基于CANOpen的变形机翼控制系统研究
2022-12-16张银龙李华峰
张银龙,陈 浩,李华峰
(南京航空航天大学 机械结构力学及控制国家重点实验室,南京 210016)
0 引 言
随着航空科技的快速发展,人类对飞行器的性能提出了更高的要求,研发人员也不断尝试各种方法以提高飞行器的综合性能[1]。
对于飞机而言,机翼是其升力和操纵力的主要来源。人们通过控制机翼各刚体间的相对运动来进行机翼的伸缩、折叠、扭转和弯曲等变形。按照机翼不同的变形方式可以分为伸缩机翼技术、折叠机翼技术、可变后掠翼技术、主动柔性机翼技术、主动弹性机翼技术等[2]。
变形机翼内的变形作动器将电能转化为机械能,是变形结构的动力来源,采用低能耗、高输出的作动器可以有效提高变形效率。传统的变形机翼动力来源于自液压作动器,其体积质量消耗较大[3]。超声波电动机以其独特的优良特性占据了重要的一席之地,其具有体积小、质量轻、响应快和断电自锁的特点,非常适合用于变形机翼的变形机构作动。
本文旨在研究变形机翼的驱动控制系统,机翼由10个单一的蜂窝结构构成,每个结构通过减速器与超声波电动机连接进行变形。通过CANOpen协议控制每台超声波电动机的旋转方向和角度,可对机翼的变形做出精确控制。
1 变形机翼控制系统设计方案
变形机翼的控制系统由上位机、协议转换器和超声波电动机驱动控制器等组成。系统设计框图如图1所示。
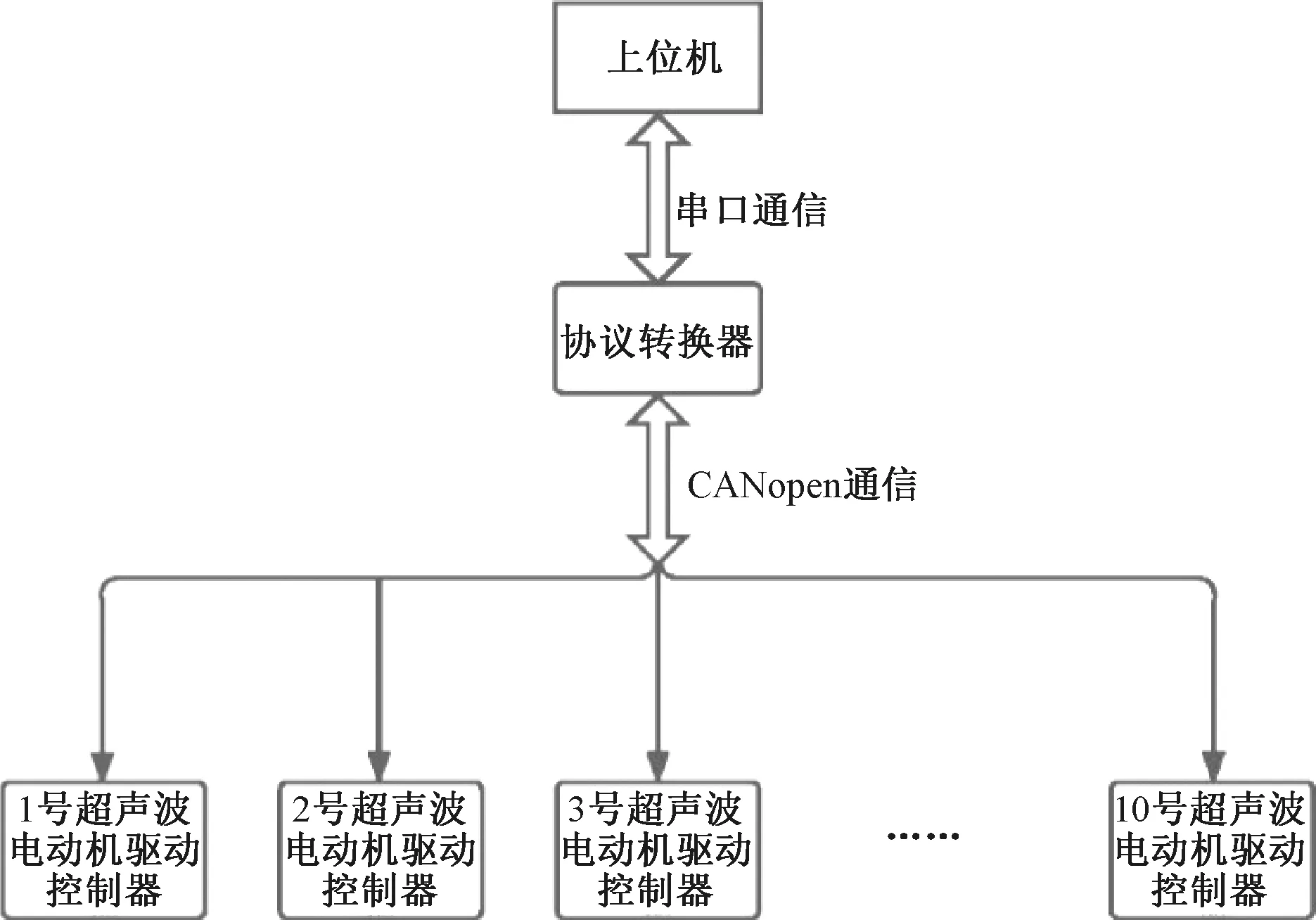
图1 系统总体框图
上位机通过RS232总线与协议转换器进行串口通信,完成控制指令的下发和机翼运行参数的可视化。上位机接收的参数主要包括:超声波电动机驱动器是否在线、10台超声波电动机的当前位置;发送的指令参数主要包括:各个超声波电动机的起动、目标位置、急停、复位和置零等。本文上位机软件基于Qt进行开发,其软件界面如图2所示,右边界面显示各个电机的位置曲线。

图2 上位机界面
协议转换器是上位机和驱动器之间信息传递的中继,向上作为下位机,将驱动器发送过来的CAN信息解析为RS232信息发送至上位机,向下作为CANOpen主站,将上位机发送的RS232指令解析为CAN信息发送至各个驱动器。
超声波电动机驱动器完成的是接收协议转换器发来的控制指令,按要求对超声波电动机进行控制,并实时上传超声波电动机位置信息。
2 控制系统硬件设计
变形机翼控制系统的硬件包括协议转换器和超声波电动机驱动器,它们都是以STM32F103为控制核心,以RS232和CAN总线作为信息传输的网络。系统总体的硬件设计方案如图3所示。
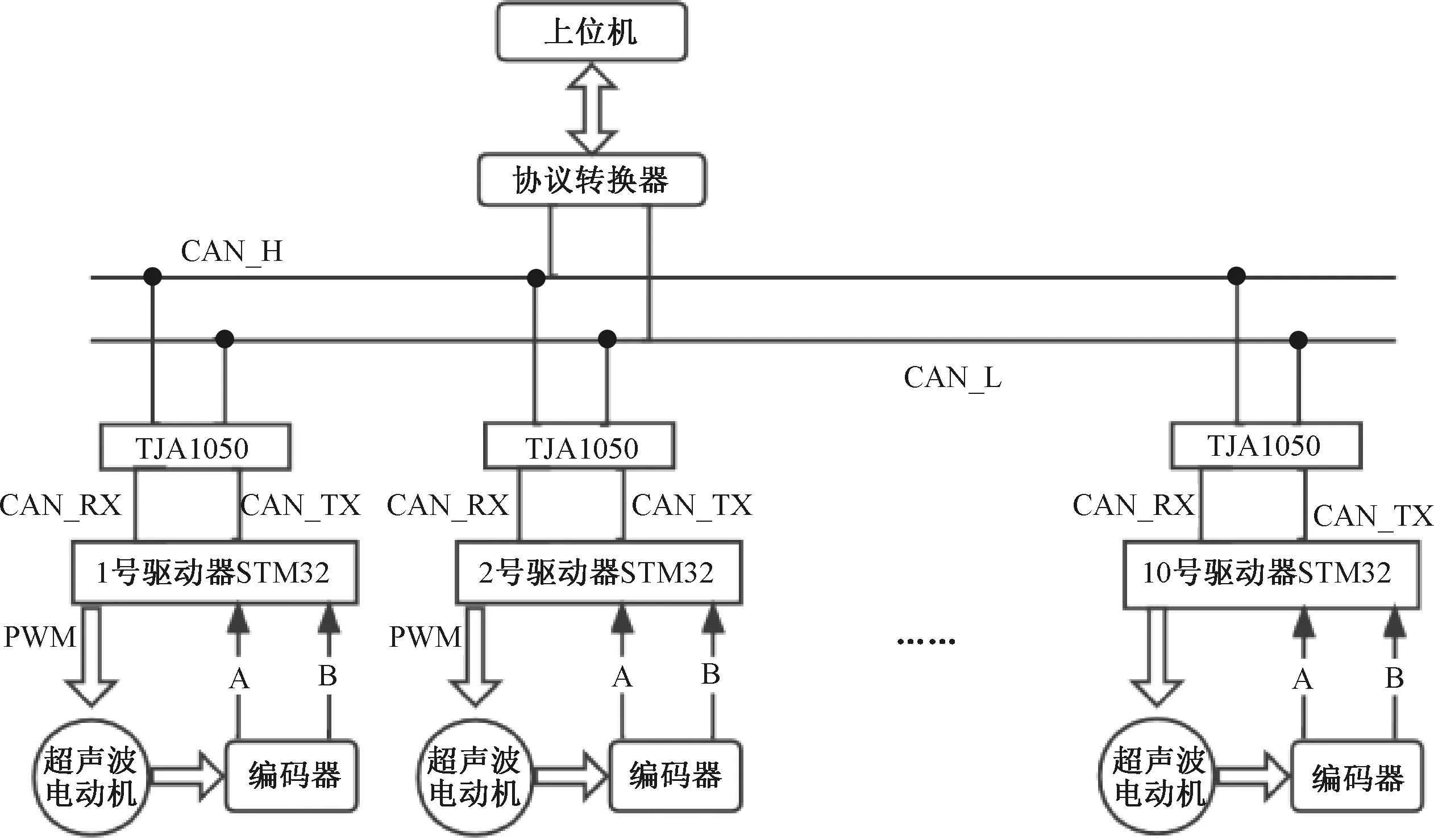
图3 系统硬件设计
2.1 电源模块
超声波电动机驱动器和协议转换器的输入电压皆为DC28 V。STM32单片机使用DC3.3 V电压,其产生的PWM波电压无法直接驱动MOSFET,需要通过IR2101S将PWM波电压升高至DC12 V,故通过LM2576将DC28 V转换为DC12 V供给至IR2101S。由于编码器驱动电压为DC5 V,所以通过REG1175-5将DC12 V转换为DC5 V供给编码器,再通过REG1175-3.3将DC5 V转换为DC3.3 V供给至STM32使用。整个电路的电压转换如图4所示。

图4 电压转换
2.2 电机驱动电路
超声波电动机需要两路频率相同、电压幅值相同、相位差为90°的高频正弦交流电信号驱动。通过改变信号的频率对超声波电动机进行速度控制,通过改变两相信号的相位差进行转向控制。
根据设计需求,超声波电动机的设定速度为120 r/min,超声波电动机驱动器通过编码器电路实时采集电机的当前速度并输入到STM32内部的PID调速任务当中。通过PID调速,将速度误差控制在±1.5 r/min,以达到10台超声波电动机的步调一致性目标。
由STM32产生的4路PWM信号驱动,如图5所示的推挽逆变电路,将28 V直流电转化为峰值500 V以上的交流电。超声波电动机驱动器的实物图如图6所示。

图5 推挽逆变电路图

图6 超声波电动机驱动器
2.3 协议转换器电路
协议转换器用于RS232串口与CAN间的协议转换,因此协议转换器电路较为简单,只需要电源模块、RS232通讯模块、CAN网络模块。CAN网络电路通过TJA1050将消息发送到CAN网络和接收到STM32内,CAN网络电路如图7所示,协议转换器的实物图如图8所示。

图7 CAN网络电路图

图8 协议转换器电路图
3 通信系统设计
所有超声波电动机驱动器与协议转换器的连接通过CAN通信网络。将协议转换器作为主站,驱动器作为从站,以CAN网络作为硬件层,CANOpen作为软件层进行通信。
3.1 CANOpen通信协议
CANOpen是一种基于CAN总线的应用层协议,是具有高度灵活配置能力的标准化嵌入式网络协议。CAN的数据链层提供具有标识符的报文广播,通过CAN报文携带的ID帧决定是否接收通信对象所携带的数据[5],CANOpen就是基于此硬件层完成各个站点的相互通信。
CANOpen协议包括设备模型、通信模式和对象字典等三大部分,对象字典在CANOpen最为重要[6]。
3.2 CANOpen对象字典
CANOpen对象字典包含了4种不同类型的通讯对象,分别为网络管理对象NMT、过程数据对象PDO、服务数据对象SDO和特殊功能对象[7]。对象字典的配置通过如图9所示的CanFestival对象字典生成工具进行直接配置,提高了开发的便利性,减少了开发时间。

图9 对象字典生成工具界面
NMT主要用于管理和监控CAN网络当中的各个节点状态[8]。PDO和SDO均是用来数据传输的,不同的是PDO用于实时数据传输,SDO用于应答传输。PDO又分为TPDO和RPDO,TPDO按照预定义的内容进行实时数据的发送,RPDO按照预定义的节点ID、索引、子索引和数据类型判断TPDO的数据是否与自己相匹配[8]。PDO的发送不需要节点回复,只需要发送即可,因此具有高效传输效率。SDO则需要节点进行应答,SDO通过节点ID、索引、子索引和数据类型传输,SDO发送后必须等待节点应答,应答内容与发送内容相同。
3.3 CANOpen协议设计
变形机翼将协议转换器作为CANOpen的主站、超声波电动机驱动器作为CANOpen的从站。CANOpen的主从站通过CAN_id进行设置,主站为0x00,从站为0x00~0x7f,通过拨动超声波电动机驱动器上面的拨码开关进行设置驱动器的CAN_id。
SDO发送的是命令,协议转换器获取上位机发送的命令,然后通过SDO将命令发送出去。发送的命令包括超声波电动机的起动电机、目标位置、急停、位置置零、复位电机位置等。SDO的发送通过调用函数writeNetworkDict()发送。
SDO发送完成后必须将发送通道关闭,否则将一直占用SDO的发送通道,导致系统无法发送下一个SDO,关闭通道的函数为closeSDOtransfer()。
TPDO用于驱动器上传超声波电动机的当前位置。根据预先设计定义的PDO参数,将电机的位置实时地上传到协议转换器,最后解析上传到上位机当中。从站配置TPDO、主站配置RPDO,形成一对一模式。
4 实验测试
在实验测试过程中,将10个驱动器的节点ID通过拨码开关分别设为0x01、0x02,……,0x0a。通过图10的ECANTools软件界面观测到整个CAN网络的状态。可以看到,每隔1 ms,驱动器的心跳数据会通过CAN网络发送,协议转换器根据是否及时收到心跳数据来判断驱动器是否在线。上位机通过SDO发送位置信息,驱动器同样也返回位置信息,说明SDO发送成功,与我们设计的协议相符合。图11和图12分别为机翼变形前和变形后的状态,可以明显地看到,机翼完成了相应的变形动作。

图10 ECANTool实验数据信息

图12 机翼变形后状态
5 结 语
本文以CAN网络作为硬件层,CANOpen为软件层,设计了变形机翼的控制系统。首先介绍了变形机翼的控制系统组成,之后设计了硬件电路,并具体地介绍了如何配置CANOpen协议的主站和从站,以及CANOpen数据的配置方法等。本文描述的内容可方便用户配置CANOpen主从站,大大减轻用户配置负担,提高了控制系统的开发效率。
