基于三电平逆变器和模型预测的电机控制方法
2022-12-16姜泽超朱蕴璞
姜泽超,朱蕴璞,孙 乐,高 鹏
(1.南京理工大学 机械工程学院,南京 210014;2.南京理工大学 自动化学院,南京 210014)
0 引 言
永磁同步电机具有结构灵活、体积小、质量轻、效率高、功率因数高等显著特点[1],因此在运动控制中得到了广泛使用。由于存在外部干扰、不确定性和非线性等问题,传统的线性控制方法,包括比例积分(PI)控制方法,并不能在控制过程中保证伺服系统具有足够高的控制性能[2]。为了提高伺服系统的控制性能,近年来,随着控制芯片微处理器性能的提高,一些现代控制理论中常用的控制策略被运用到永磁同步电机控制中,例如线性化控制[3]、自适应控制[4]、鲁棒控制[5]、滑模控制[6]、模糊控制[7]等。
采用多电平逆变器驱动是一种能够有效降低永磁同步电机电流谐波的方法[8]。三电平逆变器是应用比较广泛的多电平逆变器,由于拓扑结构的差异,三电平逆变器能输出三个电平,输出电压和电流谐波相较于两电平逆变器更小。同时,三电平逆变器的开关管个数比两电平逆变器多,同样的输出电压下,每个开关管所需承受的电压更低,因此在保证逆变器安全运行的情况下,能够提高开关频率,输出谐波进一步降低[9]。
大惯量随动系统的负载惯量大且在工作过程中实时变化,对其伺服控制是较为复杂的问题。对于这类复杂的控制问题,一些传统的控制方法如PI控制、模糊控制、自适应控制等并没有针对负载惯量时变的特点进行研究,不能提供很好的控制性能。
模型预测控制(以下简称MPC)是工业应用中最实用的先进控制技术之一[12]。永磁同步电机伺服系统的控制策略可以看成是一个最优化问题,而MPC是一种最优控制方法,它在每个采样时间内对有限集内的某个目标函数的代价函数进行在线寻优,以此来预测状态的未来行为[13-14]。
文献[15]了优化永磁同步电机伺服系统的控制性能,将MPC方法引入速度环的控制设计中,采用简化模型预测永磁同步电机未来的q轴电流,通过最小化二次型性能指标得到最优控制律。文献[16]将MPC运用到负载系统的控制策略中,建立了大惯量随动系统负载的动力学模型,并考虑系统性能指标、能量输入功率和制动功率等约束条件,实现了大惯量随动系统的MPC。
MPC在控制过程中若受到了强干扰的影响,可能会导致控制性能的下降。文献[15]研究了永磁同步电机的扩展状态观测器(以下简称ESO)速度控制方法,ESO比通常的状态观测器高一阶,用于估计状态和集中扰动,永磁同步电机速度外环采用状态反馈控制器,通过ESO将负载转矩估计为扰动,仿真和实验验证了该方法的可行性。文献[17]针对永磁同步电机系统中的强扰动问题,引入了ESO来估计集中扰动,且在速度控制器中添加了基于估计扰动的前馈补偿项,并通过仿真和实验验证了该方法的有效性。
MPC能够在控制器中将大惯量随动系统的约束包含在内并进行控制,因此对于大惯量随动系统这类复杂的控制问题,MPC能提供较好的控制性能。但是MPC方法的抗干扰性能较差,为了提高MPC方法在整套控制方案中的抗干扰性能,在MPC反馈部分的基础上,在速度控制器中添加了基于估计扰动的前馈补偿项。本文提出了一套二极管箝位型(以下简称NPC)三电平逆变器、MPC与ESO相结合的复合控制方案,并将该方法应用于驱动系统,提高了摆臂机构的动态响应与控制精度。
1 摆臂结构驱动系统动力学模型
该驱动系统主要由永磁同步电机和由负载以及连接轴组成的摆臂结构构成。摆臂结构在永磁同步电机作用下做到位控制。摆臂结构电机驱动系统结构示意图如图1所示。
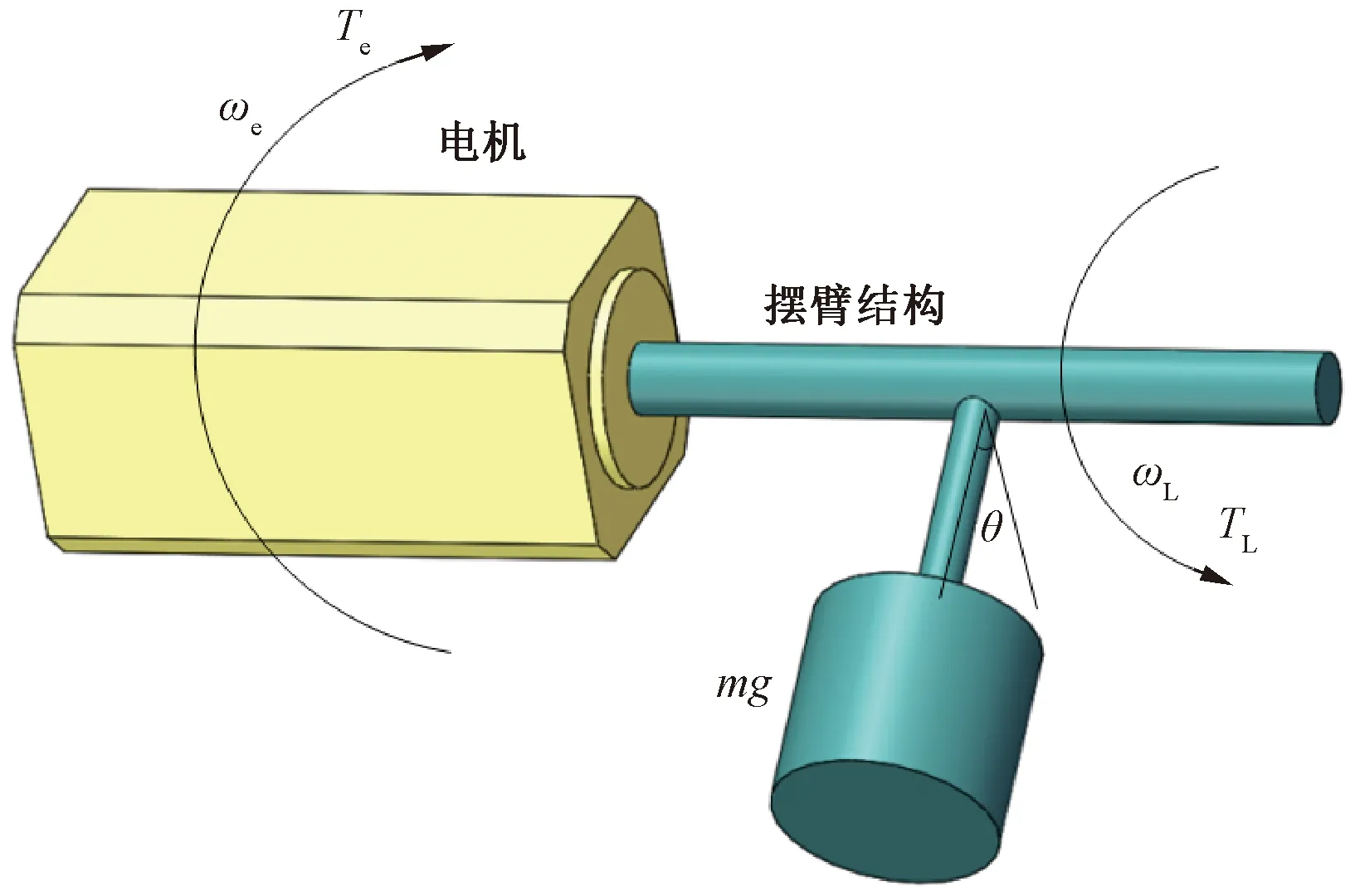
图1 摆臂驱动系统结构示意图
1.1 永磁同步电机的数学模型
永磁同步电机在d-q坐标系下转矩方程:
Te=p[ψfiq+(Ld-Lq)idiq]
(1)
式中:id,iq为d,q轴下的定子电流;p为电机极对数;Ld,Lq为d,q轴下的电感;ψf为磁链。
表贴式永磁同步电机的Ld=Lq,则式(1)化简:
(2)
1.2 摆臂驱动系统机械运动方程
在摆臂结构驱动系统中,永磁同步电机根据给出的位置指令输出动力,驱动摆臂结构进行回转运动,且通过编码器来实时获得摆臂的位置反馈,来计算后续的控制序列。基于大惯量单电机直驱系统的数学模型,本文的摆臂机构伺服系统的数学模型:
(3)
式中:Te为电机的电磁转矩;J为折算到电机轴上的总转动惯量;θrm为电机轴机械角位置,也是负载和竖直方向夹角;负载转矩TL=mgLarm,mg是负载重力;D是摩擦系数。
2 基于MPC算法的控制系统
2.1 NPC三电平逆变器的驱动原理
NPC三电平逆变器广泛应用于工业领域[19-20],其结构包括12个开关和6个箝位二极管。
NPC三电平逆变器的拓扑结构如图2所示,其中开关Sx1和Sx2、Sx3和Sx4是互补状态。在永磁同步电机控制系统的电流环中,NPC三电平逆变器可以产生比传统两电平逆变器更高的开关频率,以降低电流谐波分量(THD)。

图2 NPC型三电平逆变器拓扑
由于共有12个开关,NPC三电平逆变器共有27种开关状态可用。这些开关状态可以在静止轴上产生27个电压矢量,包括8个冗余电压矢量和18个非冗余电压矢量。NPC三电平逆变器的可用电压矢量如图3所示。NPC三电平逆变器的开关状态和相电压如表1所示,其中x=a、b、c。

图3 NPC三电平逆变器的有效电压矢量

表1 NPC三电平逆变器的开关状态和输出电压
NPC逆变器的直流侧有2个电容串联分压,因此,当2个电容的中点电压平衡时,才能保证驱动系统正常可靠运行。如果中点电压不平衡,轻则降低逆变器的输出效率,影响电机的调速性能,严重时会对逆变器中的电容和开关管造成损坏。而造成中点电压不平衡的原因是多方面的,比较常见的有[25]:
(1)现实中,两个电容的容值不可能完全相等,从而造成中点电压的恒定偏置;
(2)中点电压的波动会随着直流侧电容的容值变化,容值越小,波动越严重;
(3)中点电流能够直接反映出定子电流的大小,当负载转矩增大时,中点电流增大,波动越严重。
2.2 MPC算法的控制原理
MPC控制原理如下:在每一个采样时刻,根据当前获得的各项用于预测的信息量,先建立一个预测模型,并对模型输出与实际输出之间的误差进行校正,然后给出一种控制律,使得被控信号能够跟踪参考轨迹,最后通过一种滚动优化的方式得出一个被控信号到参考轨迹之间的最优过渡,并将得到的结果序列中的最优结果作用于被控对象。
MPC一般由以下几个部分组成:
(1)基函数:在MPC中,将输入表示为已知基函数ubj的线性组合[26]:
(4)
式中:N为基函数的个数;uj为性能指标优化过程中需计算的参数;P为预测时域;ubj(i)为基函数在t=iTs时刻的值;Ts为采样时间。
(2)预测模型:MPC中需要一个线性的数学模型用于在线预测有限时间内的未来输出。这个预测模型通常为离散形式:
xm(k)=Axm(k-1)+Bu(k-1)k=1,2,…
(5)
(6)
式中:xm(k)为模型的状态向量;A,B,C为模型状态方程的系数矩阵;ym(k)为模型输出部分。
(3)校正误差:由于外部和自身的影响,通过预测得到的结果存在误差是不可避免的,将误差校正为如式(7)所示的情况,以表示预测输出和实际输出之间的误差:
e(k+p)=…=e(k+1)=e(k)=y(k)-ym(k)
(7)
式中:y为被测系统的输出值。
(4)参考轨迹:给出一个参考轨迹,并找到一种控制律,如式(8)所示,使得在该控制律内被控信号能够跟踪参考轨迹:

(8)
(5)滚动优化:通过对跟踪误差和对控制输入的计算,得到一个最优指标,使系统输出的最优过渡会尽可能接近参考轨迹:

(9)
式中:M为控制时域;参数qi允许强调每个受控输出及其预测;rj为衡量控制输入的性能。
2.3 驱动系统设计的原理框图
本驱动系统原理框图如图4所示。从图4可以看到,NPC三电平逆变器、模型预测控制器以及PI设计等构成了该驱动系统。
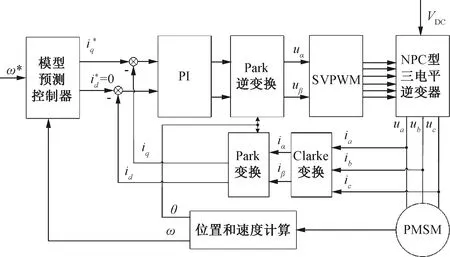
图4 驱动系统原理框图
2.4 控制器设计
由于系统的阻尼比较小,所以将D视为0处理,式(3)可以重新构建如下:
(10)
由于MPC的预测模型需要为离散形式,所以将式(10)离散化,得到:

TLcos[θrm(k)]}
(11)
式中:Ts为速度环采样周期。通过MPC模型得到的速度预测的离散方程,可以由式(11)得出:
ω(k+1)=ω(k)+TsF{iq(k),θrm(k),
TLcos[θrm(k)]}
(12)
式中:F[·]是包含非线性分量的控制项函数向量。
参考轨迹:
(13)

误差矩阵如下式:
E(k)(P×1)=[e(k)…e(k+P)]
(14)
式中:e(k)=ω(k)-ωm(k)表示电机的实际速度ω(k)与通过MPC预测得到的速度ωm(k)之间的误差。
预测将来行为的第itd步,参考轨迹的转速ωr(k+i)与电机实际转速ω(k+i)之间的差值如下式:
ωr(k+i)-ω(k+i)=ωr(k+i)-
ωm(k+i)-e(k+i)
(15)
为了使上述值最小,建立求解式:

(16)
那么,可以通过求解式(17)来获得在kth步的最优参考电流iq*:
(17)

最后采用牛顿迭代法来寻找式(17)的最小值。其中一次迭代如下式:
(18)
式中:n为在每一步预测中的迭代次数。
为了提高MPC方法的抗干扰性能,在速度控制器中除了MPC反馈部分外,还引入了对干扰的前馈补偿部分。ESO作为一种干扰估计技术被引入速度控制系统。图5为MPC+ESO控制器的原理框图。
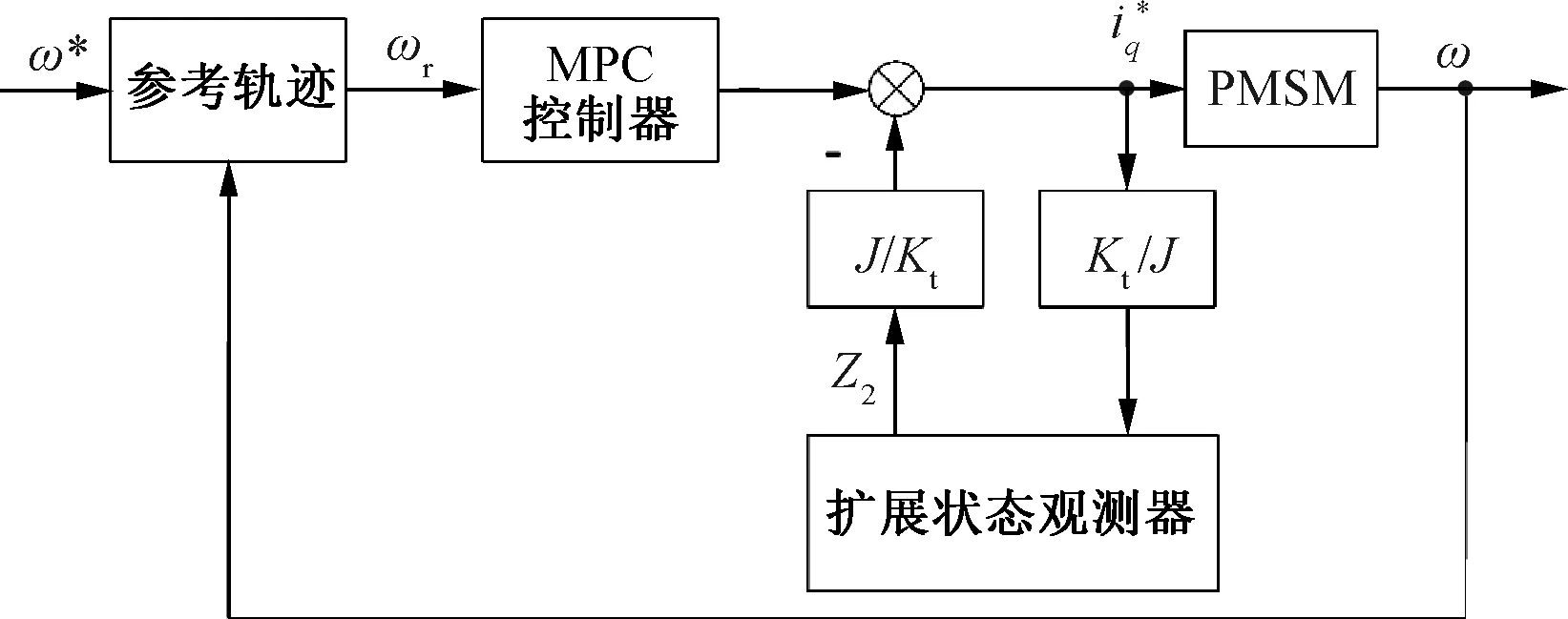
图5 MPC+ESO原理框图
由图5可得,MPC+ESO控制器的输出为ω。考虑到扭转力矩和系统扰动,永磁同步电机的机械运动方程可以表示:
(19)

(20)
式中:d(t)表示系统集总扰动。因此式(19)可以表示:
(21)
令x2=d(t)为扩展的状态量,c(t)为扰动的变化率。因此式(20)可扩展:
(19)

(20)
式中:-p为扩展状态观测器的极点,并且p>0;z1为速度ω的估计值;z2为系统集总扰动d(t)的估计值;根据文献[24],z1(t)→ω(t),z2(t)→a(t)。基于此信息,可以实现干扰补偿。
借助于ESO,系统的不确定性和干扰可以被及时估计和补偿,这有利于反馈控制提高调节能力。
三电平逆变器可以产生27个电压矢量,其中对中点电压能产生影响的是小矢量和中矢量,小矢量又可以分为正小矢量和负小矢量,这两种小矢量对中点电压的影响是恰好相反的,正负小矢量的中点电流如表2所示。本文通过调整正负小矢量的作用时间,抵消正负小矢量对中点电压的影响,以平衡中点电压。
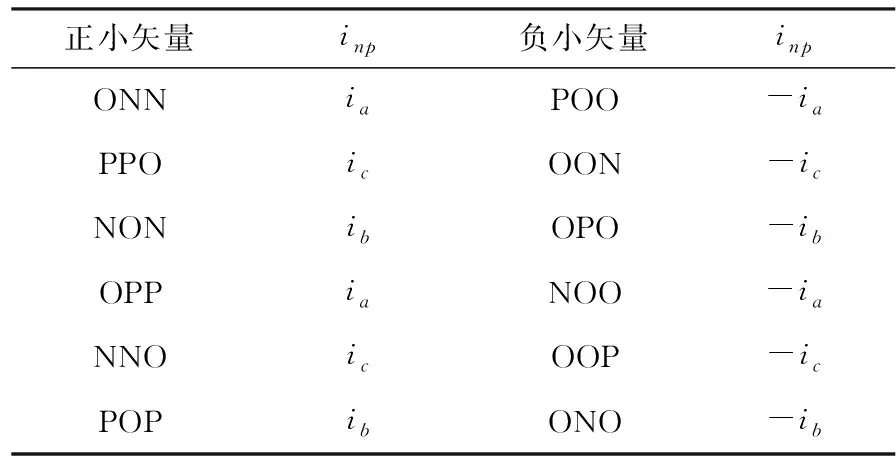
表2 小矢量对应的中点电流
通过引入时间因子k,令负小矢量的作用时间为(1+k)T1/2,那么相应的正小矢量的作用时间为(1-k)T1/2。给中点电压设置一定的滞环区间[-d,d],当中点电压超出该区间时,通过改变k值来调整正负小矢量的作用时间,抵消正负小矢量对中点电压的影响,以此达到平衡中点电压的目的。且由于在位置稳定的时候,中点电压的大小主要是由电容值的对称性决定的,为了简化计算量,没有采用复杂的控制算法。
3 仿真研究
本文用MATLAB/Simulink仿真工具搭建了摆臂结构控制系统,以验证控制方法的可行性。在仿真工具中搭建的控制系统参数:永磁同步电机的额定功率为750 W,额定转矩为2.39 N·m,额定电流为3 A,额定转速为3 000 r/min,峰值转矩为7.17 N·m,峰值电流为7.2 A,电机磁链为0.111 Wb,线电阻1.3 Ω,线电感7.5 mH,转子转动惯量为2.7×104kg·m2,电源电压为150 V(DC),直流侧两个电容容值均为500 μF。
本文的仿真研究主要分为两个部分:第一部分是通过对PI,MPC以及MPC + ESO三种算法的位置和速度曲线进行对比,验证MPC+ESO控制算法的有效性;第二部分是对MPC+ESO控制算法下的中点电压进行监测,验证滞环控制对中点电压的平衡效果。
图6为指定位置为90°时,采用速度环PI控制算法得到的位置和速度曲线。此时,位置环Kp=50,Ki=0,速度环Kp=1.5,Ki=12。不难看出,在该算法下,电机的到位情况比较差,实际位置和位置指令之间存在1.7°左右的稳态误差,且相应的,实际转速和转速指令之间一直存在1.5 r/min的转速误差,试图把电机的位置提到指令位置。
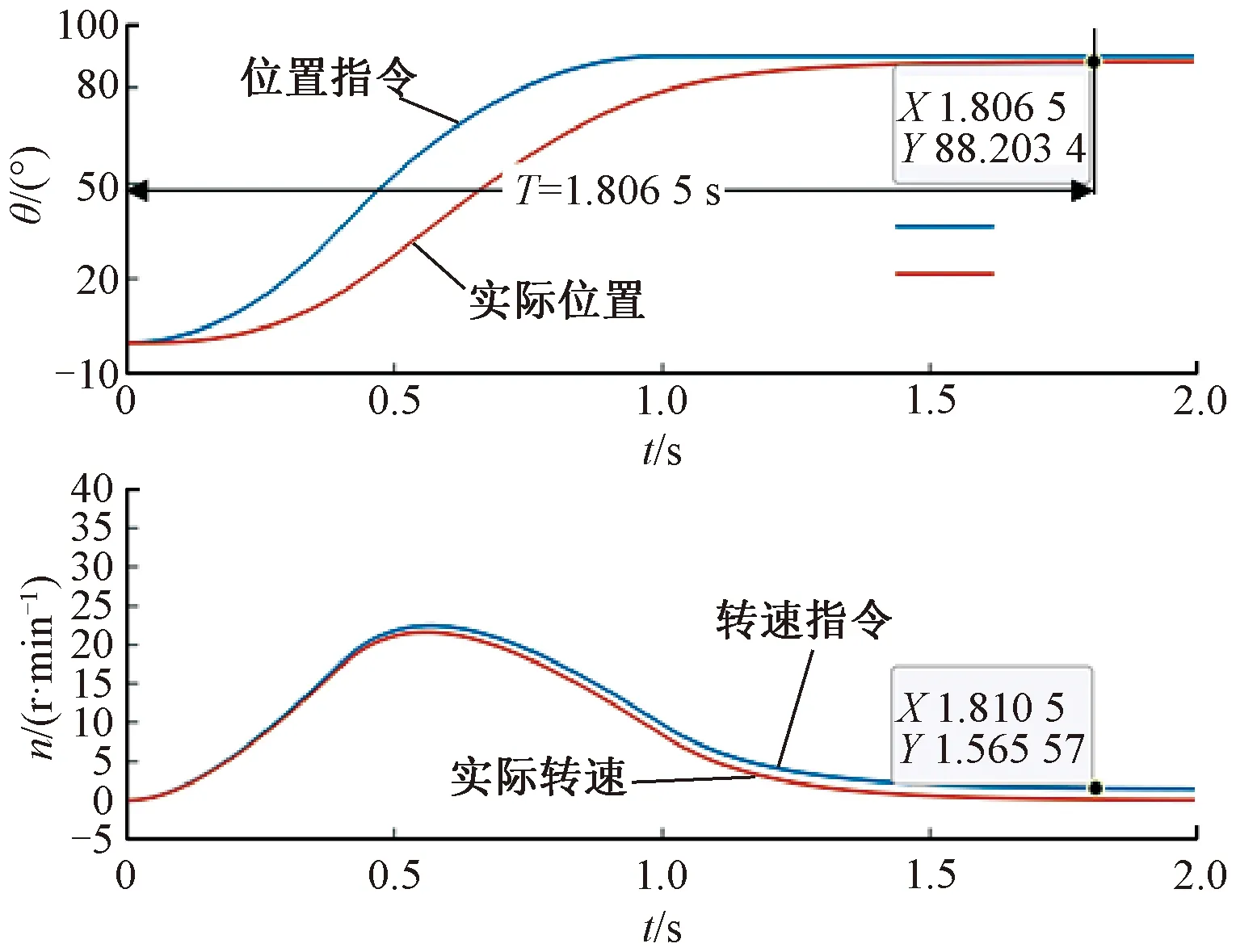
图6 PI的位置和速度曲线
图7为指定位置为90°时,采用MPC控制算法的情况下,得到的位置和速度曲线。可以看出,与图6的PI算法对比,MPC算法的到位时间T为1.2 s左右,而PI算法为1.8 s左右,MPC算法的到位更快,提升了系统的动态性能。

图7 MPC的位置和速度曲线
图8为指定位置为90°时,采用MPC+ESO控制算法的情况下,得到的位置和速度曲线。与图6的PI算法对比可以看出,MPC+ESO的控制算法不仅在到位精度上消除了稳态误差,且速度跟踪效果在整个控制过程中都比较好。与图7的MPC算法对比可以看出,在使用ESO估计系统扰动的情况下,MPC算法提高了到位精度,几乎不存在稳态误差。速度跟踪的效果也变好了,实际转速和转速指令之间的误差被消除了。

图8 MPC+ESO的位置和速度曲线
图9为MPC+ESO控制算法下的中点电压。理想情况下,当直流侧两个电容的容值完全相等时,可以看到,通过滞环控制,中点电压被平衡在0左右,可以保证逆变器的正常运行。但是在实际情况中,直流侧两个电容的容值不可能保证完全相等。因此在仿真工具中更改一个直流侧电容的容值以模拟真实情况,得到容值不相等时的中点电压曲线。可以看出,当两个电容的容值不相等时,中点电压会存在恒定偏置。
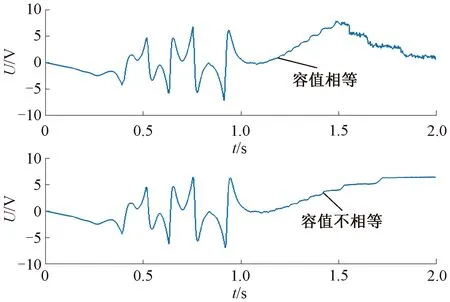
图9 MPC+ESO的中点电压
4 实验验证
本文搭建了由永磁同步电机构成的实验平台,验证控制方法的可行性和性能,实验平台如图10所示。
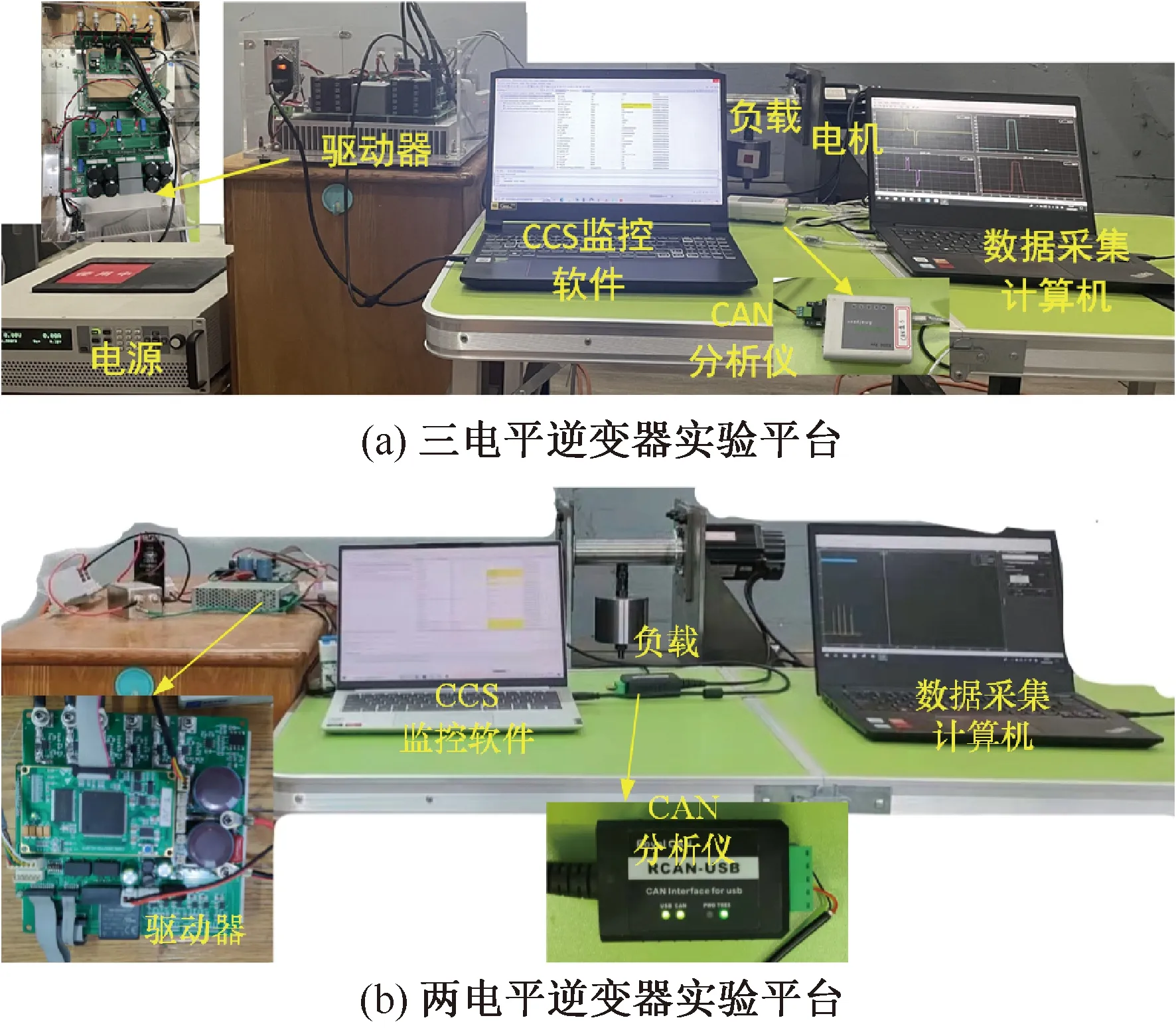
图10 电机控制系统实验平台
实验平台主要由以下几个部分组成:电机、负载、电源、CCS监控软件、驱动器、数据采集计算机。其中驱动器为基于TI公司的数字处理器芯片TMS320F283789设计的硬件平台,转子的实际位置通过16位旋变解码芯片反馈给驱动器。图10(a)为三电平逆变器驱动的实验平台,采用的IGBT型号为Infineon公司的F3L75R07W2E3_B11。图10(b)为两电平逆变器驱动的实验平台,采用的IGBT型号为Infineon公司的FS50R07W1E3_B11A。使用CAN分析仪对实验过程中实验平台的各项参数进行采集,并在MATLAB/Simulink仿真平台中搭建虚拟示波器,对采集到的数据进行更直观的显示。
实验中直接驱动负载使用的永磁同步电机,其参数和仿真设定的一致。本文的实验验证分为三个部分:第一部分通过给定位置指令90°,让负载从0运动到90°,观察电机的到位精度以及速度跟踪情况;第二部分通过给定位置指令1 800°,让电机驱动负载转动5圈,观察算法的可靠性和稳定性;第三部分为对比两电平逆变器驱动和三电平逆变器驱动情况下的电流谐波分量。
图11为采用PI控制的到位精度测试。此时,位置环Kp=50,Ki=0,速度环Kp=1.5,Ki=12。从图11(a)的位置曲线可以看出,PI控制算法在到位的过程中,电机实际位置与指令位置之间存在0.2°左右的误差。观察图11(a)的速度曲线可以看到,电机的实际转速和转速指令之间一直存在较大误差,说明转速动态响应速度较慢,影响了电机的到位精度。图11(b)是采用PI控制时的电流和NPC三电平逆变器的中点电压。可以看到,电流的响应速度较快,且中点电压由于直流侧两个电容容值不相等,导致存在8 V左右的恒定偏置,属于合理范围内。

图11 采用PI控制的到位精度测试
图12为采用MPC控制的到位精度测试。对比图11(a)和图12(a)的位置曲线可以看出,MPC控制算法相比较于PI控制算法,提高了系统的动态性能,缩短了电机的到位时间。但是在到位精度上,MPC控制算法存在1°的稳态误差。从图12(a)的速度曲线可以看出,实际转速虽然在运动初期跟踪转速指令的效果很好,但是位置环存在稳态误差,导致最后实际转速与转速指令之间存在7.5°左右的转速误差。图12(b)是采用MPC控制时的电流和NPC三电平逆变器的中点电压,摆臂是个负载时变结构,在运动过程中,电流曲线存在比较小的振荡。
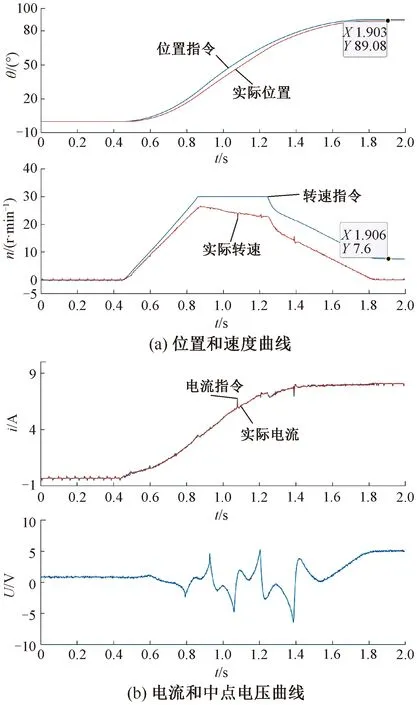
图12 采用MPC控制的到位精度测试
图13为采用MPC+ESO控制的到位精度测试。对比图13(a)和图11(a)的位置曲线可以看出,MPC + ESO控制算法与PI控制算法相比较,MPC + ESO提高了系统的动态性能,缩短了电机的到位时间。对比图13(a)和图12(a)的速度曲线可以看出,采用MPC + ESO的控制算法,在加入ESO来估计系统扰动,并且在速度控制器中引入了对干扰的前馈补偿部分的情况下,电机的实际速度在整个运动过程中跟踪转速指令的效果都很好。在电机驱动系统中,速度环是位置环的内环,内环能决定外环的控制效果,因此对比位置曲线可以看出,速度跟踪的精度提高后,位置跟踪的精度也对应提高了,系统的稳态误差被消除了,到位误差只有0.01°,几乎可以忽略不计。

图13 采用MPC+ESO控制的到位精度测试
图14为采用MPC + ESO控制的稳定性实验。在该组实验中,通过给定1 800°的位置指令,使电机驱动摆臂结构转动5圈,来观察系统在重复运动过程中的稳定程度。从图14的速度曲线可以看出,电机的实际转速在转速指令曲线附近有小幅度的振荡。且从电流曲线可以看出,在运动5圈的过程中,电流以正弦波的方式周期性变化。不难看出,MPC+ESO控制算法的可靠性和稳定性可以得到保证。

图14 采用MPC+ESO控制的稳定性测试
图15和图16为两电平逆变器驱动和三电平逆变器驱动的相电流及其所对应的FFT曲线。

图16 三电平的相电流和相电流FFT曲线
对比图15(a)和图16(a)可以看出,三电平逆变器驱动的定子电流纹波噪声更小,三电平逆变器的高频信号谐波更小。对比图15(b)和图16(b)可以更加直观地看出,三电平的电流谐波幅值更小。
5 结 语
本文针对大惯量的摆臂结构,采用NPC三电平逆变器驱动,以减小电流谐波,且采用滞环控制来平衡中点电压。针对传统的PI控制算法动态性能差的问题,在速度环中加入MPC算法提高系统的动态性能和鲁棒性。引入了ESO来估计集中扰动,并在速度环MPC中添加了基于估计扰动的前馈补偿项,改善了当系统存在强干扰的情况下MPC的控制效果。仿真和实验验证了本算法的有效性和稳定性。
