“四步法”机器人引导经皮三叉神经半月节球囊压迫术
2022-12-20陈素华林国中韩芸峰马长城
司 雨 吴 超 陈素华 林国中 韩芸峰 杨 军 马长城
(北京大学第三医院神经外科,北京 100191)
经皮三叉神经半月节球囊压迫术可以应用于各式手术后复发、高龄不耐受开颅手术、无责任血管压迫等类型三叉神经痛的治疗[1]。球囊压迫术的效果依赖精确穿刺和置管于Meckel囊内,对囊内的三叉神经半月节进行充分的压迫。常规C臂机引导下穿刺盲目性大,验证指标单一,常出现穿刺位置错误,导致术后疗效不佳。机器人导航手术的出现使得精确定位、穿刺和置入导管成为可能[2]。但是机器人导航手术路径设计繁琐,既要穿刺入Meckel囊,又要避开穿刺路径上的不规则骨质。2020年6月~2021年11月,我们采用“四步法”行机器人引导经皮三叉神经半月节球囊压迫术治疗三叉神经痛20例,效果满意,现回顾性分析,探讨标准化操作流程。
1 临床资料与方法
1.1 一般资料
本组20例,男6例,女14例。年龄37~81(62.5±13.7)岁。中位病程39(1~192)个月。左侧疼痛11例,右侧疼痛9例。三叉神经V1支分布区域疼痛2例,V2支分布区域疼痛3例,V3支分布区域疼痛5例,V1+V2分布区域疼痛1例,V2+V3分布区域疼痛7例,V1+V2+V3分布区域疼痛2例。术前疼痛视觉模拟评分(Visual Analogue Scale,VAS)(0分表示无痛,10分代表难以忍受的最剧烈的疼痛)10分1例,9分8例,8分10例,7分1例,中位数8分。查体未见明显神经系统定位体征,辅助检查排除颅内占位、炎症等导致的继发性三叉神经痛。6例既往未接受过治疗;14例有微血管减压(12例)、半月节射频(3例)、三叉神经外周支射频(5例)或γ刀(1例)治疗史,其中7例接受过2种方法治疗,最后治疗距离此次入院时间6~17(11.4±3.4)月。
纳入标准:诊断为原发性三叉神经痛,拒绝行开颅微血管减压术。
排除标准:存在凝血障碍,不能耐受全麻。
1.2 影像学设备、扫描序列和参数
头面部CT使用德国西门子SOMATOM Emotion 64排螺旋CT。采用分段无缝扫描,扫描范围上段部分至颅顶,下段部分至下颌体下方,连续无重叠。头颅部分扫描参数130 kV、220 mAs,准直器宽度16 mm×1.5 mm,扫描野(SFOV)230 mm,序列扫描;重建层厚0.75 mm,层间隔1 mm,视野(FOV)230 mm。
颅脑MRI使用美国GE 1.5T Signa HD磁共振仪,8通道头颅相控阵列线圈。采用三维稳态进动快速成像序列(3D-FIESTA序列)。扫描范围从大脑脚至延髓(包含脑桥),扫描方向为头足方向。重复时间(TR)4.6 ms,回波时间(TE)1.6 ms,反转角60°,FOV=16 cm×16 cm。矩阵256×256,层厚0.8 mm,层距32 mm。平均次数(NEX)6。
1.3 穿刺针、压迫球囊和手术机器人型号
手术穿刺针和压迫球囊为深圳市擎源医疗科技有限公司一次性脑科手术用球囊导管套件QK-08S50(粤械注准20172030320)。华科精准(北京)医疗科技有限公司神经外科手术机器人SR1(国械注准20183010598)。
1.4 操作流程
入院后行颅底薄层MRI 3D-FIESTA序列扫描,手术当天局麻下头部放置颅骨标记钉,行头面部CT扫描。拷贝颅底MRI和头面部CT的原始DICOM文件,导入手术机器人进行MRI和CT图像融合。通过针道视角,神经外科手术机器人可以以穿刺路径上的某一点为中心,在3个互相垂直的平面上显示立体的解剖结构。
以标准化的“四步法”操作流程实施术前规划和手术:①在三维图像上初步定位;②在CT矢状位和冠状位图像上确定穿刺方向;③在MRI图像上微调穿刺路径和Meckel囊的关系;④低阻力穿刺。具体见下。
①选择显示纯CT图像,根据轴位(图1A)和冠状位(图1B)的大脑镰调整图像为标准的轴位和冠状位。点击三维图像中卵圆孔的枕骨一侧(图1C),可以很清晰地在轴位图像中寻找患侧卵圆孔(图1D,箭头)。②在冠状位上调整代表矢状位的长轴(蓝线)和卵圆孔长轴平行(图2A),在此时的矢状位像上,定义前下方骨质的下缘为入点,后上方骨质的上缘为靶点(图2B)。③选择显示纯MRI图像,可在矢状位(图3A)和冠状位(图3B)上清晰显示Meckel囊(红色椭圆形),结合轴位、矢状位和冠状位3个平面,微调穿刺方向经过Meckel囊,同时避开颞叶(图3C,蓝色线条为颞叶硬脑膜)。返回纯CT图像,验证穿刺路径上没有骨性结构。最终穿刺路径和皮肤的交点即为实际穿刺入点(图4A,箭头)。MRI图像提示穿刺路径刺入Meckel囊(图4B,箭头),穿刺入点为口角外2.6 cm(图4C),和经验靶点(口角外2.5 cm)差距不大。④全身麻醉,标准仰卧位,使用Myfield头架固定头部,并与机器人相连。利用机器人机械臂末端的注册棒尖端点触头部标记点,标记点的空间位置通过机械臂内置的空间位置光电编码器采集卡识别完成,机器人自动进行患者头颅空间位置和术前影像学资料的匹配。标记点验证通过后,常规消毒铺巾,更换机械臂末端的注册棒为三叉神经穿刺套筒,并进入穿刺工作位置。机械臂工作位置的轴向和规划轨迹完全重合。先用20 ml注射器针头刺破皮肤,在低阻力情况下,旋转置入穿刺针,接近靶点过程中有一次明显的突破感,即为穿刺进入卵圆孔。此时会出现三叉神经反射(血压升高、心率减慢)。麻醉医师配合静脉降压,目标为收缩压<140 mm Hg;同时使用阿托品提升心率,目标为心率>60次/min。穿刺针达到目标靶点后,C臂机(头颅侧位)验证无误(图5A),拔出内芯,置入球囊导管。在机器人导航界面上测量靶点与三叉神经跨越岩骨点的距离,该距离为穿刺导管需要自导管第2个指示点进一步深入的距离,多在球囊导管第2个和第3个指示点间。该过程中有第二次突破感,即为穿刺进入Meckel囊。导管穿刺到位后,再次C臂机验证(图5B),如无误,缓慢注射0.3 ml碘海醇液体,第3次C臂机验证,观察球囊形态(图5C),如无误,继续充盈球囊至0.7 ml,压迫1 min,先后撤除球囊导管和穿刺针。局部覆盖无菌辅料。
记录穿刺前心率、收缩压(袖带测量),穿刺过程中的最低心率、最高收缩压,计算术中心率波动(%)=(穿刺前心率-穿刺过程中的最低心率)/穿刺前心率,术中血压波动(%)=(穿刺过程中的最高收缩压-穿刺前收缩压)/穿刺前收缩压。记录术中C臂机照射次数和球囊形态。记录术后清醒后即刻VAS评分和术后并发症(包括面部麻木、舌体感觉障碍、咀嚼肌肌力下降、角膜反射减退、口角疱疹等)。
2 结果
20例术中C臂机照射3次5例,4次10例,5次5例。侧位片球囊均呈现典型“梨形”形态(提示压迫位置正确[3])(图5C)。术中血压波动范围2%~45%,中位数18%;心率波动范围6%~53%,中位数21%。术后即刻疼痛症状均缓解,VAS评分0分17例,1分3例。术后20例均出现术侧面部麻木,术侧一半舌体深浅感觉障碍,15例术侧咀嚼肌肌力下降,1例术侧角膜反射减退,3例术侧口角疱疹。术后随访3~23(10.7±5.1)月,VAS评分均为0分,无三叉神经痛复发。2例残留面部轻微麻木,余18例术后面部麻木、舌体感觉障碍、咀嚼肌无力、角膜反射减退和口角疱疹均消失。
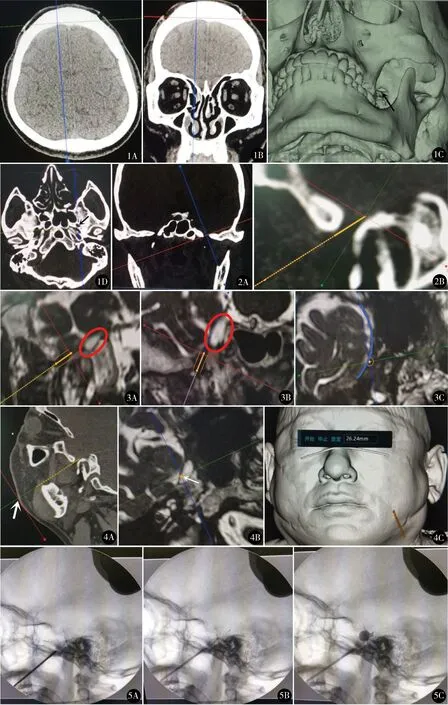
图1 根据CT轴位和冠状位大脑镰调整图像为标准的轴位和冠状位图像,通过三维图像寻找二维图像上的卵圆孔(箭头) 图2 调整矢状位的长轴(蓝线)和卵圆孔长轴平行,然后在矢状位定义穿刺角度图3 设计穿刺路径进入Meckel囊(红色椭圆内),并避开颞叶(蓝色线条为颞叶硬脑膜) 图4 确定体表穿刺点(图A箭头),MRI图像验证穿刺进入Meckel囊,并确认体表穿刺点和口角距离 图5 术中先后验证穿刺针位置(A)、导管(B)和扩张后球囊(C)位置和形态,球囊呈典型的“梨形”形态
3 讨论
目前治疗三叉神经痛的主流手术方式有3种[4~6]:开颅微血管减压术、三叉神经半月节射频消融术和球囊压迫术。开颅微血管减压术创伤大,术后恢复期长;三叉神经半月节射频消融术需要患者在局麻下配合操作,术中疼痛剧烈;球囊压迫术可选择全麻下操作,术中无不适感觉,术后恢复也较开颅微血管减压术快,所以得到越来越多医生和患者的青睐[7,8]。传统C臂机引导经皮穿刺盲目性大[9],更多依赖于术者的经验,成长周期长;术中需要反复调整穿刺角度和深度,出血率高[10],增加穿刺损伤;穿刺位置错误、X线球囊成形不佳率高。在可视化的基础上量化穿刺过程,可以提高安全性和有效性。近年神经外科手术机器人的飞速发展为此提供满意的、可复制推广的解决方案。
经皮穿刺三叉神经半月节球囊压迫术有2个技术要点,一个是穿刺入卵圆孔,另一个是将球囊导管置入Meckel囊中。传统徒手穿刺主要依靠C臂机X线侧位照射影像,对卵圆孔和Meckel囊均无法直接显示。卵圆孔主要依靠岩骨尖部和穿刺突破感来判断,精确度差,Li等[11]报道5例常规C臂机引导三叉神经球囊压迫术罕见的血管并发症,其中2例因定位错误,穿刺入扩大的棘孔,损伤脑膜中动脉,引起颅内硬膜外血肿;3例在穿刺过程中损伤颈内动脉,导致颈内动脉海绵窦瘘。张章等[12]采用CT动态定位,弥补C臂机的缺陷,但患者和医务人员受到的辐射剂量大幅度增加,并且CT定位仅能显示骨性的卵圆孔结构,对Meckel囊无法显示,仍不能满足穿刺的全过程,而这第二步又是最为关键的,直接决定球囊是否能直接而充分地压迫Meckel囊内的三叉神经半月节[13]。神经外科手术机器人解决了这个问题。机器人的软件可以将CT和MRI图像进行融合,先在CT图像下定位卵圆孔,再在MRI图像上定位Meckel囊;还可以精确测量卵圆孔与Meckel囊远端的距离,指引球囊导管置入的深度。可以精确穿刺、精确置管,达到个体化操作。本组20例球囊在X线侧位像上均出现典型的“梨形”图像,表明机器人引导下经皮穿刺三叉神经半月节球囊压迫术精确度高。
除了提高穿刺的精确度,机器人引导下穿刺还能固定穿刺通道。常规穿刺可以转变为旋转刺入的方式,轻柔前进,遇到落空感后,向前惯性运动距离短。Wang等[14]报道256例常规C臂机引导下三叉神经球囊压迫术,术中收缩压平均波动50%,心率平均波动30.1%。均较本组的18%、21%高。术中C臂机透视的作用可退化为单纯验证,机器人操作熟练后,术中X线照射3~4次即可。但是机器人引导下穿刺并不能降低术后并发症的发生率,术后并发症与术中球囊压力和压迫时间有关。Lobato等[15]的研究表明球囊压力低于600 mm Hg得不到预期治疗效果。Brown等[16]的回顾性研究显示56例球囊压力750~1250 mm Hg,压迫持续1.5 min,92%的患者术后疼痛即刻缓解。目前对球囊压力如何量化和个体化尚不明确。我们球囊内注射1 ml液体压迫1 min,术后疼痛均缓解,但均出现术侧面部麻木、术侧一半舌体深浅感觉障碍,平均随访11个月,随着神经的修复,仅2例仍残留面部轻微麻木,其余18例术后并发症均消失。
机器人引导下经皮三叉神经半月节球囊压迫术也存在一些固有的缺点,如机器人设备购置费用高,术前需导入影像学资料,并进行路径规划,增加了实施的复杂性。
综上,机器人引导下经皮三叉神经半月节球囊压迫术临床操作精确度高,术中生命体征波动小,术后疗效满意。
