弱惯量支撑电网自适应频率保护策略研究
2022-12-17常亚超杨德友
常亚超, 杨德友
(东北电力大学 电气工程学院,吉林 吉林 132012)
0 引 言
电网中风电的占比逐步增加,改变了系统的动态行为[1-3]。系统调频愈加困难,频率稳定问题也愈加明显[4]。作为电网稳定运行的重要措施,低频减载在防止大停电事故方面发挥了重要作用[5]。
目前,大部分减载方案主要针对传统电网,但传统方案对含高比例风电的系统适应性较差。文献[6]阐述了风电接入电网时对频率特性产生的影响,但未优化低频减载方案本身。风机并网导致了系统惯量的下降,当系统故障时系统频率就会快速下降。因此更加要求系统能够快速且准确地切除负荷,切除太慢会使系统在频率恢复过程中的最低频率更低。过低的频率会触发风机的低频保护,使风机被迫切出电网。这就造成了更大的功率缺额,频率进一步的下降,最终可能造成系统的崩溃。因此本文设计方案具有快速性与准确性的特点,可以快速且准确地切除负荷,提高了系统稳定性。
1 功率缺额的计算
有功缺额主要包括两部分:① 正常运行发电机增发的一部分;②另一部分由负荷自身调节所承担。即:
(1)
式中:ΔP为系统总的有功缺额;ΔPg,i为第i台发电机故障后增发有功功率;ΔPL,i为第i个负荷节点变化的有功功率;Ωg为运行的发电机组集合;ΩL为各种负荷的节点集合。
1.1 发电机分担的功率缺额
发电机的功率缺额可通过发电机转子运动方程求得,如式(2)所示。计算所需的频率变化率在扰动初始时刻测量所得。
(2)
式中:Mi、ωi为第i台发电机的转动惯量和转子角速度;Pm,i、Pe,i和ΔPg,i为第i台发电机的机械功率、电磁功率和不平衡功率。
在标幺值下,有ωi=fi,系统的不平衡功率可以表示为:
(3)
式中:Meq和fcoi分别为系统的等值惯量和惯量中心频率。
1.2 负荷分担的功率缺额
当系统发生故障时,负荷节点的电压会发生偏移,可通过其电压变化参数求得此时的功率缺额。本文选用静态负荷模型,表达式为:
(4)
式中:ap,i、bp,i和cp,i分别为恒阻抗、恒电流和恒功率比例;Vi0和Vi为扰动前和扰动瞬时i节点的电压;kp,i为频率影响因子。
2 减载节点及容量的确定
减载地点的不同也会影响频率恢复特性,因此选择合适的负荷节点非常重要。由文献[7]可知,可综合考虑负荷的频率调节效应和有功-电压特性来制定选址定容的方案。优先切除贡献因子KL和dv/dp较小的负荷更有利于频率的快速恢复。本文综合考虑贡献因子KL和dv/dp构建了减载贡献因子模型,如式(5)所示。
(5)
式中:βi为母线重要程度的权值;λ1和λ2为贡献因子的权重系数,其关系满足λ1+λ2=1;dvi/dpi为母线i的灵敏度值;KLi为母线的频率调节系数。
由式(5)提出应用减载影响指标为基础的减载量分配模型,其中减载贡献因子越小,则分担的减载量更多,如式(6)所示。
(6)
式中:αi为Fi的反比参数;ΔPij%为第i轮减载中母线j的减载比;Pi为母线i的有功负荷;Pshed.j为第j轮动作切除的负荷量。
3 自适应低频减载方案
本文设计方案基于功率缺额的最大计算误差,由两部分组成。第一部分为基本控制级,包括两轮,首轮动作频率设置为49.5 Hz,动作延迟0.2 s,基于最大相对误差(约10%的范围内,计算结果见4.2节表2),切除90%计算缺额用来避免过切负荷且兼顾频率的快速恢复,利用系统的备用容量减小切负荷量。第二轮的动作频率设置为49.3 Hz,动作延迟0.2 s,切除10%计算缺额。第二部分为校正控制级,包括两轮,首轮的动作频率为49.8 Hz,动作延迟时间15 s,切除5%的计算缺额,防止欠切负荷导致频率悬停。校正第二轮的动作频率49.5 Hz,用于防止在低频减载时发生二次故障,例如当系统频率或电压过低时风机被切出系统,进而导致系统的功率缺额变大,频率进一步降低。减载方案如表1所示。

表1 本文减载方案
4 仿真分析
4.1 算例系统
本文利用DIGSILENT PowerFactory作为仿真软件,拓扑结构如图1所示,在IEEE 39节点系统中进行验证。该系统发电机组发出总的额定有功功率为6 140 MW,负荷有功为6 097 MW。仿真选用静态负荷模型,设置40%的恒功率模型和60%的恒阻抗模型。

图1 IEEE 39系统拓扑结构
为验证本文方案的有效性,用5种典型场景说明,设置其发生功率缺额的扰动时间均为0.2 s。
场景A:风机比例为0。0.2 s时,G1(1 000 MW)和G3(650 MW)因故障切出系统,即发生了扰动大小为27%的功率缺额扰动。
场景B:用风机取代G7(560 MW)和G8(540 MW)机组,风机比例为18%。0.2 s时,G1(1 000 MW)和G3(650 MW)因故障切出系统,即发生了扰动大小为27%的功率缺额扰动。
场景C:用风机取代G4(508 MW)、G7(560 MW)和G8(540 MW)机组,风机比例为28%。0.2 s时,G1(1 000 MW)和G3(650 MW)因故障切出系统,即发生了扰动大小为27%的功率缺额扰动。
场景D:用风机取代G4(508)、G7(560 MW)和G8(540 MW)机组,风机比例为28%。0.2 s时,G9(830 MW)因故障切出系统,即发生了扰动大小为14%的功率缺额扰动。
场景E:用风机取代G4(508 MW)、G7(560 MW)和G8(540 MW)号机组,风机比例为28%。0.2 s时,G3(650 MW)、G6(650 MW)和G9(830 MW)因故障切出系统,即发生了扰动大小为35%的功率缺额扰动。
4.2 功率缺额的估计计算
对于4.1中所示的五种典型场景,可利用故障后初始时刻发电机和负荷节点的量测信息进行计算,将对应数据代入式(3)和式(4),可得计算结果如表2所示。

表2 计算结果
由表2可知功率缺额的计算存在误差,但相对误差均在10%之内,其主要原因是由于故障瞬时的发电机频率变化率和负荷节点的电压变化的数据提取误差。同时,系统潮流分布的变化也使得线路损耗发生改变,这也会引起估计误差。
4.3 自适应低频减载方案仿真分析
将本文减载方案应用于设置的场景,并与传统减载方案进行对比。传统方案包括基本控制级与校正控制级两部分,分别用于快速切除负荷与防止频率悬停。动作频率、延时和切负荷量通过事先预定设置,当系统频率下降低于设置频率,减载装置开始动作,传统方案如表3所示。
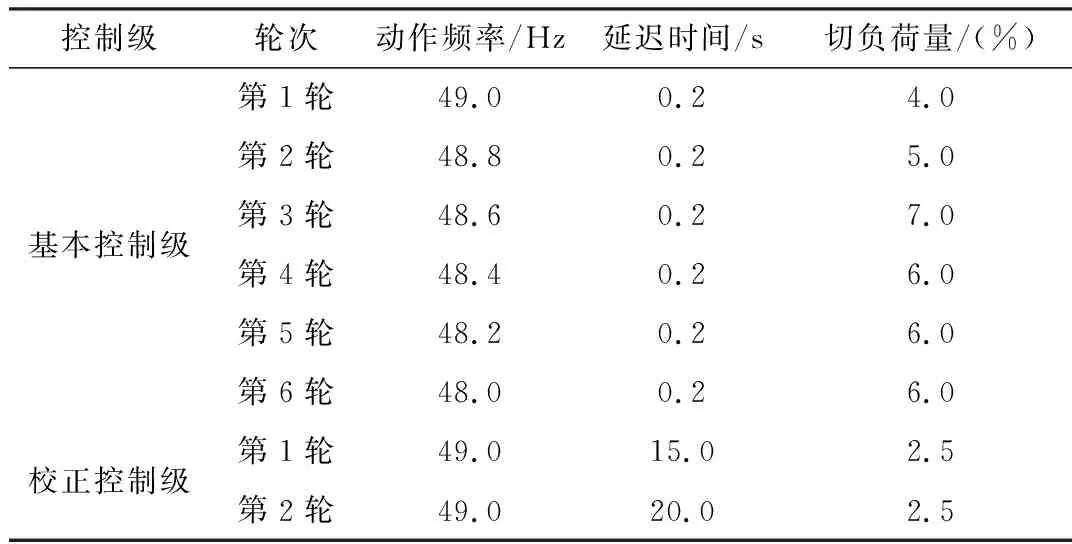
表3 传统减载方案
不同场景下本文方案与传统方案减载效果如图2~图6所示。
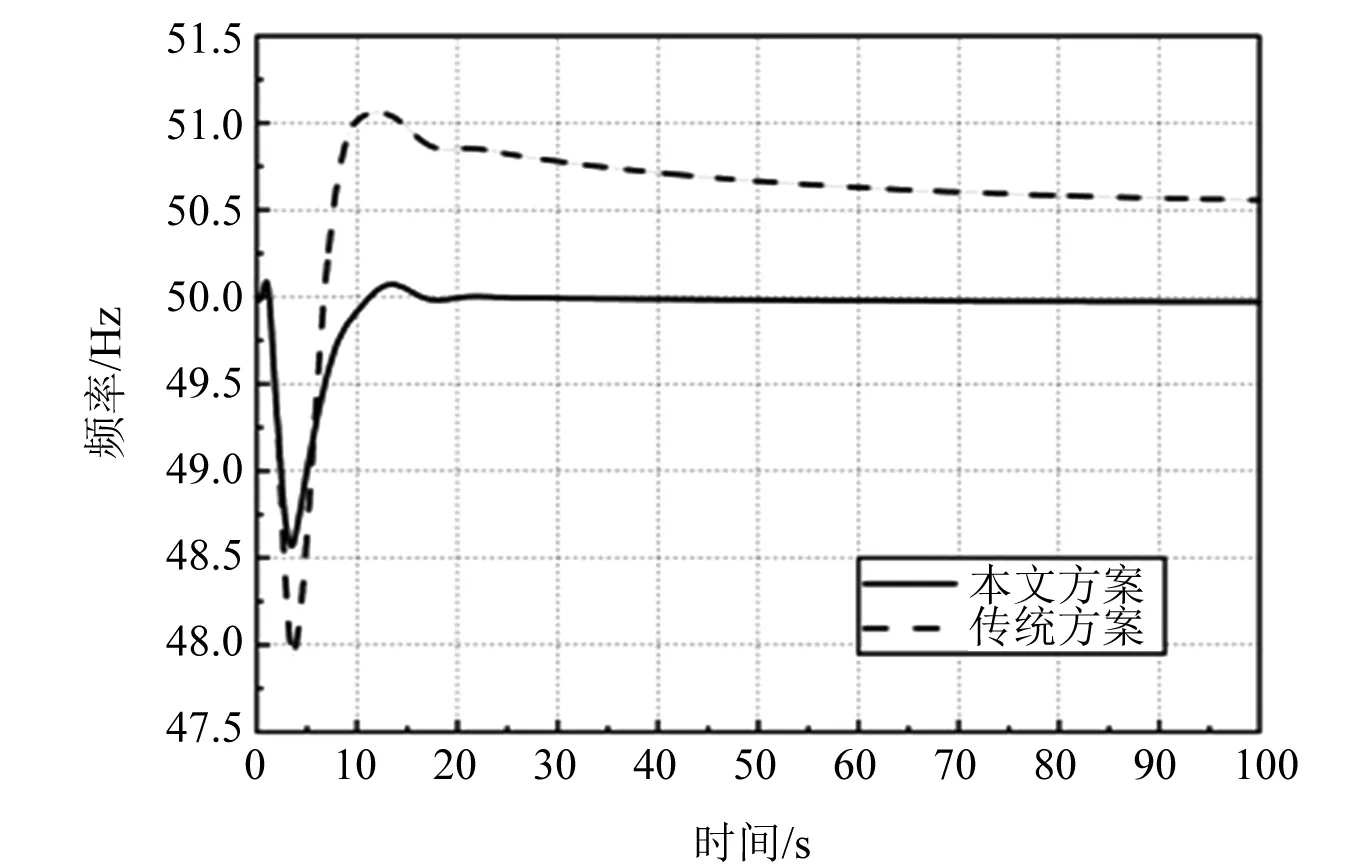
图2 场景A不同方案切负荷对比

图3 场景B不同方案切负荷对比

图4 场景C不同方案切负荷对比

图5 场景D不同方案切负荷对比

图6 场景E不同方案切负荷对比
图7为本文方案在场景A、B和C切除相同负荷的对比效果。表4为上述5种场景下,本文减载方案与传统减载方案减载效果的数据对比结果,包括稳态频率、最低频率、最高频率以及切除负荷量等主要评价指标。

图7 本文方案不同风机比例切负荷效果

表4 减载效果对比
4.4 仿真结果分析
从图2~图6以及表4可以看出,本文的减载方案明显优于传统的减载方案。就恢复后的稳态频率而言,本文方案的频率恢复速度更快,图5和图6中本文方案明显快于传统方案。而对于最低频率和最高频率,在五种场景中,本文方案的最低频率更高,最高频率更低,更加接近于额定频率。在切负荷量方面,场景A、B和C中本文方案切负荷量远小于传统方案,更加接近于实际的功率缺额,传统方案发生了负荷的过切;在场景D和E中本文方案切负荷量大于传统方案,接近于真实的功率缺额,传统方案发生了负荷的欠切。负荷的过切与欠切都导致了低频减载控制效果的变差。
图7为本文方案在场景A、B和C中切除相同负荷的对比效果,即系统运行在不同风机比例状态下,发生相同有功缺额扰动时本文方案的减载效果。由图7可知,随着风机比例的上升,减载时系统最低频率更小,当系统频率低于风机安全运行阈值时,就会触发低频保护而切出系统。从而功率缺额更大,频率也进一步降低,最终使得系统崩溃。因此,在有高比例风机的弱惯量系统中,更加要求当系统发生功率缺额扰动时能够更快、更正确地切除与实际缺额等值的负荷,使得频率可以更快地恢复。
5 结束语
基于风机比例不断提高的背景下,本文提出了新的低频减载策略,使得在系统发生功率缺额故障时有更好的频率控制效果。仿真结果表明,本文减载方案在不同风机比例的系统中,应对系统出现不同大小的功率缺额故障时都能获得良好的减载效果。相较于传统方案,本文方案具有更好的频率控制效果,能够快速且准确地切除负荷,使系统快速恢复到稳态频率。本文的减载方案能够更加适应弱惯量的系统,提高了系统故障后的频率恢复水平,对风电在电网中的持续发展具有重要意义。
