚的设计是在结构轻量化的条件下能最大限度地提高箱体的负载能力。底板上附加有固定前后传动轴的轴承座,以加强筋的方式焊接在箱体底板上。箱体外两侧延伸出长为0.6m、宽为0.15m、厚为0.02m的前轮支撑架,目的是为了增加箱体的宽度,从而提高其稳定性,其具体结构如图2所示。
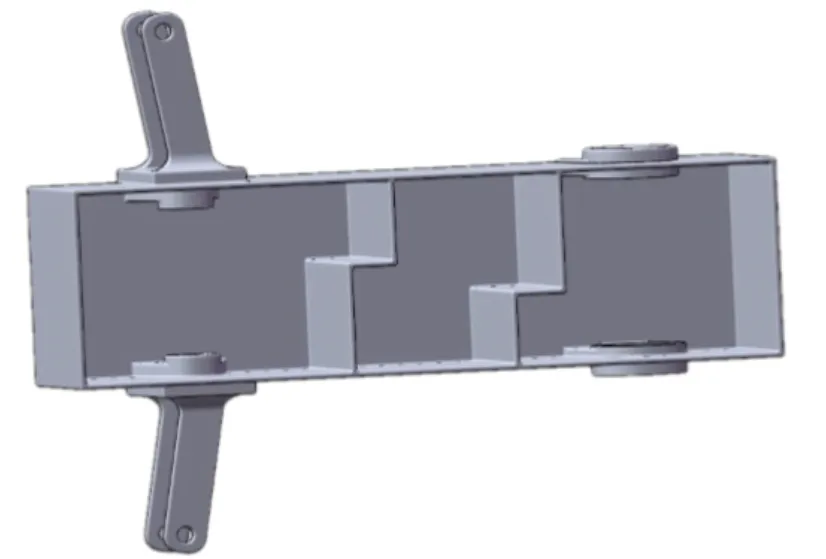
图2 轮步复合式移动机构箱体
车轮分为橡胶轮胎和铝合金轮毂两部分,其直径设计为0.88m,宽度设计为0.2m。采用宽大橡胶轮胎是为了增加轮子与地面摩擦力和接触面积,从而提供更好的抓地性和降低其与地面的压强,不易陷于沙地中。
2.2 移动机构驱动、制动设计
电动机均选用机械式制动。机械式制动就是指利用机械装置使电动机切断电源后通过增加角移式闸瓦和制动闸轮相接触间的压力,产生摩擦力来完成制动,使其立即停转[4]。其中直流电动机可实现电机断电制动,从而实现车轮的制动与驱动状态间的切换和步行机构的运行。
电动机与箱体之间用M16的螺栓进行连接,减速箱减速比均设计为i=2∶1,其目的是在保证给主传动轴提供足够的转速的情况下,增加传动轴的扭矩。减速箱与箱体间也用M16的螺栓进行连接,其具体结构如图3所示,左图为前减速箱,右图为后减速箱。

图3 轮步复合式移动机构减速箱
3 移动机构结构设计
3.1 前、后驱机构设计
前驱机构采用了十字轴式万向联轴器与前轮轴结合的传动方式,实现增加两前轮之间的间距的目的[5]。通过前传动轴将动力传给万向联轴器,再传给前轮,同时,在前轮支撑架中间用圆形十字支撑架固定前轮轴,这样以便于实现在拥有前驱动的同时又能进行转向,控制机器人的行进方向。采用这种传动方式为的是给机器人提供前后四驱动,达到更好的爬坡越坑脱陷的能力。
后驱动机构由后传动轴、后传动轴上的皮带轮,步行驱动杆、步行从动杆内的皮带轮,连接步行驱动杆、步行从动杆的传动轴1,连接后轮的传动轴2以及固定各传动轴的轴承组成,由后传动轴通过各皮带轮、各传动轴以带传动的方式将动力传递给后轮,实现后驱动。由于后传动轴输出的转速是经过后驱减速箱减速的,加之考虑到移动速度不宜过快也不宜过慢,故将带传动比设定为1∶1。其结构如图4所示。
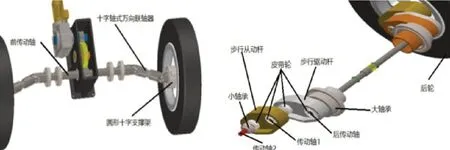
图4 前后驱机构
3.2 步行机构设计
步行机构采用的是双摆杆折臂机构,主体上由步行驱动杆、步行从动杆、行星齿系、轴承座、步行传动轴、大轴承、小轴承、传动轴1、传动轴2和后轮组成,步行驱动杆通过大轴承与箱体连接,通过行星齿系进行运动。
由于电机转速普遍较快,而步行驱动杆在实际应用时的转速要求很低,以确保输出的扭矩更大,因此将行星齿系的传动比设定为36∶1。步行驱动杆的转动范围在上半圆内,步行从动杆通过传动轴1和小轴承与步行驱动杆杆连接,由步行驱动杆的转动带动其进行运动。其具体结构如图5所示。
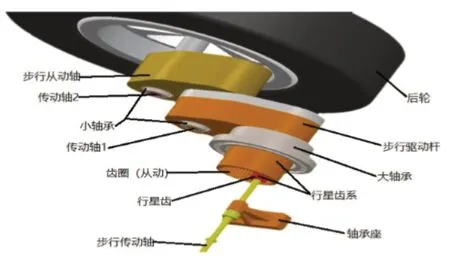
图5 步行机构
3.3 总体设计
通过对轮步复合式移动机器人移动机构的设计需求分析、设计方案确定以及主要零部件的设计介绍,可得到轮步复合式移动机器人移动机构总体设计的三维模型图,如图6所示。
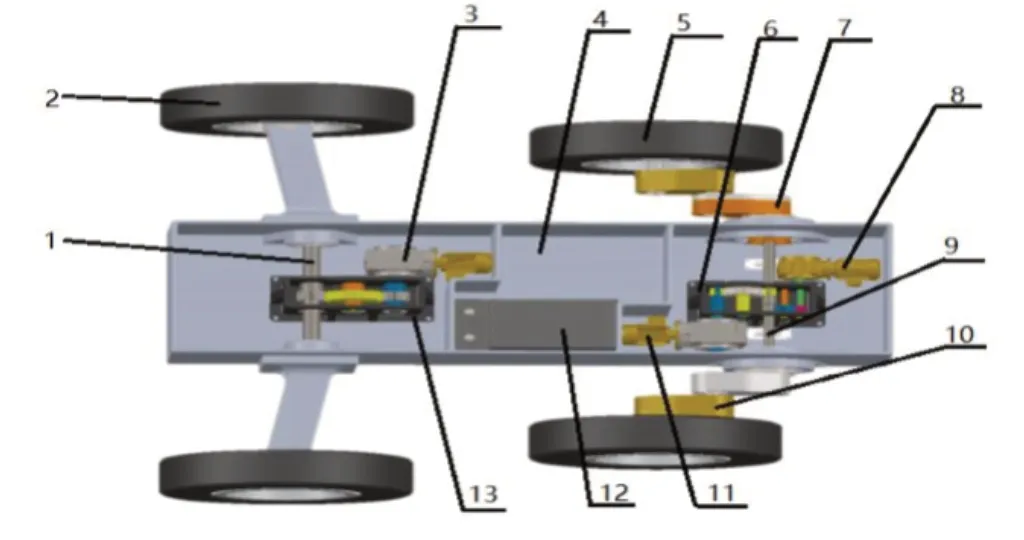
图6 轮步复合式移动机构三维模型图
4 轮步复合式移动机构运动执行及功能
本文所设计的轮步复合式移动机器人移动机构的运动执行状态分为轮行、步行运动、轮步复合三种状态。
4.1 轮行、步行运动
轮行运动依靠铅酸蓄电池提供电力给前驱制动电机、后驱制动电机,制动电机通电后,解除制动开始转动。
步行运动是通过铅酸蓄电池提供电力给步行制动电机,步行制动电机通电解除制动,将动力通过后驱减速箱传递给步行传动轴,步行传动轴通过行星齿系将动力传给予其固接的步行驱动杆、步行驱动杆缓慢转动,带动与步行驱动杆通过传动轴、小轴承转动连接的步行从动杆,在重力作用下步行运动。
4.2 轮步复合运动
当移动机器人陷在松软沙地时,就需要轮步复合运动系统。轮步复合运动的实现是通过轮行运动与步行运动机构相结合实现。本文以前轮陷入沙地为例采用复合运动方式实现脱困,后轮脱困方式与之相似。
铅酸蓄电池提供电力给前驱制动电机和步行制动电机,使前驱和步行机构运行起来。此过程中前轮转速低,防止前轮继续下陷;后驱制动电机不通电,处于制动中,则后轮处于制动状态;步行机构运动,借助后轮与地面的附着力,给箱体提供水平推力,通过前轮支架,将推力传给前轮。利用前轮低速转动与沙坑的附着力和步行机构的水平推力,已达到前轮脱陷目的。其功能实现如表1所示。

表1 轮步复合式移动工作状态表(前轮脱困)
5 结束语
移动机器人在执行沙漠探测与救援、外星球探测等方面的工作时,经常会遇到移动机构陷于沙坑无法移动的问题,轮步复合式移动机器人是一种极具研究价值和应用前景的松软沙土地面移动机器人,在未来的沙漠探测与救援、外星球探测等方面将扮演越来越重要的角色。
