基于有序统计和最大参考单元选择的CFAR算法①
2022-12-15茆星宇刘贵如王陆林
茆星宇, 刘贵如, 王陆林, 李 铮
(1.安徽工程大学计算机与信息学院,安徽 芜湖 241000;2.芜湖易来达雷达科技有限公司,安徽 芜湖 241000)
0 引 言
车载毫米波雷达通过发射线性调频连续波信号,检测目标信息。先将发射信号与接受信号混频,得到差拍信号。然后经过快速傅里叶变换等处理,得到距离-多普勒矩阵。最后通过恒虚警检测器(Constant false alarm rate,CFAR),检测目标的位置和速度信息。经典的CFAR检测器包括单元平均CFAR (Cell Averaging CFAR,CA-CFAR)[1],其在均匀环境下有良好的检测性能,但不适用于非均匀环境。之后在此基础上提出了SO-CFAR[2]和GO-CFAR[3]。后续的研究,一是引入一种策略剔除干扰目标[4,5]。二是将CA-CFAR应用于非高斯分布的杂波背景模型[6,7]。三是将CA-CFAR应用于自适应CFAR检测器,这类检测器可以根据背景环境自适应选择合适的处理算法[8,9,10]。除了均值类CFAR检测器外,另一类CFAR检测器包括有序统计CFAR (Ordered Statistics CFAR,OS-CFAR)[11]。OS-CFAR在有干扰目标的环境中保持良好的检测性能,但在杂波边缘环境下虚警率较高。一种改进方式是通过判别分析自动有效的估计合理的k值,从而提高OS-CFAR的性能[12]。为解决OS-CFAR在杂波边缘环境中虚警率偏高的问题,提出一种基于有序统计和最大参考单元选择的CFAR算法。通过将参考窗分为若干个子参考窗,在每个子参考窗内排序并选择第k大的值。然后从筛选出的值中选择最大的值,并乘以门限因子得到检测门限。改进的CFAR检测器既能剔除一定数量的干扰目标,又能抑制杂波边缘环境下的虚警率。
1 CFAR检测器
假设背景功率模型服从高斯分布,经过平方律检波器后,概率密度函数(Probability Density Function,PDF)服从指数分布如式(1):
(1)
式(1)中,μ为参考单元x的背景噪声功率估计值,可记为式(2):
μ=μt(1+σI+σC)
(2)
式(2)中,μt为热噪声功率估计值,σI为干扰噪声比(interference-to-noise ratio,INR),σC为杂波噪声比(clutter-to-noise ratio,CNR)。
1.1 OS-CFAR检测器

图1 OS-CFAR原理图
OS-CFAR原理如图1所示。OS-CFAR检测器先对参考窗中的参考单元排序,然后选择功率第k大的参考单元,并乘以门限因子αOS得到检测门限。为使OS-CFAR保持恒定的虚警率Pfa,OS-CFAR的门限因子可得式(3):
(3)
式(3)中,Γ(·)表示伽马(Gamma)函数,N为参考窗中的参考单元数,k一般取值为3×N/4。
如果待测单元大于检测门限,则待测单元存在目标H1;反之,则待测单元不存在目标H0。如式(4)所示:
(4)
1.2 改进的CFAR检测器
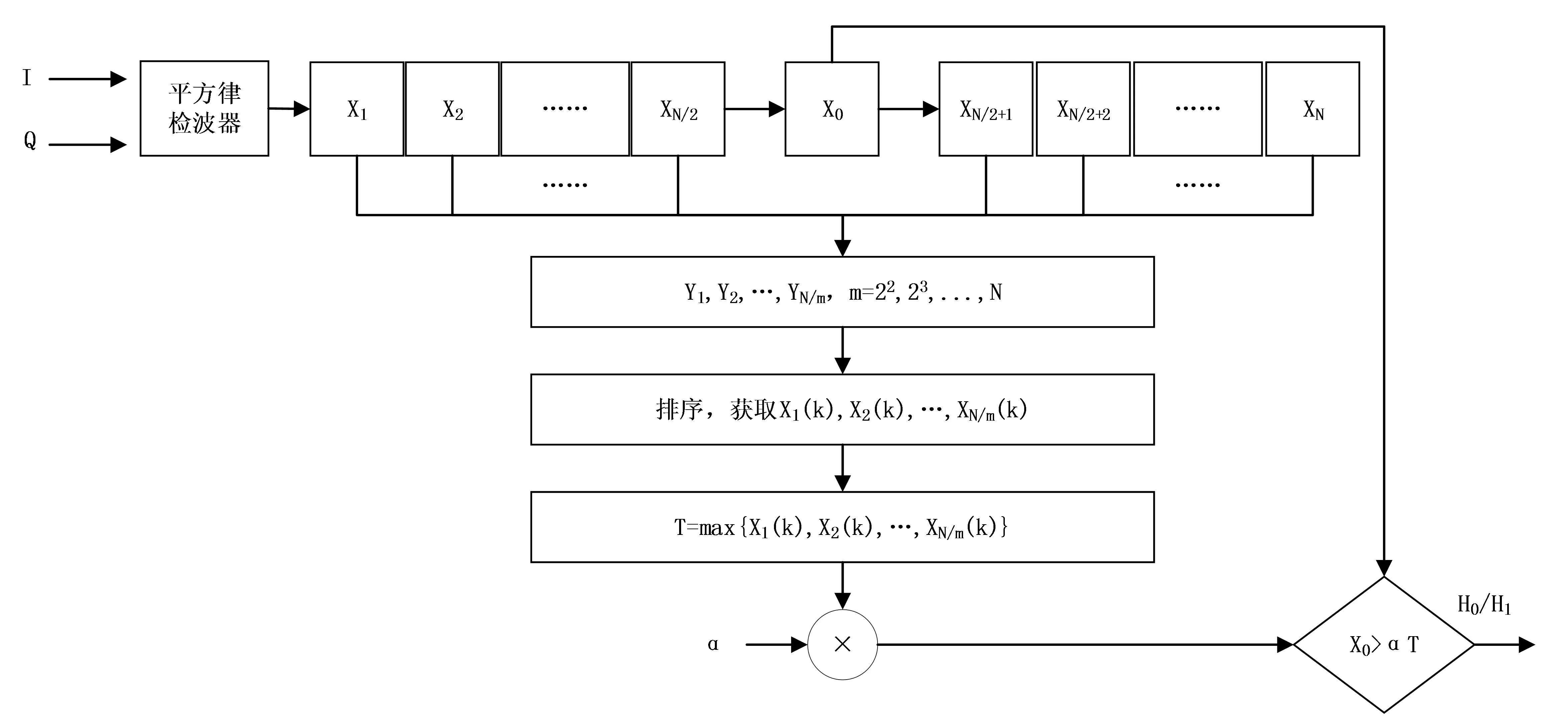
图2 改进的CFAR原理图
改进的CFAR原理如图2所示。改进的CFAR检测器先将参考窗分为N/m个子参考窗Yi,i=1,…,N/m。如式(5)所示:
Yi={X(i-1)·m+1,X(i-1)·m+2,…,Xi·m}
(5)
式(5)中,m为子参考窗中的参考单元数,取值为22,23,…,N。
然后在每个子参考窗Yi,i=1,...,N/m内,对各子参考窗包含的参考单元排序,如式(6)所示:
(6)
最后从每个子参考窗的第k大的值Xi(k),i=1,...,N/m中,选择功率最大的参考单元作为对背景功率水平的估计T,如式(7)所示,乘以门限因子α得到检测门限αT,与待测单元X0比较。门限因子α的值由2.1节所述的方式确定。当待测单元大于检测门限时,待测单元存在目标H1;反之,待测单元不存在目标H0。
T=max{X1(k),X2(k),...,XN/m(k)}
(7)
式(7)中,k取值为3·m/4。
2 仿真实验
2.1 设置参数
设定参考窗中的参考单元数N为32,目标虚警率Pfa为10-4。为使改进的CFAR检测器保持目标虚警率,通过蒙特卡洛仿真得出不同m值时,目标虚警率Pfa对应的α值。如表1所示.

表1 不同m值时Pfa=10-4对应的α值
由于当k取值相同时,m=32的改进CFAR等同于OS-CFAR检测器。仿真实验包括OS-CFAR检测器,但不包括m=32的改进CFAR检测器。由式(3)和表1可得,当N=32且Pfa=10-4时,OS-CFAR的门限因子的值αOS为8.58,m=32的改进CFAR的门限因子α的值为8.50。仿真与公式的误差小于0.1,说明表1中的数据是较合适的。
2.2 均匀环境下的检测性能
均匀环境下各CFAR检测器的检测性能如图3所示。
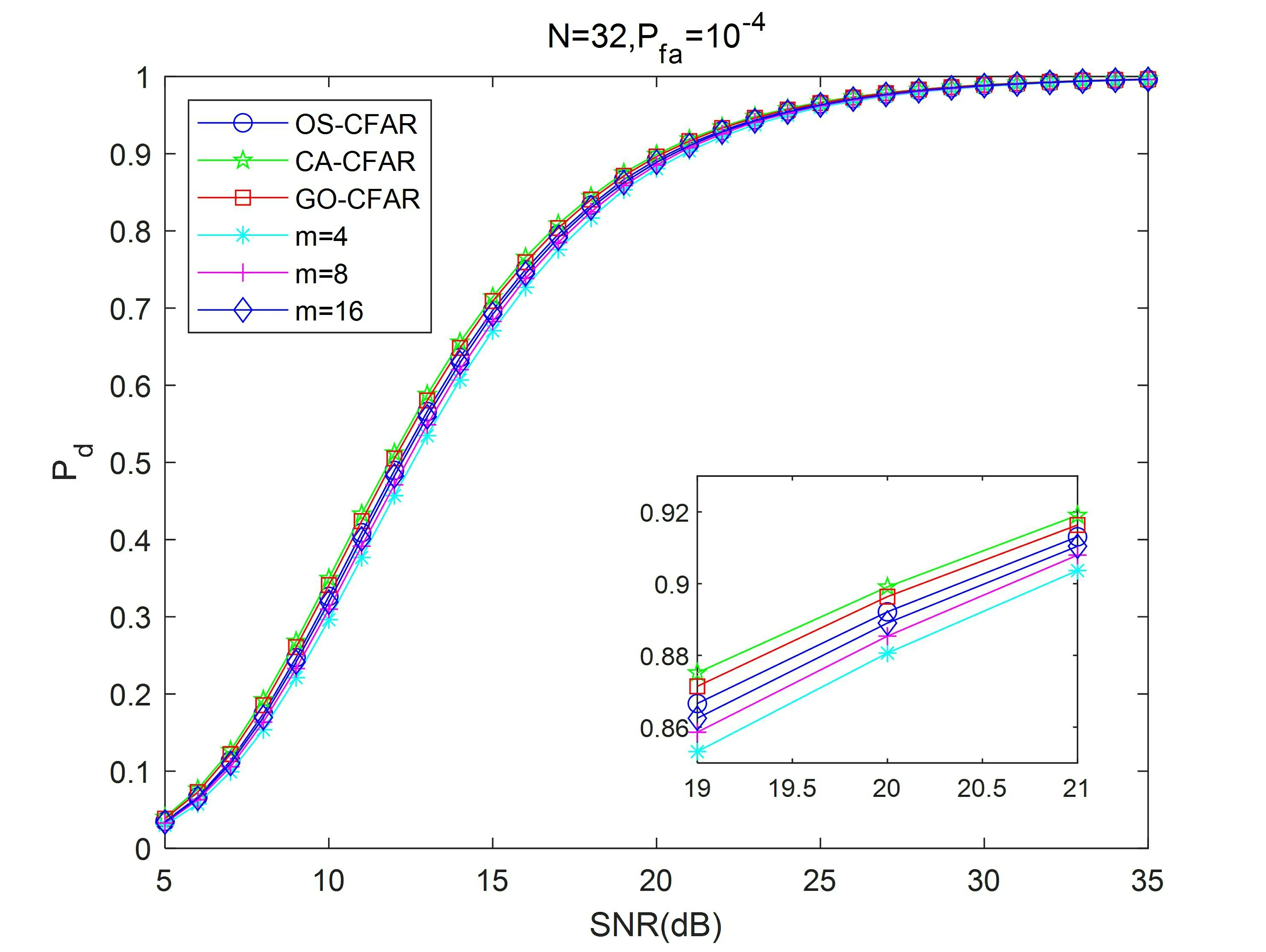
图3 均匀环境下CAFR的检测性能Pd
由图3可得,在均匀环境下,随着m不断增大,改进的OS-CFAR的检测性能不断提高。相比CA-CFAR,其他CFAR检测器在Pd=50%时CFAR损耗从高到低为:GO-CFAR:0.09dB;OS-CFAR:0.29dB;m=16:0.38dB;m=8:0.52dB;m=4:0.71dB。
2.3 干扰目标下的检测性能
假设干扰噪声比INR等于信号噪声比SNR。图4和图5分别显示了左右窗口各一个或两个干扰目标的环境下,各CFAR检测器的检测性能。
由图4可得,在左右窗口各一个干扰目标的环境下,随着m不断增大,改进的CFAR的检测性能不断提高。当m=4,8和16时,改进的CFAR的检测性能略低于OS-CFAR,但优于CA-CFAR和GO-CFAR。当INR=SNR=20dB时,相比OS-CFAR,改进的CFAR的检测性能差异由低到高为:m=16:0.43%;m=8:1.26%;m=4:2.57%。

图5 左右窗口各两个干扰目标下CAFR的检测性能Pd
由图5可得,在左右窗口各两个干扰目标的环境下,随着m不断增大,改进的OS-CFAR的检测性能不断提高。其中,m=4和m=8的改进CFAR检测器性能下降明显,说明了子窗口长度越小,改进CFAR检测器的抗干扰能力就越弱。
2.4 杂波边缘环境下的检测性能
模拟的杂波边缘环境是参考窗从噪声区域(含杂波参考单元数为0时)移动到杂波区域(含杂波参考单元数为N时)。当含杂波参考单元数为N/2+1时,待测单元正好位于杂波区域,此时CFAR检测器的虚警率最高,即虚警峰值。图6显示了CNR=5dB时,改进的CFAR与OS-CFAR,CA-CFAR,GO-CFAR的虚警率。

图6 杂波边缘环境下CFAR的实际虚警率Pfa
由图6可得,当待测单元位于噪声区域时(含杂波参考单元数小于N/2),改进的CFAR的虚警率低于OS-CFAR,高于CA-CFAR和GO-CFAR。当待测单元位于杂波区域时(含杂波参考单元数大于N/2),改进的CFAR的虚警率低于OS-CFAR和CA-CFAR,略高于GO-CFAR。另外,相比m=16,大多数情况下m=4和m=8的改进CFAR检测器的虚警率更低。
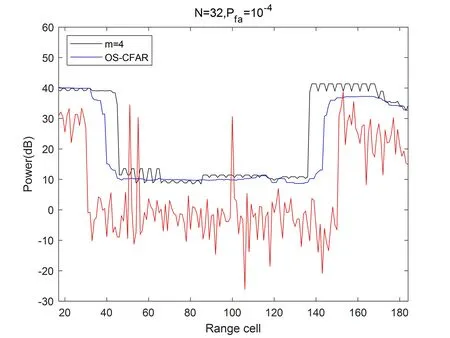
2.5 复杂环境下的检测门限
图7模拟了在距离维上改进CFAR和OS-CFAR检测器的检测门限。在模拟的场景中,在1-200的距离单元内存在3个真实目标,其位置分别在51,55和100,且信噪比为30~35dB。另外,在30和150的距离单元处分别存在CNR=-30dB和CNR=30dB的杂波边缘过渡。图7(a),(b)和(c)分别给出了13-188的距离单元内,m=4,m=8和m=16的改进CFAR与OS-CFAR检测器在目标虚警率Pfa=10-4时的检测门限。
由图7可得,改进的CFAR和OS-CFAR都检测到了三个真实目标。但是,m=16的改进CFAR和OS-CFAR在150的距离单元处存在虚警。由图7中的检测门限可得,改进的CFAR比OS-CFAR检测器更能抑制杂波边缘处的虚警,并且m值越小,改进的CFAR对杂波边缘处虚警的抑制效果越好。这与2.4中的结论是一致的。
(a)
综合各种环境下的仿真实验,子参考窗的理想长度应为8或16,此时,改进的CFAR在均匀环境、多目标环境和杂波边缘环境下的综合效果最优。
3 结 语
提出一种基于有序统计和最大参考单元选择的CFAR算法,通过将参考窗分成若干个子参考窗,然后在每个子参考窗内采用OS-CFAR的策略选取一个合适的值,最后从这些值中选取最大值用于生成检测门限。仿真实验表明,相比OS-CFAR检测器,改进的CFAR牺牲了一些在均匀环境和多目标环境下的检测性能,有效的降低了杂波边缘环境下的虚警率。
