高湍流低风速下风电机组主动减载控制策略研究
2022-12-17冀宵玉李岩孙琦刘公铄
冀宵玉,李岩,孙琦,刘公铄
(南京理工大学 能源与动力工程学院,江苏 南京 210094)
0 引 言
为增强电力系统运行可靠性,提高电能质量,使风电机组协助电网进行频率调整势在必行[1]。然而,为使收益最大化,风电场通常会控制风电机组运行在最大功率点(maximum power point tracking ,MPPT),这也导致了当电网频率降低时,风电机组没有能力提供额外的有功输出以参与电网调频。因此,使风电机组具备一定的备用功率的风电机组主动减载运行策略的研究俨然成为新能源电网效益与稳定问题的研究焦点。我国西部地区风力资源开发已趋于饱和,加上西电东送会造成较大的电能损耗,风电行业开始向东部沿海地区发展。相对于高风速低湍流的西部地区,东部地区的风能资源存在低速高湍流的特点,因此,对于风机的稳定的运行提出了更严峻的挑战。
目前国内外专家提出的对风电机组的减载控制方法主要分为三类:一是超速控制减载运行策略,即利用超速使风电机组脱离最大功率点,通过将有功输出存储为转子动能的方式达到减载目的[2-3];二是变桨控制减载运行策略,即通过增加桨距角以减少风能利用率,完成减载[4];三是超速控制与桨距角控制相结合的减载运行策略[5]。其中主流减载策略为优先超速后续变桨的控制方式,即先在额定转速以下使转子超速达到减载的目的,转子转速达到额定转速后继续通过增大桨距角的方式降低输出功率。该方法充分利用了超速减载控制快速性的特点,辅以变桨减载,实现全风速段的减载。
以上主动减载控制策略对于西部较为平稳的风速可以较好地完成对风电机组的减载。但面对东部地区湍流强度较大的风速,由于超速控制风速段的局限性,减载后风电机组仅靠变桨控制无法适应湍流风速。为了提高风电机组减载运行时的风速跟随性,结合超速减载的快速响应性和变桨减载的全风速适应性,对现有超速优先的转速和桨距角的协调减载控制策略进行优化,提出适用于湍流风速的超调桨距角和转速协调主动减载控制策略。在现有减载策略的基础上,通过协调增大桨距角控制和减小转速控制将转速保持在低于额定转速的稳定运行点,预留转速区间,稳定后通过转速变化来响应小范围的风速波动,通过桨距角变化来响应大范围的风速波动。最后,通过仿真验证该策略的可行性。
1 超调桨距角的主动减载控制策略
为了解决超速变桨协调控制减载在对中风速区风电机组减载运行后无法适应湍流风速的问题,提出通过超调桨距角的方法,将风机减载后的转子转速保持在额定转速以下,对现有的超速变桨协调控制减载的控制策略进行改进。风电机组在用该策略减载后,可以较好地适应湍流风速,对于小的风速波动,仅靠转子转速即可响应其变化,对于较大的风速波动,则执行变桨机构进行响应。
现有风电机组主动减载控制策略的桨距角β1可推导得出:

(1)
式中:d%为减载比;Cp,max为该风速下的最大风能转化系数;ωn为风电机组的额定转速;v为风速;R为风轮半径。
此时风电机组的转速达到了额定风速,转速无法再随着风速的增大而增大,仅依靠桨距角的变化来响应风速的变化,但桨距角面对湍流风速无法较好地响应风速的变化。
为了适应中风速区的湍流风速,本文考虑根据湍流强度给定一个小于额定转速ωn的转速ωb,使减载后的风电机组初始运行在该转速,这样面对小幅度的风速变化即可通过转速来响应。
改进后的桨距角β2可由式(2)求得。
(1-d%)Cp,max=
(2)
式中:d%为减载比;Cp,max为该风速下的最大风能转化系数;ωb为设定转速;v为风速;R为风轮半径。
此时求得的桨距角β2相对于额定转速时的桨距角β1会更大,但输出的有功功率相同。
图1为超速和变桨协调控制减载原理图,减载前风电机组运行于最大功率点A点,此时转速为最佳转速,桨距角为0°。减载时通过超速控制使机组增大转子转速使其运行于额定转速B点,但此时无法满足d%的减载要求,需要继续对风电机组进行减载控制,此时只能增加桨距角到β1,即运行点由B点运行到C点,从而满足减载要求。但此时面对湍流强度较高的风速,减载后由于风电机组的转速已经达到了额定转速,无法发挥其风速跟踪性,仅能依靠桨距角来跟随风速的变化。为了发挥转子转速的风速跟踪快速性,考虑将桨距角增加到β2,将风轮转速降为ωb,即使机组运行于D点,此时也同样满足了减载要求,并且预留了转速区间[ωb,ωn],在该转速区间风电机组可以仅依靠转速来适应风速的变化,当转速上限无法满足风速的变化时,再通过桨距角来响应风速变化。

图1 超速和变桨协调控制区主动减载原理图
2 仿真验证
2.1 仿真条件
为验证提出的风电机组改进转速与桨距角的主动减载协调控制策略的可行性及有效性,在MATLAB/Simulink环境下对湍流风速下的风电机组主动减载模型进行仿真验证[6-9]。
风电机组建模采用当前风电市场的主流机型,1.5 MW的双馈异步风电机组(doubly fed induction generator,DFIG)模型。风电机组参数设置如下:风机额定功率为1.5 MW,额定风速为12 m/s,最大风能利用系数Cp= 0.48,最佳叶尖速比λ=8.1,最大桨距角变化率为2 deg/s。
湍流风速仿真采用组合风速法,相较于其他风速模拟方法,组合风速得到的模拟风速能够较精确地反映风速的实际突变性、渐变性及随机性等特点,能更好地验证所提出减载控制方法的可行性[10]。湍流风速如图2所示,组合风速由四种风(基本风、阵风、渐进风、随机风)的分量组合而成,其中基本风风速为11 m/s,阵风峰值为0.5 m/s,渐进风中阶跃风峰值为0.5 m/s,随机风的方差为2,间隔时间为0.25 s。

图2 模拟湍流风速
2.2 结果分析
对湍流风速下提出的改进减载策略与常规减载策略的动态减载效果进行仿真验证。风电机组在t=20 s时在MPPT模式下稳态运行。设在t=50 s时系统突然发生减载20%。得到仿真系统中双馈风电机组有功功率、转子转速与桨距角随时间变化追踪趋势,分别如图3~图5所示。以仿真时间为界,可将仿真试验分为三个阶段:一阶段是t=20~50 s(简称为稳态过程1),此时电力系统处于风电机组减载之前的稳态运行时期,双馈风电机组运行于MPPT模式;二阶段是t=50~60 s(简称为暂态过程),由于机组切换为减载系数为20%的主动减载运行模式,系统开始进入减载运行暂态过渡过程,风电机组的有功出力与转子转速和桨距角急速变化调整;三阶段是t=60 s后(简称为稳态过程2),此时系统变化暂态过程结束,系统趋于稳定,进入第二个稳态过程。
三种运行模式的风电机组有功功率对比图如图3所示,在稳态过程1中,由于系统处于湍流风速下,系统风速不断变化导致风机转速也相应变化,双馈风机有功出力在最大有功功率1.12 MW附近波动;暂态过程中,提出的改进减载策略与常规减载策略控制风电机组的有功出力根据减载20%条件变化调整,有功出力急剧减小;改进减载策略与常规减载策略下双馈风电机组的输出有功功率均保持在0.9 MW左右,为MPPT模式下的80%,达到了减载20%目标,即两种减载策略均稳定实现了双馈风机减载指令。
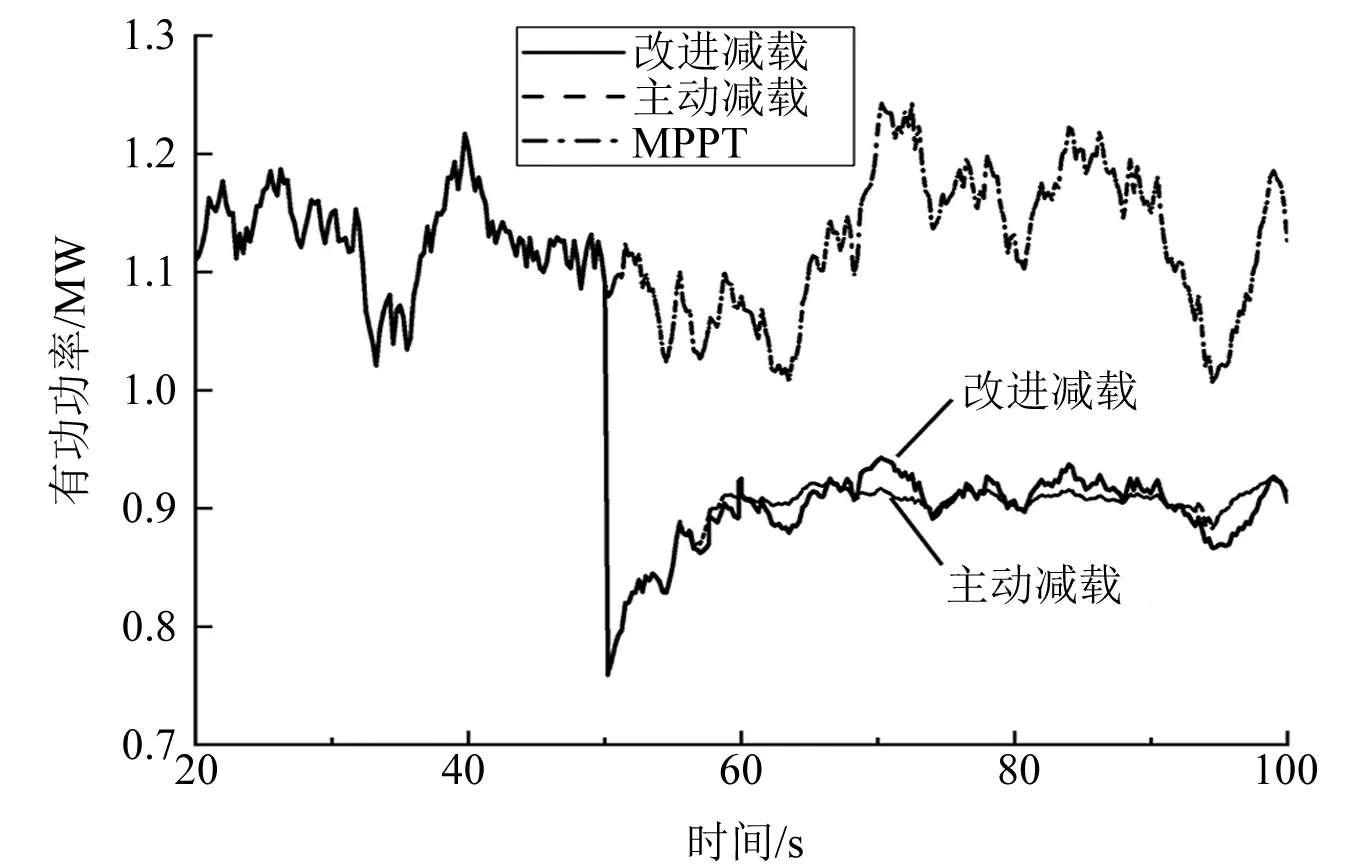
图3 有功功率对比
图4为三种运行模式下的转子转速对比图。在稳态过程1中,即使处于湍流风况状态,MPPT控制模式亦使双馈风机的转速在该风速的最佳转速1.12 pu上下波动。改进前的常规减载策略控制下的双馈风机运行在最大转速1.2 pu处,长期处于最大转速使得风机产生较大机械磨损,不利于风机的长期稳定运行。而提出的改进减载策略控制下的双馈风机转速的保持却在安全裕度内的1.18 pu处转动速度,有更好的安全性、稳定性与经济性。
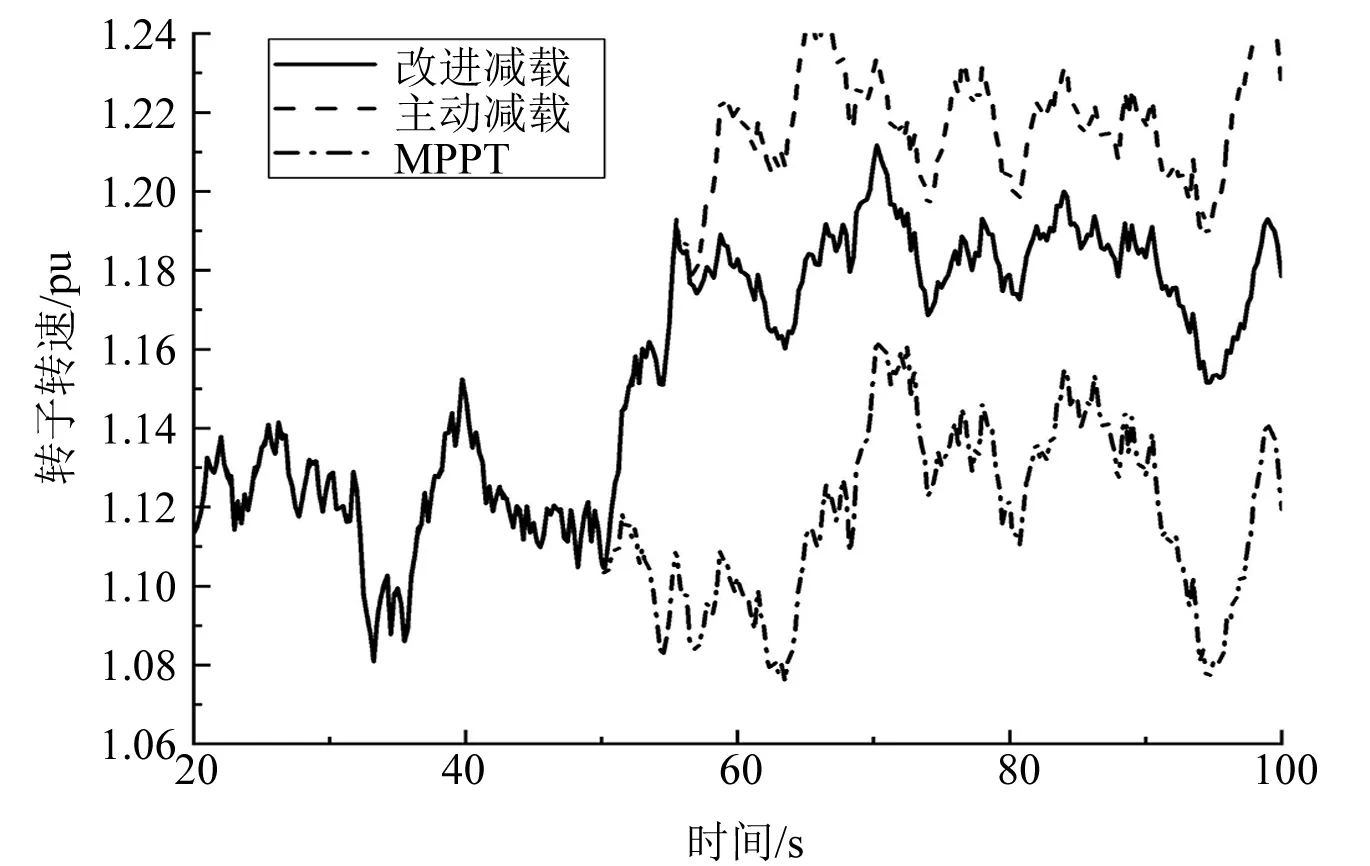
图4 转子转速对比
如图5所示,在稳态过程1中,由于未达到转速上限,双馈风机桨距角始终为0。改进前的常规减载策略控制下的双馈风机的桨距角在0~9°之间剧烈变化。由于桨距角的响应速度较慢,此种情况下风机无法较好地跟踪风速的变化。但是提出的改进减载策略控制下的双馈风机桨距角在3.5~9°之间变化,较小的桨距角变化范围使转子转速能更好地响应风速的变化,有更好的灵敏性。明显减少的桨距角变化频率也对减小风电机组的机械损耗有着良好抑制作用。
仿真结果表明,提出的改进转速与桨距角的协调控制策略相较于常规变桨变速协调控制策略,提升了风电机组在湍流风速下减载运行的稳定性,其风速跟踪速度显著提高,变桨动作和变桨频率显著降低,表现出更高的灵敏性与经济性,改善了风电机组参与电网的频率调节的能力。
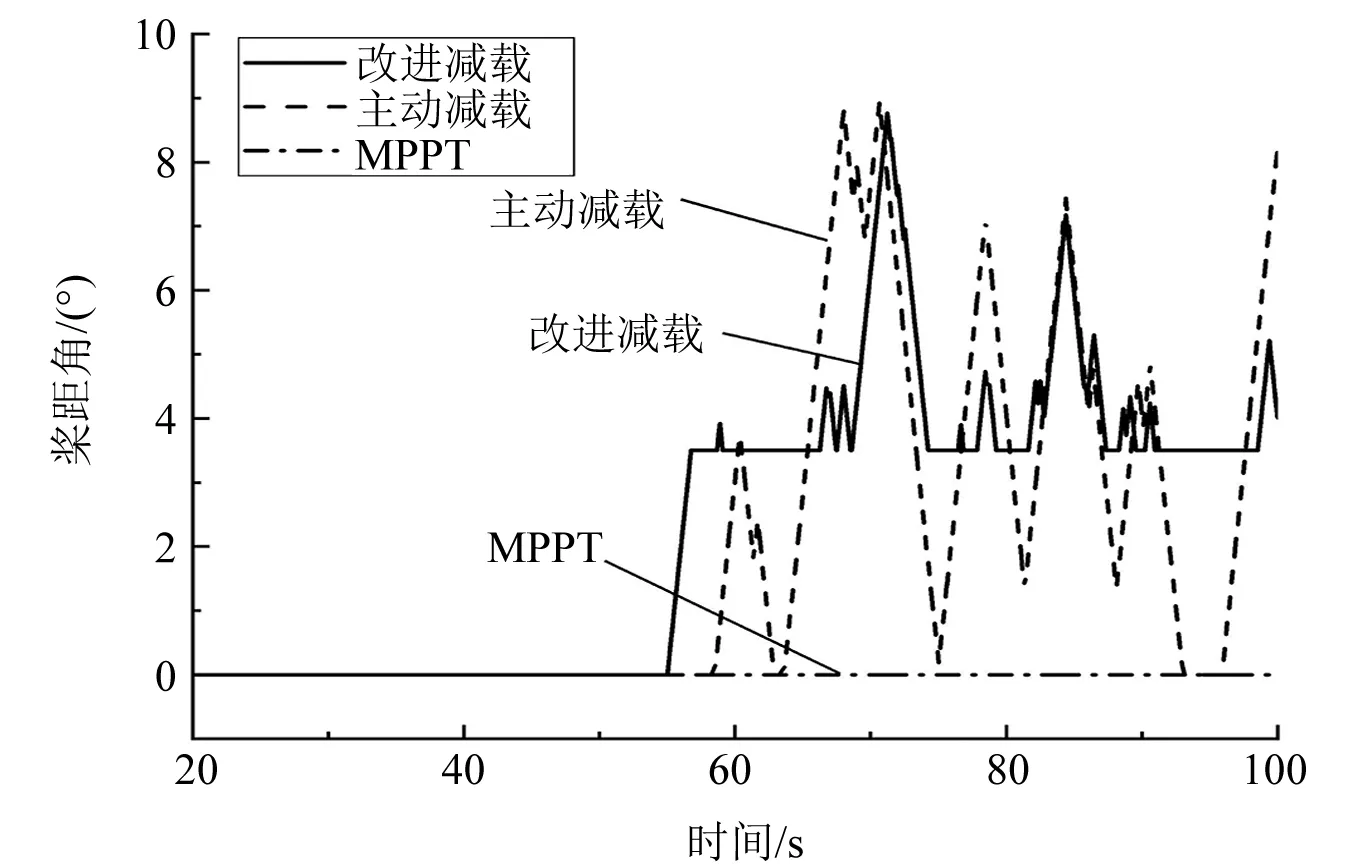
图5 桨距角对比
3 结束语
本文提出了超调桨距角的超速变桨协调控制策略,实现风电机组在沿海地区高湍流风速下的减载运行。现有减载策略在中风速段风电机组达到额定转速,仅靠变桨无法及时响应高湍流风速,不利于稳定运行且增大机械磨损,使用该控制策略可有效解决上述问题。最后通过仿真表明,该控制策略在实现减载的基础上,可有效增大风速跟踪效果,减小机械磨损。为后续风电机组利用减载后的备用功率参与电网调频,保障电网频率稳定性做好基础。
