基于虚拟直流信号注入的内置式永磁同步电动机MTPA 控制方法
2022-12-16杨健,李峰
杨 健,李 峰
(宁夏大学 物理与电子电气工程学院,银川 750021)
0 引 言
内置式永磁同步电动机(以下简称IPMSM)因具有功率密度大、效率高、体积小等优点,被广泛应用于电动车、航空航天和家用电器等场合[1]。在恒转矩运行范围内,为了充分利用 IPMSM 的磁阻转矩,一般采用最大转矩电流比(以下简称MTPA)控制方法。然而在电动机实际运行过程中,由于受到磁路饱和效应、交叉耦合效应和温度变化等因素影响,IPMSM主要参数会发生变化[2-4]。传统MTPA控制方法视电动机参数恒定不变[5],难以实现精确的MTPA控制效果,而考虑参数变化的MTPA控制方法可以较好解决以上问题,近些年来逐渐成为研究热点。
目前,考虑IPMSM参数变化的MTPA控制方法,可以分为离线方法和在线方法。对于离线方法,需要通过查表获得电动机当前运行条件下的参数,再通过公式法计算实现精确的MTPA控制对应的电流角。查表数据需要通过实验测试或者有限元方法获得,再将结果存储在控制器内存中,以避免复杂的在线计算[6-8]。但在获取数据时需要同时考虑磁路饱和及交叉耦合等影响,必须进行大量的实验或仿真,费时费力。文献[9]通过相对复杂的控制方法提出了一个更简单的查表法,d轴和q轴参考电流在每次迭代时根据查表法进行更新,直到它们收敛到稳定状态。然而,这样的迭代算法可能收敛到错误的结果。
在线方法通常可以分为搜索法和信号注入法。文献[10]通过搜索法比较相邻采样时间的反馈转矩或者电流幅值来调整电流角大小,最终收敛得到当前转矩条件下实现MTPA控制对应的电流角。此方法不需要依赖电动机参数,但收敛速度慢,对采样精度敏感。为了克服以上方法存在的问题,近几年有学者提出信号注入法。信号注入法是基于电磁转矩对电流角的导数等于零求解不同转矩条件下实现MTPA控制对应的电流角,该导数是从高频信号注入电动机后的转矩响应中提取得到[11]。
信号注入法可以分为实际信号注入法和虚拟信号注入法。这两种方法注入的信号主要是正弦信号或者方波信号。文献[12]中,高频正弦信号被注入到实际电流角中,从测得的功率响应中提取补偿电流角,它适用于多种情况,但是同时会引起实际电磁转矩波动,带来额外的信号干扰和损耗。为了避免注入信号产生干扰,文献[13]提出基于虚拟正弦信号的注入法,精确跟踪了 MTPA 轨迹,但由于滤波器的存在,电流响应较慢。文献[14]提出基于虚拟正弦信号注入的MTPA控制方法,忽略了d轴电感对MTPA控制效果的影响,这导致在不同转矩条件下的MTPA轨迹跟踪误差,需要获得d轴电感参数来实现更精确的MTPA控制。文献[15]提出基于虚拟高频方波信号注入的MTPA控制方法,避免了滤波器带来的不利影响,可获得快速准确的跟踪性能。为了进一步提高MTPA控制效果,文献[16]考虑到IPMSM运行中参数的变化,通过分析参数变化引起的误差,得到永磁体磁链和d轴电感变化引起的误差近似抵消,从而减少需要辨识参数的个数,并通过补偿q轴电感变化引起的误差,提高MTPA控制效果。
综上所述,现有基于虚拟正弦信号注入的MTPA控制方法仅考虑了由IPMSM磁路饱和效应引起的参数变化,却忽略了交叉耦合效应带来的影响。随着负载增加,交叉耦合效应的影响变大,现有方法的准确性也随之下降,因此电动机无法在全部负载范围内实现令人满意的性能。为此,本文提出基于虚拟直流信号注入的MTPA控制方法。此方法综合考虑了由IPMSM磁路饱和及交叉耦合效应引起的参数变化,不依赖IPMSM本体参数,在注入同一虚拟信号的基础上,寻找到由q轴静态电感变化导致的误差,并进行补偿,从而可进一步提高MTPA控制精度。此外,对比基于虚拟正弦信号注入的MTPA控制方法,该方法还可避免滤波器的使用,从而获得快速准确的跟踪性能,提高MTPA控制的效果。
1 MTPA控制方法基本原理
在稳态运行条件下,考虑磁路饱和及交叉耦合效应时IPMSM的电压方程、电磁转矩方程分别如下:
(1)
(2)
式中:ud,uq和id,iq分别为d,q轴的定子电压和定子电流分量;Ld(id,iq),Lq(id,iq)分别为d,q轴的静态电感;Ψf(id,iq)为转子永磁体磁链;R为定子相电阻;ωe为转子电角速度;p为电动机的极对数;Te为电磁转矩。
Ψf(id,iq)主要随温度的改变而变化,受id和iq变化影响较小,并且本文主要考虑由IPMSM磁路饱和及交叉耦合效应引起的参数变化,在以下MTPA控制中忽略其变化。基于有限元仿真软件Maxwell,根据IPMSM设计参数(主要参数如表1所示),可获得不同id和iq条件下Ld(id,iq)、Lq(id,iq),如图1、图2所示。可知,随着id、iq的改变,Lq(id,iq)的变化比Ld(id,iq)更大,故由此引起的MTPA控制误差不能忽略,其补偿方法在下文中详细介绍。

表1 IPMSM的主要参数
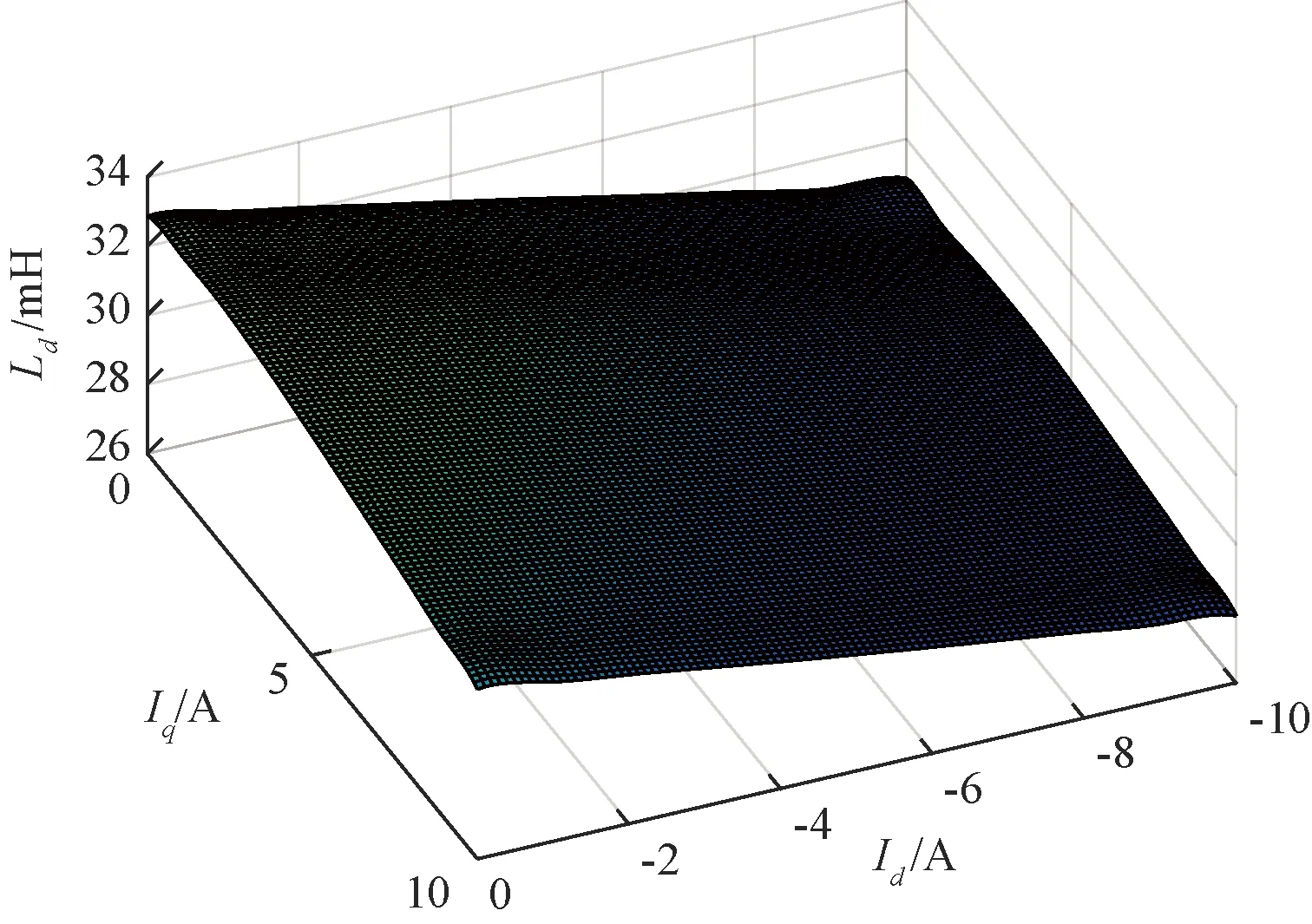
图1 不同id和iq条件下的Ld(id,iq)
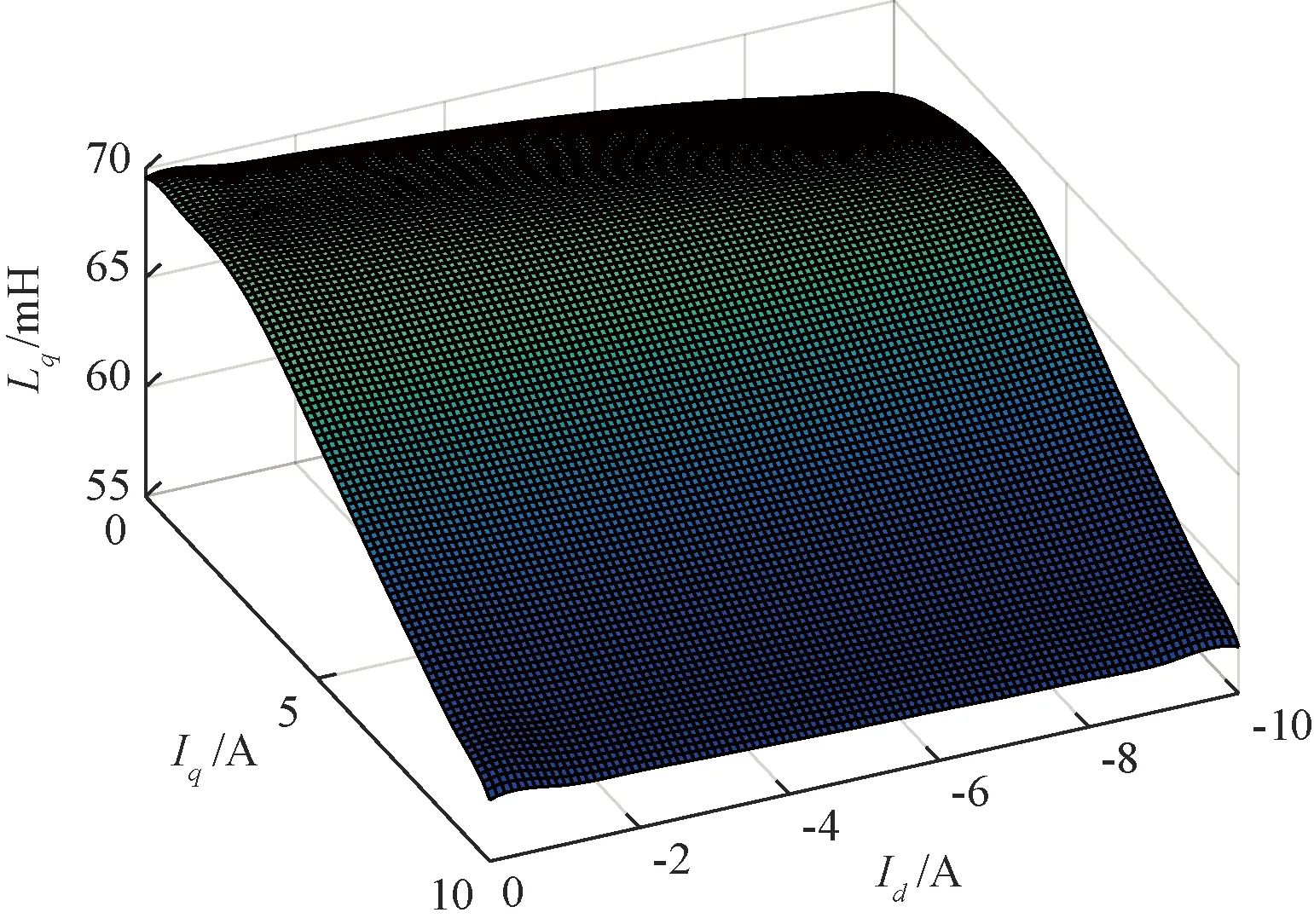
图2 不同id和iq条件下的Lq(id,iq)
将id、iq用定子电流矢量幅值Is和电流角β表示如下:
(3)
式(3)中,电流角β是定子电流矢量和q轴的夹角,联立式(2)、式(3),可得:

(4)
(5)
联立式(3)、式(5)可得到对应的d、q轴定子电流,以实现MTPA控制。但是实际上d、q轴定子电流变化会对电动机的d、q轴静态电感产生影响,温度变化会对永磁体磁链产生影响,可见,通过式(5)难以实现精确的MTPA控制。
为了实现更为精确的MTPA控制,需要考虑IPMSM的d、q轴静态电感和永磁体磁链变化带来的误差,因此,考虑磁路饱和及交叉耦合效应的影响时,电磁转矩对电流角的偏导数表示如下:
(6)
2 基于正弦信号注入的MTPA控制方法
基于正弦信号注入的MTPA控制方法需要向电流角中注入高频正弦信号δ(t)=Asin(ωht),因此,由式(3)可得注入正弦信号后的d、q轴电流表达式:
(7)

(8)


(9)
图3为基于虚拟正弦信号注入的MTPA控制方法原理框图,其中BPF为带通滤波器,LPF为低通滤波器。
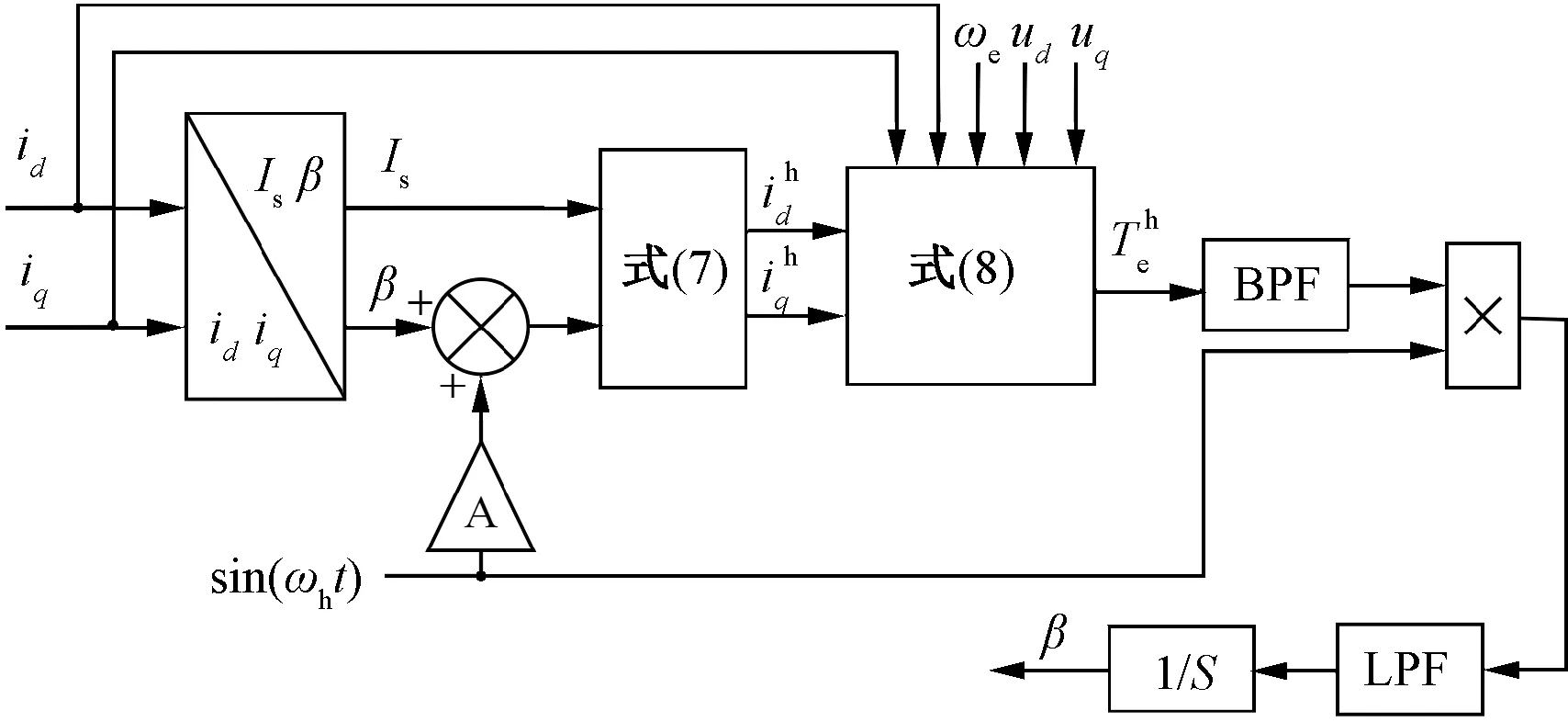
图3 基于虚拟正弦信号注入的MTPA控制方法原理框图

3 基于虚拟直流信号注入的MTPA控制方法
本文在上述基于正弦信号注入的MTPA控制基础上,提出基于虚拟直流信号注入的MTPA控制方法,式(8)中,由于Ld在电机运行过程中的变化很小,故用电机额定参数表示。由式(9)可知,若对电流角β分别注入直流信号γ(t)=A和γ(t)=-A,经过化简,可得:
(10)
由于A非常小,故可忽略式(10)中的高阶项,可得:
(11)
式(11)的零点即为当前转矩条件下实现MTPA控制对应的电流角β,但是此处没有考虑IPMSM参数随定子电流变化造成的影响。
在IPMSM运行过程中,静态电感Ld(id,iq)、Lq(id,iq)和永磁体磁链Ψf(id,iq)将随负载变化而变化,其中Ld(id,iq)、Ψf(id,iq)的变化很小,并且由文献[16]可知,这两项的误差可近似抵消,故忽略这两项参数变化。Lq(id,iq)变化较为明显,对其变化引起的误差进一步分析。
由式(1)、式(3)可知:
(12)
式(12)中,对电流角β注入信号γ(t),联立式(7)、式(12)可得:

(13)

(14)
分别注入直流信号γ(t)=A和γ(t)=-A,同样忽略相应的高阶项,进一步化简可得:

(15)
(16)
通过式(16),可进一步得到当前转矩条件下实现精确的MTPA控制所对应的电流角β。


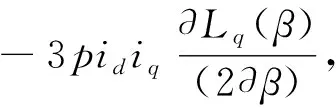
图4 基于虚拟直流信号注入的MTPA控制方法原理框图
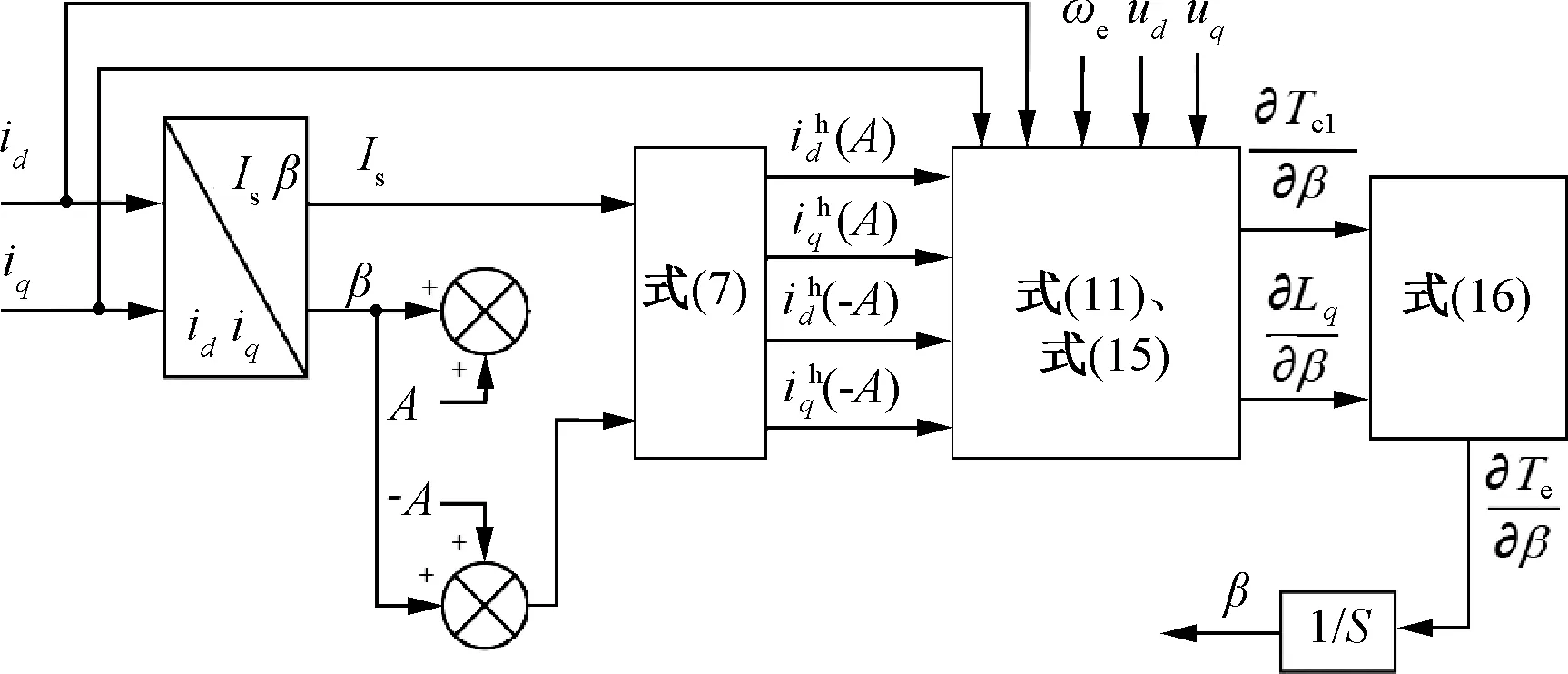
图5 基于虚拟直流信号注入的MTPA控制方法β获取过程图
4 仿真验证
为了验证本方法的有效性,本文使用ANSYS Maxwell设计IPMSM,并考虑电动机磁路饱和及交叉耦合效应影响,获得不同定子电流对应静态电感Ld(id,iq)、Lq(id,iq),基于MATLAB/Simulink仿真平台搭建考虑d、q轴静态电感参数变化的IPMSM模型,电动机主要参数如表1所示(其中静态电感与永磁体磁链为IPMSM在额定条件下对应的值)。对基于虚拟正弦信号注入的MTPA控制方法和基于虚拟直流信号注入的MTPA控制方法进行仿真对比验证,图6为在转速500 r/min下采用不同方法得到的MTPA轨迹,图7是转速1 500 r/min下的仿真结果。可以看出,不同条件下,相较于采用基于虚拟正弦信号注入法,采用本文的方法可以获得更佳的MTPA控制效果,即对应的MTPA轨迹更接近于IPMSM实际的MTPA轨迹。

图6 500 r/min下采用不同方法得到的MTPA轨迹

图7 1 500 r/min下采用不同方法得到的MTPA轨迹
图8是转速500 r/min下负载转矩连续增加时的仿真结果。电磁转矩Te、电流矢量幅值Is、电流角β和转速n响应都很快,在不同转矩情况下,基于虚拟直流信号注入的MTPA控制方法在相同转矩下的电流矢量幅值Is都小于基于虚拟正弦信号注入的MTPA控制方法得到的结果,能量利用率更高。如图8(a)所示,同一负载转矩情况下,两种方法得到的电磁转矩曲线重合,输出结果稳定。如图8(b)所示,在负载转矩为12 N·m时,本文方法的电流矢量幅值Is比基于虚拟正弦信号注入的MTPA控制方法的结果小0.08 A,约1.79%,铜损耗更低。如图8(c)所示,在相同负载转矩下,本文的改进方法获得的不同转矩下实现MTPA控制对应的电流角β都比基于虚拟正弦信号注入的MTPA控制方法得到的结果更精准,例如在负载转矩为8 N·m时,实际MTPA控制对应电流角β为13.32°,基于虚拟直流信号注入的MTPA控制方法对应电流角β为12.28°,误差约为7.81%,基于虚拟正弦信号注入的MTPA控制方法得到对应电流角β为21.99°,误差约为65.09%。可见,在考虑IPMSM参数变化时,采用本文方法可以得到精度更高的MTPA控制效果。图8(d)是转矩变化情况下的转速输出曲线,在转矩变化点处,转速响应快,并且能够快速恢复稳定。

图8 500 r/min下负载转矩连续增加时的仿真结果
图9为转速1 500 r/min条件下得到的仿真结果,可得到与之前相同的结论,也就是说在不同转速条件下采用本文方法仍然能够获得更好的MTPA控制效果。

图9 1 500 r/min下负载转矩连续增加时的仿真结果
图10为负载转矩为10 N·m,给定转速从500 r/min开始每隔3 s增加500 r/min条件下得到的MTPA跟踪曲线。在转矩恒定、转速突变时,采用两种方法都可以快速得到当前转矩条件下实现MTPA控制对应的β角。由此可见,这两种方法对于转速变化都具有良好的响应效果,但基于虚拟直流信号注入的MTPA控制方法精度更高,响应速度更快。
图10 负载转矩恒定、转速连续变化条件下MTPA跟踪曲线
5 结 语
综上所述,本文提出了一种基于虚拟直流信号注入的MTPA控制方法,该方法可以补偿IPMSM磁路饱和及交叉耦合效应引起的q轴电感变化带来的误差,而且无需像基于虚拟正弦信号注入的MTPA控制那样使用滤波器。由仿真分析结果可知,使用该方法可以从MTPA控制的精度和MTPA轨迹的跟踪速度两方面都得到提高,进而可进一步提高MTPA控制的效果。
