基于鳍射线效应手指结构的优化①
2022-12-15石如梦乔印虎
石如梦, 乔印虎, 李 博
(安徽科技学院机械工程学院,安徽 凤阳 233100)
0 引 言
自适应抓取不仅是柔顺和欠驱动机器手设计中一个有吸引力的话题,也是软机器人的主要应用领域之一。以前,夹持器通常是由刚性材料制成的钳口来夹持物体。刚性夹持器通常由一对对称爪[1]或多个刚性连杆和关节组成[2],结构简单但自由度有限,对不同形状物体的适应性较差。现在,将软组件结合到硬机器人中,由柔性材料制成的软夹具被用于夹持易碎的不规则物体。如装满颗粒状材料的气囊[3]、3D打印的气动夹持器[4]、电活性聚合物手爪[5]和形状记忆合金软体手[6]。这些软夹持器依赖于流体、温度或气压方式实现变形,在控制、驱动和材料方面都不通用,且制造和组装过程复杂。
鳍射线效应是生物学家LeifKniese发现的,其作用是基于鱼鳍的变形[7]。鳍射线结构有独特的形状适应,能抓取各种形状的物体[8]。范长湘等人通过优化鳍射线结构能对抓取目标形成很好的包络效果[9]。杨勇等人提出了一种受鳍射线效应启发的软夹持器,其整个结构由软材料进行3D打印,无需组装[10]。徐文福等人通过插入一系列刚性杆优化鳍状射线结构,可同时实现自适应抓握和内在力传感[11]。ShinJH等人提出了一种改进的鳍射线软夹持器,并设计了一个能在平行和中心握把之间切换的系统,扩展了工作几何形状[12]。
在本文中,介绍了优化后的鳍射线手指结构所产生的层干扰现象,并且基于这种现象改善了软手指结构的形状适应性和抓握性能。首先概述了鳍射线手指结构所采用的材料和其关键设计参数,其次建立手指结构的三维模型,利用ANSYS软件对手指模型进行分析,通过记录指尖位移和物体作用于不同手指结构产生的接触应力这些数据来进行量化对比。
1 优化手指结构的有限元分析条件
当一个物体压在鳍射线软手指上时,倾斜的肋变形并相互接触,由于变形肋之间的相互摩擦而造成层干扰现象(如图1(a))。在这种堵塞状态下,手指结构的整体刚度增加,导致力响应梯度变化。鳍射线手指受益于初始接触时最小的接触力,这是在适应柔软目标时所期望的,而需要更大夹持力抓握物体时,也可以实现更高的力。为充分利用这种层干扰现象的好处,需要优化鳍射线手指结构,以最大限度地提高堵塞状态下肋骨之间的接触。
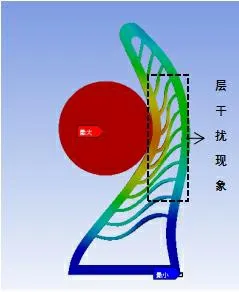
(a)层干扰效应示意图
鳍射线手指结构选用肖氏硬度为85A的TPU材料,其杨氏模量为16MPa。如图1(b)所示,手指结构的高度为60mm,基宽为24mm,接触面厚度为a,肋的数量为q,肋的厚度为t,初始肋角为θ以及连续肋之间的角度增量为α。采用ANSYS软件对手指结构进行仿真,在仿真中,固定手指底部,使一个直径为20mm的圆形物体向手指方向移动15mm,模拟记录物体压在手指上导致柔性手指结构变形而产生的尖端位移和反作用力。
2 有限元分析结果
2.1 接触面厚度和肋的数量变化
首先确定手指接触面的厚度和肋的数量,为公平地比较所有模拟的结构变化,使所有肋的厚度相等且平行。肋的数量从12根~15根变化,增量为1根。接触面厚度从0.6mm~2.4mm变化,增量为0.6mm。如图2所示,随着肋数量的增加,施加在手指上的应力增加,尖端位移减小。肋数越多肋之间的接触越多,但手指结构的适应性差。随着接触面厚度的增加,尖端的位移量越大,当接触面厚度为1.8mm时,手指尖端的位移量最大。因此,接触面的厚度为1.8mm和12根肋的手指结构更适合。
2.2 肋厚度变化
肋的厚度对应手指的整体刚度,厚度从0.6mm~1.8mm变化,增量为0.6mm。如图3所示,物体沿X轴正方向移动到15mm时,肋厚为1.8mm的结构尖端沿X轴移动了9.4mm,而肋厚为0.6mm的结构尖端位移仅有3.0mm。由于物体位移被手指结构吸收,因此在X轴上的位移量越少意味着适应性越好。同样,肋厚为1.8mm的结构沿Y轴向物体移动了3.1mm,而肋厚为0.6mm的结构向物体移动了4.3mm。在这种情况下,需要更多的向Y轴负方向移动,这意味着手指尖端在物体上的闭合,推动手指沿X轴负方向移动。图3还包括结合肋厚为0.6-1.2mm和肋厚为1.2mm手指结构的尖端位移。可以看出,增加肋的厚度对尖端位移的影响不明显。尽管增加肋厚可以增加接触应力,但沿两个轴所需的被动适应随之减少。
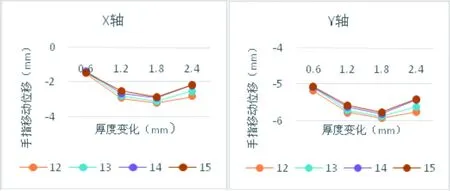
图2 肋数和接触面厚度变化对手指指尖位移的影响

图3 肋厚度变化对手指指尖的位移影响
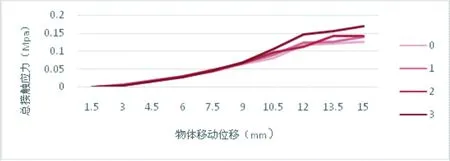
(a)初始肋角度为25°,肋之间角度变化的总接触应力
2.3 接触应力
保持所期望的被动适应的同时增强力的产生是通过调整肋的角度来优化层干扰现象。将肋向被抓取的物体倾斜会产生一个优选的弯曲方向,这会提高抓取性能。图4(a)显示四个手指的接触应力,其t=0.6mm,θ=25°,但每个肋之间的角度都遵循从0°到α=3°不同的角度增量。观察到,通过引入角度增量在肋之间,在物体移动9mm前,初始接触应力基本不变,层干扰后的接触应力发生变化。当α=3°时,在15mm位移末端的最终合力比肋之间没有角度增量的同一手指约高35%。
此外,图4(b)表明物体刚接触手指和最终移动15mm时产生的接触应力。初始肋角从10°~25°变化,增量为5°。初始肋角为10°,15°和20°的手指最终接触应力是在0.12~0.15MPa区间波动,而θ=25°的手指最终接触应力是逐渐增加的。增加肋之间的角度增量,有助于在初始接触时最小化接触应力,这是与精细目标交互时所需要的。如前所述,增加肋之间的角度增量可以提高最大接触力,还具有进一步降低初始接触力的好处。因此,具有θ=25°和α=3°的手指将在层卡紧后有增强力的产生,同时在层卡紧前最小化初始接触力。
2.4 被动适应
图5显示θ=10°,角度增量从0°~3°变化的手指尖端沿X轴和Y轴的位移量。观察到手指尖端沿X轴移动,与物体刚接触时,指尖沿物体移动的方向被推动,随着手指结构的变形和适应外部物体,其值较大。并且具有较大角度增量的手指能更好地适应外部物体,当α=3°时,手指尖端甚至移动到X轴负方向。在物体移动13.5mm时,α=3°的手指尖端与α=0°的相比向物体方向移动了近2.5mm。此外,在层干扰之后,由于手指结构硬化,所有手指都无法进一步适应物体,因此,整个手指在物体移动的方向上发生移动。手指尖端沿Y轴方向移动,增加肋之间的角度增量也能改善沿Y轴的形状适应,尽管沿Y轴的形状适应小于沿X轴的。在物体移动15mm时,α=3°的手指尖端与α=0°的相比,向物体移动了近1mm。总之,增加角度增量有利于手指的形状适应,指尖可以进一步靠近物体。
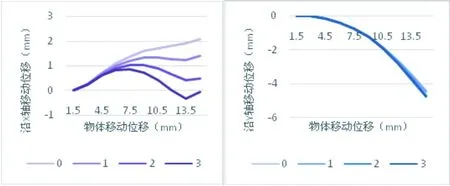
图5 初始肋角为10°,角度增量变化对手指指尖位移的影响
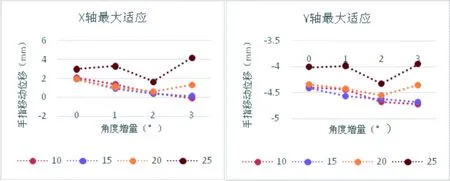
图6 物体移动15mm时,初始肋角和角度增量变化对手指指尖位移的影响
图6显示物体移动15mm时,改变肋的初始角度和肋之间的角度增量对指尖位移的影响。观察到,θ=10°和θ=15°的手指结构尖端沿X轴方向移动的位移量基本重合,并且比其他手指结构移动的位移量都小。同样,它们沿Y轴方向移动的位移量也相差不大,并且比其他软手指结构移动的位移量都大。综前所述,θ=15°,α=3°的软手指结构的初始接触应力最小,因此,θ=15°,α=3°的软手指结构,可以实现最佳的整体适应。虽然倾斜的肋为手指结构创造了一个优选的弯曲方向,但过度倾斜的初始角度对手指的形状适应有不利影响。
3 结 论
优化后的手指结构,表现出一种被动加强机制,该机制由倾斜的肋之间的层干扰现象促进的。首先确定肋数为12、肋厚度为0.6mm以及接触面厚度为1.8mm作为手指的框架结构。其次改变初始肋的角度,在变形肋之间,初始接触应力减少,最终接触应力在0.12MPa~0.17MPa范围波动,同时略微改善所需的被动适应。最后通过在连续的肋之间引入角度增量,当θ=25°,α=3°的手指结构在硬化后将接触力提高了35%。θ=10°,α=3°的手指结构与没有角度增量的同一个手指结构相比,沿X轴向被抓物体移动的最大尖端位移提高了近2.5mm,沿Y轴提高了1mm。虽然,希望肋朝向接触表面倾斜,但减小初始肋角度会减小初始接触力并有助于改进沿Y轴的被动适应。θ=15°,α=3°的手指结构可以实现最佳的整体适应。
