水压人工肌肉驱动喷水矢量推进系统设计与试验
2022-12-23刘艳飞张增猛贾云瑞弓永军
刘艳飞, 张增猛, 杨 勇, 贾云瑞, 弓永军
(大连海事大学船舶与海洋工程学院, 辽宁大连 116026)
引言
近年来,随着人类对海洋探索的逐渐深入,水下机器人因为其安全性高、操作方便、工作效率高等优点,越来越广泛地应用到海洋资源勘探、沉船打捞、海底调查等领域[1]。传统水下航行器的驱动装置大多为电机、液压缸等,如刘海波等[2]通过液压缸的伸缩来驱动曲柄滑块,将液压缸的直线运动转化为曲柄滑块的旋转运动,带动机器人喷嘴转动,改变喷嘴的射流方向进而实现喷水矢量推进;罗庆生等[3]通过在喷水推进水下机器人的4组推力臂的末端安装2个垂直布置的电机来控制喷水推进装置射流方向。当电机、液压缸等长时间在水下工作时,存在密封和腐蚀等一系列问题难以解决,同时也增加了水下航行器的生产和维修成本[4]。水压人工肌肉作为一种新型绿色环保的驱动装置,其工作介质是水,可与喷水推进装置采用同一动力源,减轻了设备的重量[5-6],具有推重比大、环境兼容性好、控制精度高等优点,适合作为水下机器人的驱动装置[7]。
水压人工肌肉由端部接头、扣压环、橡胶管和编织网组成,工作时人工肌肉内部一端封闭,向肌肉内部橡胶管通入高压水后,橡胶管充压膨胀,在外部编织网的束缚下,肌肉轴向收缩径向膨胀,从而产生相应的输出力和位移完成驱动。MORI等[8]通过试验研究McKibben型水压人工肌肉,制造参数为初始直径40 mm、初始编织角25°的人工肌肉,工作压力达到4 MPa时输出力高达28 kN。在此基础上,张增猛等[9-10]提出高强度水压人工肌肉,并对其静态特性进行试验研究,结果表明制造参数初始直径30 mm、初始编织角35°的水压人工肌肉,工作压力达到4 MPa时输出拉力为14 kN。水压人工肌肉具备承受内部高压力、大拉力负载的高强度性能,为水压人工肌肉驱动机械关节提供了条件;并且水压人工肌肉驱动机械关节在水下机械臂、机械手、可穿戴式康复机器人等领域得到了广泛应用。SUZUMORI等[11]研发利用水压人工肌肉驱动的机械手,每根手指都有一个五连杆关节机构。NIKKHAH等[12]提出了一种基于对抗结构的液压人工肌肉的新型驱动方法,并将其应用于驱动肘关节的二头肌-三头肌配置中。为了研究水压人工肌肉调节关节的驱动性能,车进凯等[13]设计了串并联混合式三自由度水压人工肌肉机械关节,利用一对水压人工肌肉的拮抗作用来实现对关节的驱动。为进行水压人工肌肉驱动喷嘴矢量调节机构设计提供重要参考。
基于水压人工肌肉调节关节转角的驱动方式,本研究采用2对水压人工肌肉相互垂直布置的方式开发了二自由度喷水矢量推进系统,满足喷嘴在水平面和垂直面方向上的角度调节,并进行了喷嘴矢量调节试验和水下自航试验,结果表明,水压人工肌肉驱动喷水矢量推进系统能够满足水下机器人的运动需求,为研发高性能水下智能装备奠定了基础。
1 水压人工肌肉驱动喷嘴矢量调节原理
水压人工肌肉驱动关节单自由度方向转动原理如图1所示,1号、2号水压人工肌肉一端与固定机架连接,另一端通过钢丝绳与转动关节连接。工作时首先调节2根人工肌肉的充水压力,肌肉从原长状态收缩至初始工作状态且1号、2号水压人工肌肉的轴向输出力F1,F2和肌肉当前工作长度均相同。改变1号、2号人工肌肉工作压力,1号肌肉工作压力升高继续收缩,2号肌肉工作压力降低伸长,再次达到稳定状态时偏转机构产生转角θ,且在关节转动过程中1号、2号人工肌肉的驱动力臂恒为偏转机构半径R,肌肉的长度变化量始终满足Δl1=Δl2。

图1 关节单自由度转动原理Fig.1 Principle of single-degree-of-freedom rotation of joints
与水压人工肌肉驱动关节转角不同的是,人工肌肉驱动喷嘴矢量调节机构转动时,2根肌肉的驱动力臂产生变化分别为B1,B2,如图2所示。在初始工作状态下,1号、2号水压人工肌肉的工作长度均为L0;喷嘴矢量调节机构产生转角θ时,2根肌肉的工作长度分别为L1,L2,且喷嘴矢量调节机构在偏转过程中1号、2号人工肌肉产生偏角分别为α1,α2。人工肌肉的力臂长度B1,B2、偏角α1,α2、工作长度L1,L2与喷嘴偏转角度θ的关系如图3所示。
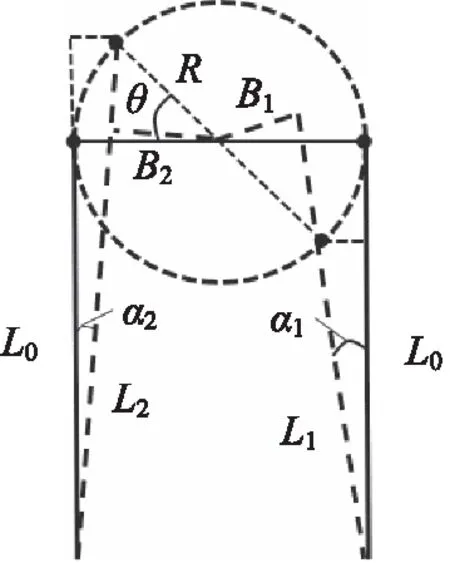
图2 喷嘴矢量机构几何分析Fig.2 Geometric analysis of nozzle vector mechanism

图3 人工肌肉力臂、偏角、工作长度-喷嘴转角关系Fig.3 Relationship between artificial muscle moment arm, declination angle, working length-nozzle rotation angle
存在几何关系:
B1=R·cos(θ+α1)
(1)
B2=R·cos(θ-α2)
(2)
(3)
(4)
(5)
(6)
假定水压人工肌肉在工作部分为理想圆柱体,在工作过程中无任何能量损失,橡胶管无壁厚且纤维不可伸长,理论收缩力表达式[14]为:
(7)
式中,D0—— 水压人工肌肉初始直径
p—— 充水压力
ε—— 水压人工肌肉收缩率
其中,a,b与人工肌肉初始编织角θ0有关,其表达式为:
(8)
(9)
其中,L为水压人工肌肉原长,Li为人工肌肉工作长度。
为研究水压人工肌肉的驱动特性,本研究假定一对水压人工肌肉的结构参数完全相同。2根水压人工肌肉在初始工作状态下,喷嘴转角为0°,1号、2号肌肉的初始条件为充水压力相同、收缩率相同且无外负载,表达式为:
p1=p2=p0,ε1=ε2=ε0
F1(ε1,p1)=F2(ε2,p2)
(10)
式中,p1,p2—— 1号、2号人工肌肉工作压力
ε1,ε2—— 1号、2号人工肌肉收缩率
在控制喷嘴偏转角度时,对称地改变2根水压人工肌肉的工作压力,即输入一个压差值Δp,此时1号、2号人工肌肉的工作压力、收缩率、轴向输出力表达式为:
p11=p0+Δp,p22=p0-Δp
(11)
(12)

(13)
在无任何外负载情况下,喷嘴矢量调节机构始终满足力矩平衡:
F1·B1=F2·B2
(14)
将式(1)~式(6)、式(11)~式(13)带入式(14)中,得到1号、2号水压人工肌肉充水压力差与喷嘴偏转角度的关系式为:
(15)

当1号、2号水压人工肌肉规格参数相同,并且给定人工肌肉初始工作压力、初始收缩率、喷嘴矢量调节机构半径数值时,喷嘴偏转角度与人工肌肉工作压力差存在一一对应关系。在式(13)中,代入取定的喷嘴偏转角度,可得到1号、2号人工肌肉工作压力差。因此在水压人工肌肉驱动喷嘴矢量调节工作过程中,通过调节肌肉充水压力大小改变肌肉压力差,即可实现喷嘴矢量调节。
2 喷水矢量推进系统设计与搭建
喷水矢量推进机器人在执行水下作业任务时,需要满足转向、上升、下潜等运动,因此在1对水压人工肌肉驱动喷嘴在一个自由度上矢量调节的基础上,采用2对相互垂直布置的水压人工肌肉驱动喷嘴二自由度矢量调节。如图4所示,搭建水压人工肌肉驱动喷水矢量推进系统,并将该系统安装在浮体框架上。

1.喷嘴 2.偏转机构 3.水压人工肌肉 4.支撑杆 5.通水阀块 6.撑板 7.浮体框架图4 喷水矢量推进系统三维模型Fig.4 3D model of water jet vector propulsion system
从图4中可知,喷水矢量推进系统采用类似悬臂梁结构设计,由喷嘴、机械偏转机构、支撑杆、水压人工肌肉以及通水阀块等组成。喷嘴通过螺栓与机械偏转机构固定连接,偏转机构的另一侧与水压人工肌肉通过万向节相连,万向节转动角度为90°,能够消除人工肌肉驱动喷嘴偏转时产生的扭矩。在喷水矢量推进系统工作过程中,通水阀块一端通过液压管与泵源相连,给水压人工肌肉供水,使得肌肉充压收缩,带动偏转机构转动。水压人工肌肉充水压力不同,其收缩量也不同,因此改变水压人工肌肉的充水压力,即可实现喷嘴矢量调节。
搭建水压人工肌肉驱动喷水矢量推进系统试验台,如图5所示,该试验台包括安装平台、数据采集系统。安装平台即为浮体框架;数据采集系统包括三轴倾角传感器、拉线位移传感器、压力变送器以及负责实时定位的激光雷达传感器,分别采集喷嘴偏转角度、水压人工肌肉的位移、充水压力和喷水矢量推进系统在水中的坐标,传感器性能参数如表1所示。三轴倾角传感器与喷嘴固连,并需要进行环境校准,以消除磁场干扰带来的测量误差。拉线位移传感器通过螺钉安装在通水阀块前端的安装板上。
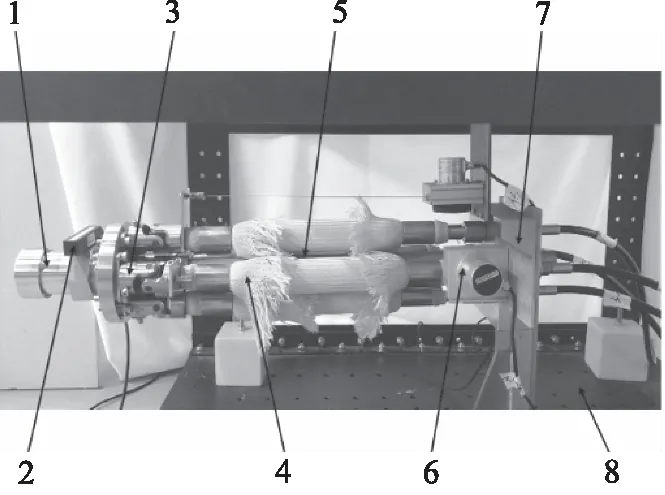
1.喷嘴 2.三轴倾角传感器 3.机械偏转机构 4.水压人工肌肉 5.支撑杆 6.拉线位移传感器 7.通水阀块 8.浮体框架图5 喷水矢量推进系统试验台Fig.5 Water jet vector propulsion system test bench

表1 传感器性能参数Tab.1 Sensor performance parameters
以Danfoss高压海水泵为喷水矢量推进系统动力源,基于液压系统B型半桥原理搭建水压人工肌肉驱动喷水矢量推进液压系统回路,如图5所示。每根水压人工肌肉控制支路都是一个基于B型半桥的液压回路,系统输入管路中的液阻7视为固定液阻,比例节流阀8为可变液阻,从液阻7和比例节流阀8中间输出B型半桥的控制信号,实现水压人工肌肉的充水压力调节。在喷嘴偏转角度矢量调节过程中,通过改变先导输入电压控制信号的大小来控制比例节流阀的阀口开度大小,从而改变水压人工肌肉的充水压力,实现喷嘴偏角的矢量调节。

1.水箱 2.过滤器 3.水压泵 4.电机 5.溢流阀 6.单向阀 7.液阻 8.比例节流阀 9.水压人工肌肉 10.机械偏转机构图6 喷嘴矢量调节液压系统原理图
水压人工肌肉驱动喷水矢量推进控制系统如图7所示,包括PC机、NI采集卡、24 V直流电源。PC作为上位机,控制NI采集卡输出频率为0.5 Hz的电压脉冲信号,控制水压人工肌肉的充水压力大小;使用LabVIEW软件在上位机中采集喷嘴偏转角度、水压人工肌肉的位移、充水压力和喷嘴矢量调节系统的实时坐标数据,采集周期为0.01 s;24 V直流电源用于给采集卡供电。
3 喷嘴偏角矢量调节试验与分析
根据水压人工肌肉定收缩量试验,原长为300 mm、直径为30 mm、初始编织角为30°的水压人工肌肉的收缩率范围为0~0.3,因此取人工肌肉初始收缩率为0.15,此时人工肌肉初始长度L0为255 mm。从图1机械偏转机构工作原理可知,偏转机构由初始位置开始转动的最大位移量应为人工肌肉最大收缩量的一半,原长300 mm的人工肌肉最大收缩长度为80 mm,因此假定喷嘴偏转角度为±60°时,由s=πR/3=40 mm 计算得到偏转机构半径为38.2 mm,考虑到水压人工肌肉的最大收缩直径为58.13 mm以及人工肌肉与偏转机构连接件的尺寸,取偏转机构半径R为50 mm。当取水压人工肌肉初始压力p0为1 MPa时,根据式(15)计算得到水压人工肌肉充水压力与喷嘴偏角的关系如图8所示。

图7 喷水矢量推进控制系统Fig.7 Water jet vector propulsion control system

图8 水压人工肌肉充水压力与喷嘴偏角关系曲线Fig.8 Relationship between water pressure of artificial muscle and nozzle declination angle
从图8中可以看出,水压人工肌肉的充水压力以及压力差,与喷嘴偏转角度存在对应关系。当喷嘴偏转角度为10°,20°,30°,40°,50°,60°时,水压人工肌肉压差分别为0.310, 0.614, 0.898, 1.158, 1.386,1.584 MPa。如图9所示,按顺时针方向将水压人工肌肉标记为1号、2号、3号、4号。在喷嘴偏角矢量调节试验过程中,保持1号、3号人工肌肉充水压力不变,通过改变2号、4号人工肌肉充水压力调节喷嘴偏转角度。根据图7水压人工肌肉充水压力与喷嘴偏角曲线,确定在试验过程中调节1~4号水压人工肌肉的充水压力,如表2所示。

图9 水压人工肌肉标记Fig.9 Hydraulic artificial muscle marking

表2 水压人工肌肉充水压力Tab.2 Hydraulic artificial muscle water filling pressure
如图10所示,将水压人工肌肉驱动喷嘴偏角矢量调节试验结果与喷嘴理论偏转角度进行对比分析,两者偏转角度的平均偏差为10.8%,这是因为在机械偏转机构设计中,采用万向节代替钢丝绳作为水压人工肌肉与偏转机构的连接件,万向节只能承受转矩,而不能承受拉力、压力。因此为了提高万向节的承力性能,在万向节上采用螺钉紧固,在机械偏转机构转动的过程中,螺钉与其他万向节会发生挤压碰撞,改变喷嘴的实际偏转角度。另外,因为水压人工肌肉具有收缩量越大其输出力就越小的特性,当一对对抗型水压人工肌肉均接近最大收缩位置时,相对伸长的人工肌肉输出力大,相对收缩的人工肌肉输出力小,因此机械偏转机构不能达到理想的收缩位置。在喷嘴偏角矢量调节试验中,当两根对抗型水压人工肌肉压差为1.584 MPa时,喷嘴实际偏转角度为56.88°,达不到喷嘴理想偏转角度60°。
4 水池试验与分析
在喷嘴偏转角度矢量调节试验的基础上,通过联调喷水推进系统和水压人工肌肉驱动喷嘴偏角矢量调节系统,进行了喷水矢量推进系统水池试验。开启高压水泵给喷嘴矢量调节液压系统和喷嘴供水,在上位机中输出幅值为±6 V、周期为20 s的三角波控制信号,调节水压人工肌肉的充水压力,实现喷嘴在-30°~30° 范围内来回偏转,输出控制信号如图11所示。在喷嘴矢量调节机构水池航行过程中,安装在浮体框架上的激光雷达传感器能够实时记录框架的运动轨迹,水池航行试验现场如图12所示。
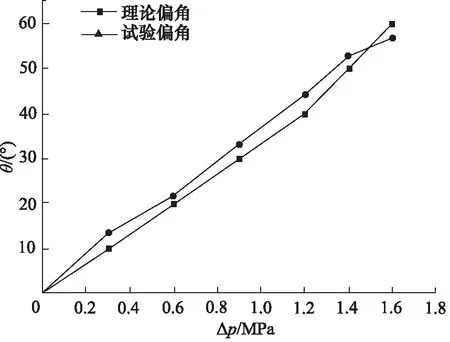
图10 人工肌肉充水压力差与喷嘴偏转角度关系Fig.10 Relationship between artificial muscle water filling pressure difference and nozzle deflection angle

图11 三角波控制信号Fig.11 Triangle wave control signal
喷嘴实际偏转角度与上位机输出三角波控制信号的关系如图13所示,此时定义在水平面方向上喷嘴向右偏转为正,向左偏转为负,从图中可以看出,水压人工肌肉驱动喷水矢量推进系统在淹没情况下,改变人工肌肉的充水压力,能够实现喷嘴偏转角度的矢量调节。在XY平面内描绘水池航行试验轨迹,如图14所示。喷水矢量推进系统在水池航行试验的过程中, 调节喷嘴偏转角度,能够使搭载了喷水矢量推进系统的浮体框架以类似S形曲线运动。

图12 水池航行试验现场图Fig.12 Site map of tank sailing test
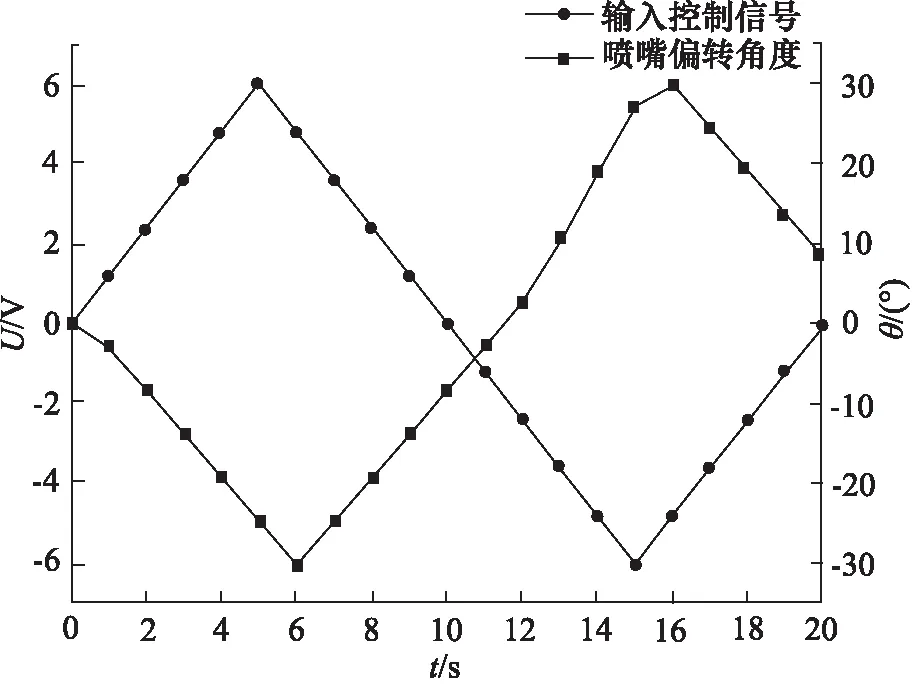
图13 时间-控制信号、喷嘴偏转角度关系Fig.13 Relationship between time-control signal and nozzle deflection angle

图14 水池航行试验轨迹Fig.14 Track of pool navigation test
5 结论
本研究使用水压人工肌肉取代电机、液压缸等作为喷水矢量推进器的驱动装置,开发了一种水压人工肌肉驱动喷水矢量推进系统,对系统中喷嘴偏转机构进行了设计计算,进行了水压人工肌肉驱动喷嘴偏角矢量调节试验以及水池航行试验。根据理论计算和试验结果,得出以下结论:
(1) 基于喷嘴偏转机构设计计算,确定了水压人工肌肉充水压差与喷嘴偏转角度之间的对应关系,即当一对水压人工肌肉压差分别为0.310,0.614,0.898,1.158,1.386,1.584 MPa时,喷嘴偏转角度分别约为10°,20°,30°,40°,50°,60°;
(2) 在喷嘴偏转角度矢量调节试验中,调节人工肌肉压差为0.310,0.614,0.898,1.158,1.386,1.584 MPa时,喷嘴实际偏转角度为13.56°,21.66°,33.24°,44.21°,52.80°,56.88°,试验结果与理论计算结果平均偏差为10.8%,表明以水压人工肌肉作为驱动器能够满足喷嘴偏角矢量调节的要求;
(3) 水池试验表明,水压人工肌肉驱动的喷水矢量推进系统能够改变机器人在水中的运动方向,满足矢量调节的基本要求。
