基于人机交互的上肢外骨骼训练康复机器人路径规划
2022-12-11谭荣斌鲁守银徐伟杰周大鹏
谭荣斌,鲁守银,徐伟杰,周大鹏
(山东建筑大学,济南 250101)
0 引言
WHO统计的2016年全球前十位死亡原因中显示中风排列位居第二,在全球范围内属于第二大致死原因,我国是全世界中风发病率最高也是死亡人数最多的国家,因此脑卒中患病后的康复在我国是亟需解决的问题。偏瘫患肢运动能动的康复训练可以看做一种重新学习或重新塑造的训练过程,高重复性、高强度、目标导向性的训练(或者功能性任务练习)可以提高患者患侧肢体能动能力的恢复[1]。康复训练机器人即用智能化的机械设备代替医师高标准、高精度的完成各项康复训练,提供稳定、可复制、可量化的康复动作,加速受损神经的重塑,并且准确、有效地评估患者恢复情况,有效的减少患者与康复医师之间的依赖[2],在当前医护人员逐渐老龄化,青壮年医护人员后备不足的大背景下大大降低了由于康复治疗医师不足的情况对偏瘫患者康复治疗造成的影响。
通常患后恢复共需经历软瘫期、痉挛期、康复期三个过程[3],在各时期分别通过被动训练、主被动训练以及主动训练加以治疗,对于患者而言最重要的即为患后初期患肢能动功能的恢复问题,通过被动训练科学的运动设计,全面的对患肢各部位进行运动刺激,稳定、缓慢的带动患肢做周期性运动,能够高效的促进患肢的能动功能的再次建立。
国外对外骨骼机器人的研究始于20世纪60年代。苏黎世联邦理工学院在2006年研制出了一种具有七个主动自由度和三个被动自由度的上肢康复机器人,并命名为ARMin系列[4],该机器人由一个升降装置进行支撑,通过升降机构的调整能够实现外骨骼初始高度的微调以适应不同体型的患者。美国亚利桑那州立大学在2005年研制了一种具有五个自由度的上肢康复机器人,并命名为RUPERT[5,6],该机器人主要创新点为人工气动肌肉驱动,相较于其他方式驱动,该方法对患肢具有更好的柔顺性,并在控制系统的复杂程度上进行了大大的改进。德克萨斯大学奥斯汀分校在2017年研制出了一种具有左右均为七自由度的双臂上肢康复机器人,命名为Harmony[7,8],每个关节均由伺服电机所组成的串联弹性执行器驱动,结合机械设计,该机器人具有广泛的运动空间范围。
国内哈尔滨工业大学的王东岩、李庆玲等人研制出了基于sEMG上肢动作辨识的五自由度上肢康复机器人[9,10],控制系统采用测量四处上肢肌体表面的肌电信号sEMG作为反向传播神经网络控制信号对机器人进行控制,后来研制了改进的七自由度上肢外骨骼机器人[11],深入研究了sEMG信号-关节角度间的预测算法,提取五个部位的信号作为算法输入值,以随机森林算法进行sEMG-关节运动角度预测,较之前有更快的反应速度。华中科技大学研制了基于气动肌肉驱动的三自由度上肢康复机器人,采用拮抗肌对的方式实现单关节的双向运动,后来研制出了基于人工气动肌肉和钢丝绳驱动的九自由度上肢外骨骼康复机器人[12]。
国内外研究的外骨骼机器人多为单臂外骨骼,通过力信号、肌电信号、脑电信号[13~16]等技术对患者运动意图进行预测并做出相应动作,但大多研究成果由于分类器的局限性只能实现有限的几组动作,对于偏瘫患者来说,只有患侧参与训练无法直观的反馈训练效果。为解决上述问题,设计了一种针对偏瘫患者的人机交互上肢外骨骼机器人[17,18],在被动训练全面的康复基础上通过人机协作的主被动训练,利用肢体与关节接触面的力传感器获取运动意图并对机械臂进行微调从而带动患肢进行针对性训练[19],不仅加强了患者主动意图的感知反馈,更加有利于神经系统的重塑,提高康复效率,大大增加了患肢运动范围与灵活性,并能时刻使患者通过自身的感觉感受康复训练效果。因此本文研究着重于人机交互的主被动训练方法。
以下部分将介绍主从式上肢外骨骼的结构设计、运动学与动力学建模以及控制设计[20]。
1 上肢外骨骼康复机器人
针对人体上肢的运动规律建立外骨骼模型并设计了五自由度上肢外骨骼机器人,分为肩关节的外展/内收、大臂俯/仰、肘部屈/伸、小臂内旋/外旋以及手腕外展/内收运动,为了防止训练过程中由于关节过运动导致人体受到伤害,在大臂俯仰关节、肘部旋转关节、肘部屈伸关节以及末端抓手设置限位开关,并且将各关节的运动范围进行设置:肩关节的外展/内收0°~90°/0°~45°;大臂俯、仰各0°~45°;小臂内、外旋各0°~45°;肘部屈/伸0°~90°/0°~20°;腕关节屈/伸各0°~45°,由于患者患肢可能为左侧或右侧,因此针对以上两类患者设置“左主右从”和“右主左从”两种不同的机型,以右臂瘫痪左臂健康患者为例,上肢外骨骼康复机器人整体结构如图1所示。
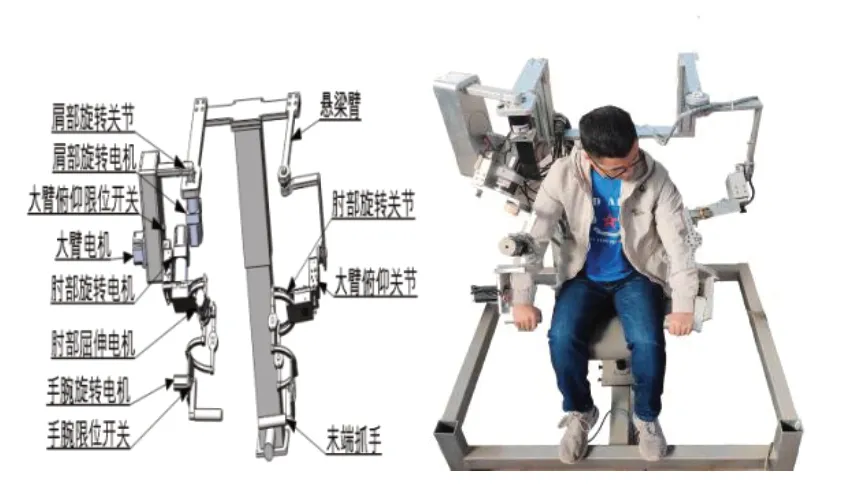
图1 上肢康复外骨骼机器人整体结构
主从臂的设置能够实现从健康侧到患侧康复训练动作的映射,而从臂还具有传感与驱动装置,能够实现被动训练,本文着重于被动训练过程中的人机交互训练研究。以从臂被动训练为例各关节驱动方式与结构如图2所示,其中(a)表示手部关节驱动结构,手柄通过电机A的转动带动患者腕关节的屈伸,根据人体腕关节活动范围设定相应的限位开关,防止手腕受到过运动带来伤害;(b)表示肘关节驱动结构,由一般人体模型得知手掌距肘部距离在35cm左右,因此图中电机B能够带动整个小臂绕肘关节转动;(c)、(d)与(e)所示为小臂内外旋驱动结构,由皮带首末端与弯轨两端固定,中部通过两个导向轮与电机C固连的转轮结合,当电机运行时,通过皮带传动使弯轨转动,从而实现小臂的内外旋;(f)为大臂俯仰驱动结构,通过电机D实现大臂在90°范围内实现俯仰运动;(g)与(h)为肩关节内外旋驱动结构,通过电机E实现肩部在90°范围内的回转运动。

图2 从臂各关节结构
通过上肢外骨骼机器人从臂D-H参数表,在MATLAB环境[21]下使用robotics toolbox工具箱建立连杆模型,并进行基于五次多项式插值算法的运动控制研究,通过SolidWorks导出的urdf文件,将连杆模型获得的数据在Simulink环境下进行可视化仿真[22,23]。
2 机器人模型建立与运动仿真
2.1 运动学分析
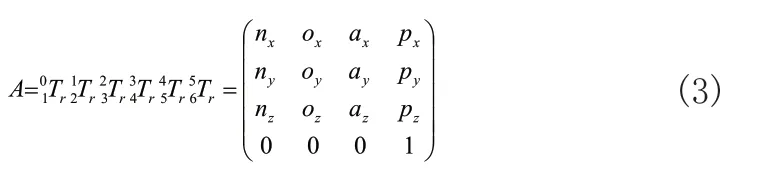
由于上肢外骨骼机器人左右机械臂对称,因此只以从臂为例分析其运动学模型[24,25]。以机器人悬梁臂为基坐标,将各关节坐标系原点位置置于每个关节的末端,通过D-H建模方法对肩关节、大臂、肘关节以及手腕进行建模,并得到各关节间的变换矩阵且基座标到末端抓手坐标变换矩阵A为:

其中,变换矩阵T将关节坐标系原点建立在关节的末端,由D-H法得到变换矩阵一般表达式如下:

式(2)中,di表示平移距离,αi表示扭转角,ai表示长度,θi表示关节角度,其中各关节D-H参数以及关节质量如表1所示。
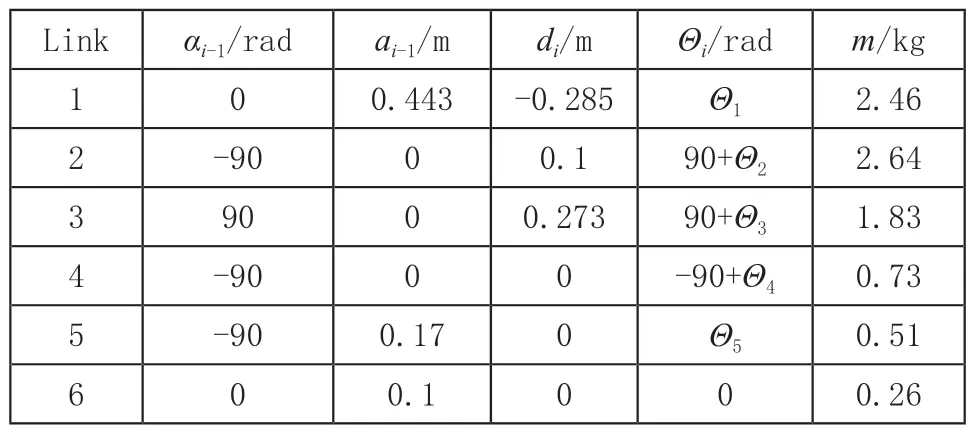
表1 上肢外骨骼机器人从臂D-H参数和关节质量
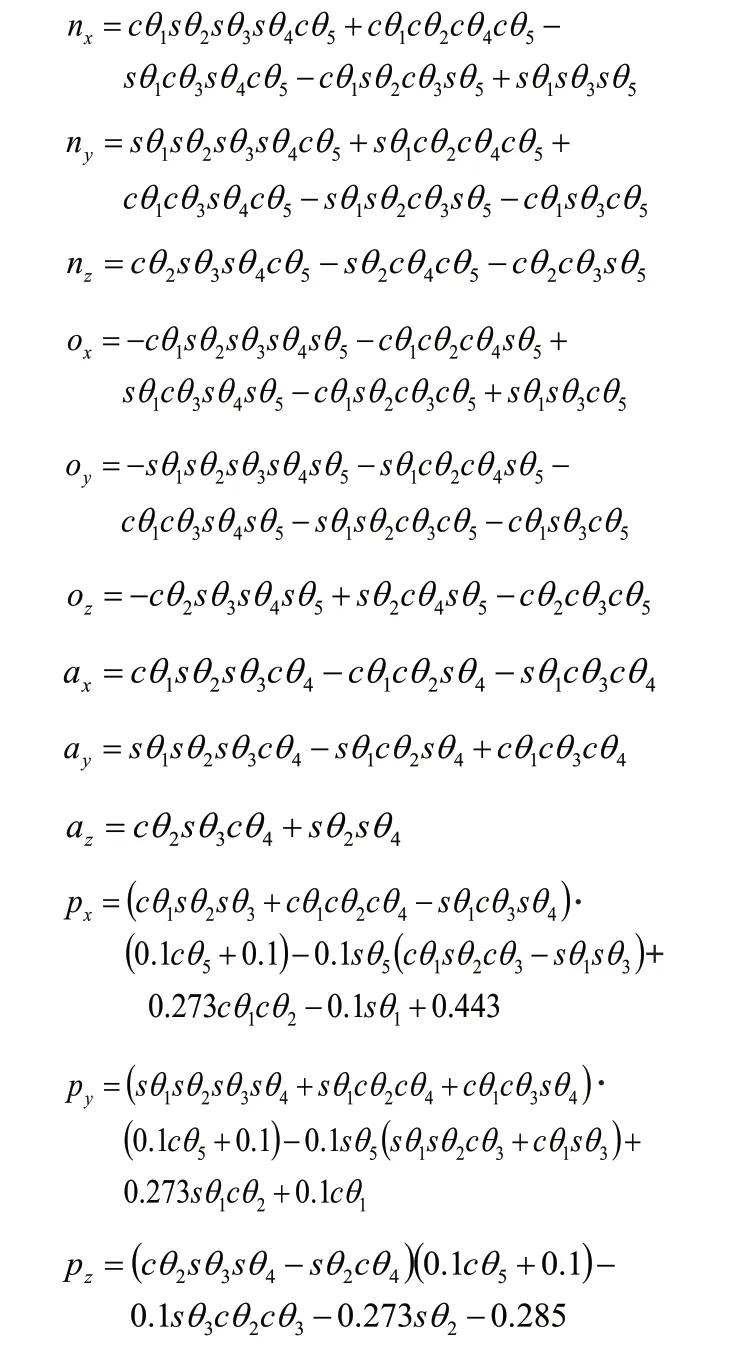
由关节变换矩阵的一般表达式以及各关节D-H参数可得基座标到末端抓手的坐标变换矩阵为:
其中:
2.2 动力学分析
通过拉格朗日动力学方程,建立如下机械臂动力学模型:

2.3 机器人模型建立与可视化仿真
由上肢外骨骼机器人从臂参数,建立改进D-H坐标系,五个关节均为转动关节,肩部旋转关节和大臂俯仰关节配合肘部屈伸关节确定末端抓手的参考位置,肘部旋转关节和手腕旋转关节配合确定手腕的方位,模型如图3所示;将运动学分析得出的结果,通过MATLAB的toolbox工具箱建立连杆仿真模型,通过各关节的活动范围各取30000个离散点得出如图4所示的机械臂末端工作区间散点图。
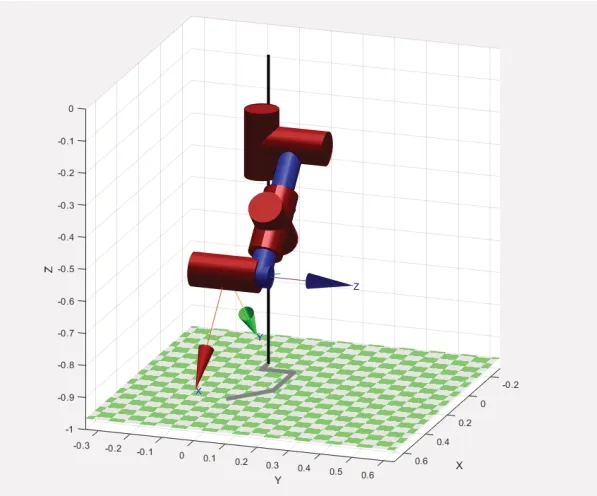
图3 机械臂连杆模型
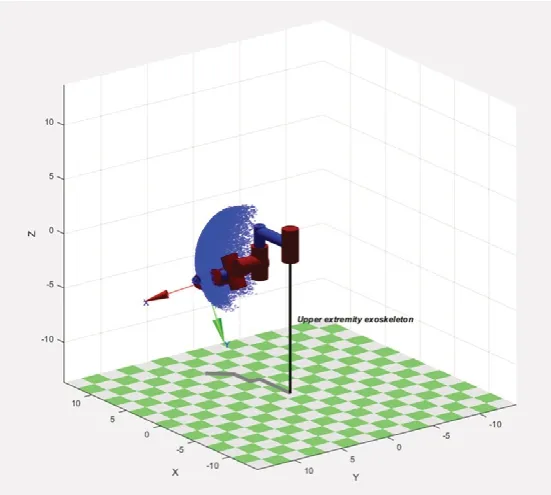
图4 末端工作空间散点图
得到末端工作空间后,以扩胸运动为例在工作区间内选取合适的工作点作为该动作的起始点,通过逆运动学算法获取起始点机械臂的姿态,应用urdf文件导入Simulink,配置相关参数,将选定的姿态信息导入到Simulink获得扩胸动作的可视化模型,如图5所示。
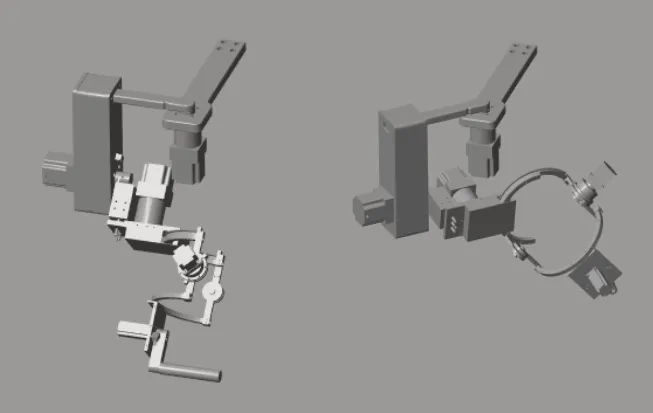
图5 机械臂内收初始姿态与内收姿态
3 五次多项式插值算法
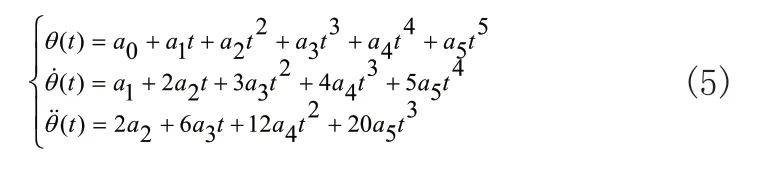
机器人的关节空间轨迹规划的基本思路是使用逆运动学计算方法,将笛卡尔空间中的路径点转换成对应的关节角,然后使用插值点计算方法,对关节型机器人的各个关节计算插值点,使机器人的各个关节同步且柔顺地到达目标点[26]。对于不同应用场景,空间轨迹规划可通过多项式、S曲线、3次B样条等插值算法实现,在中风偏瘫患者软瘫期,上肢外骨骼训练康复机器人的主要任务是恢复患者的能动功能,在单次训练过程中,患者手臂完全按照医师设定的固定动作进行重复性运动,由于该阶段患者上肢较为虚弱,机械臂的运动应全程平缓完成,对角速度以及角加速度要有一定的要求,五次多项式插值算法能够从角度、角速度以及角加速度三个层面约束机械臂的运动轨迹,因此本文着重研究五次多项式的插值算法。
五次多项式的角位移、角速度以及角加速度表达式如下:
带入轨迹起始点和终止点设定的时间、角度、角速度以及角加速度可得:
将上述方程组进行求解,得出五次多项式常数项的解:
4 基于人机交互的外骨骼路径规划
4.1 被动训练模式的路径规划
为了完成机械臂牵引患肢康复训练的任务,通过插值算法对机械臂轨迹进行设计,由于患肢康复初期,各关节能动能力未知,因此需要针对患肢各关节进行恢复性功能训练,在确定患肢各关节能动功能恢复以后再进行完整的手臂组合运动。以一组扩胸运动为例,在人体模型扩胸运动过程中确定几个空间关键点,针对空间点进行轨迹规划,其中单关节训练与扩胸动作共选取八个点位,分别完成单关节功能测试(由初始位姿进行大臂横摆、大臂俯仰以及手腕正旋逆旋运动)和各关节配合的组合动作,最终回到初始位姿完成一组训练,其中,各动作的空间起始点、关节角度以及末端位姿如表2所示。
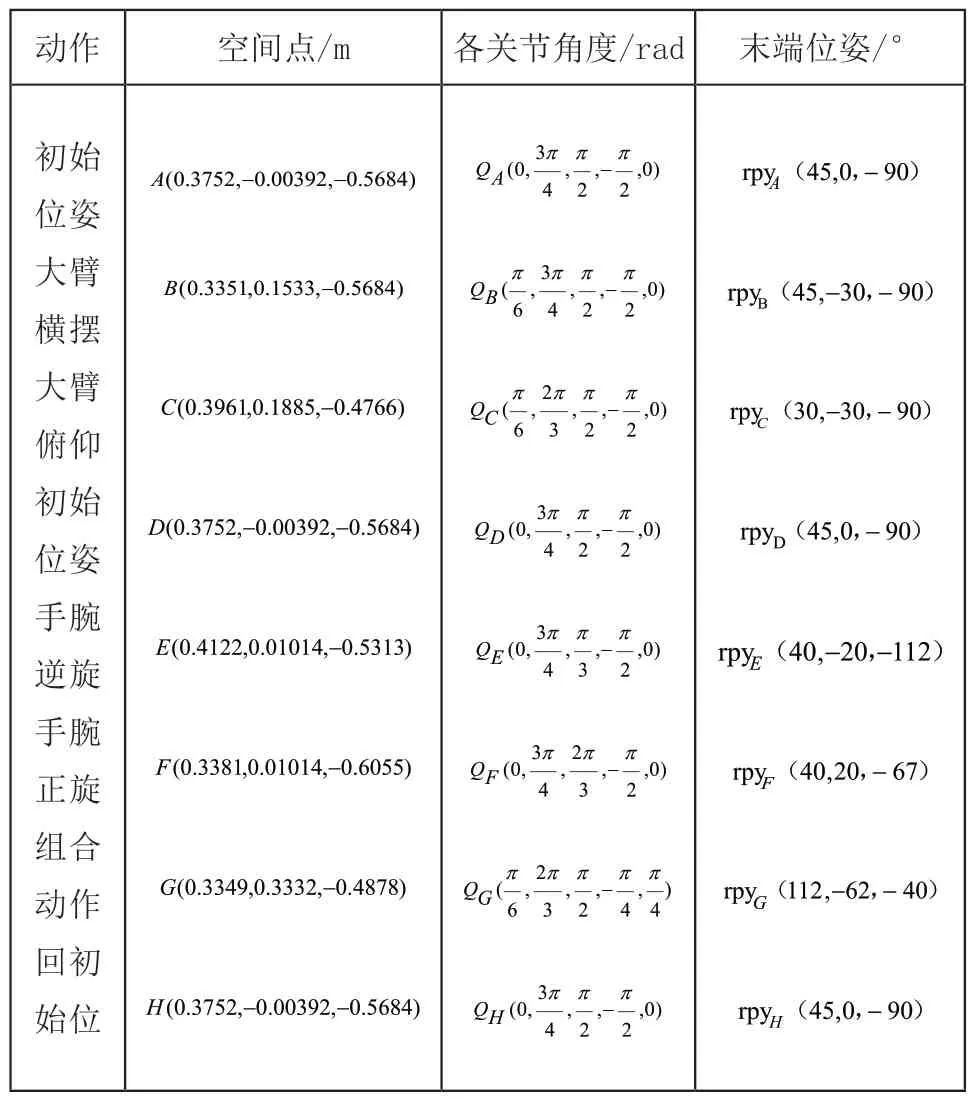
表2 各动作的空间点、关节角度与末端位姿
通过上述八个点,对机械臂轨迹运动进行仿真,并将机械臂末端把手经过的路径进行记录,先后完成大臂横摆、大臂俯仰、回位、手腕正逆旋以及扩胸动作,仿真结果如图6所示。
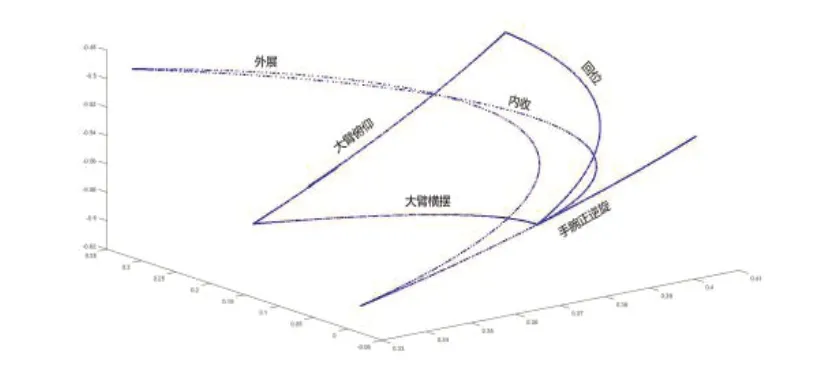
图6 机械臂末端路径点
机械臂末端扫过的路径由各关节轴转动配合实现,其中,在上述单关节功能测试与多关节组合动作时五个关节角度及角速度变化如图7所示。
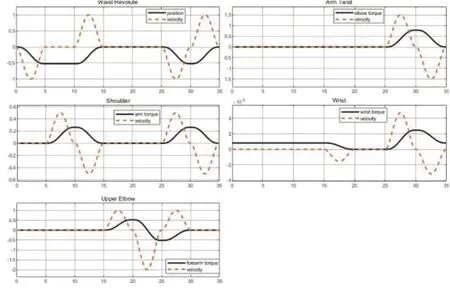
图7 单关节测试及手臂组合动作位置、速度图
4.2 基于人机交互下的路径规划
在单次训练过程中,患者手臂完全按照医师设定的固定动作进行重复性运动,结束软瘫期进入痉挛期后,由于患者已具备一定的能动能力,期望康复训练不仅限于医师设定的固定动作,因此在训练过程中加入人机交互,在原有的运动基础上,在人体上肢与几个主要关节接触点装有力传感器并在训练过程中持续获取人与机器人的交互力,当传感器采集到的交互力信号超过设定值时,通过角位移、角速度与角加速度传感器获取当前机械臂状态,通过几个力信号对人的调整意图进行分类并预测出下一空间工作点,通过当前工作点与动态信息到预测点信息进行轨迹规划并控制机械臂实现调整反馈,流程如图8所示。
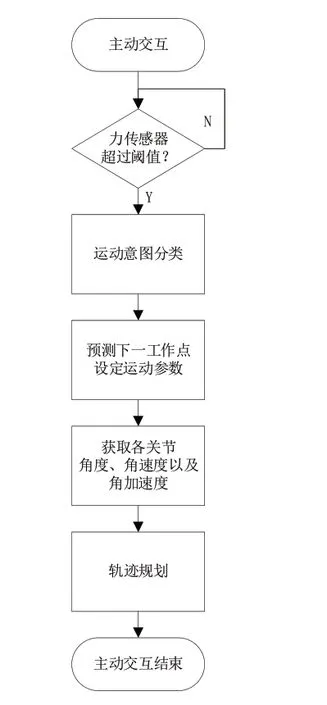
图8 主动交互流程图
以单关节测试过程中的肘部旋转调整两个训练阶段两种调整意图进行仿真,分别为扩胸动作及大臂俯仰调整,其中,单关节测试及组合动作位置、速度图效果如图9所示。
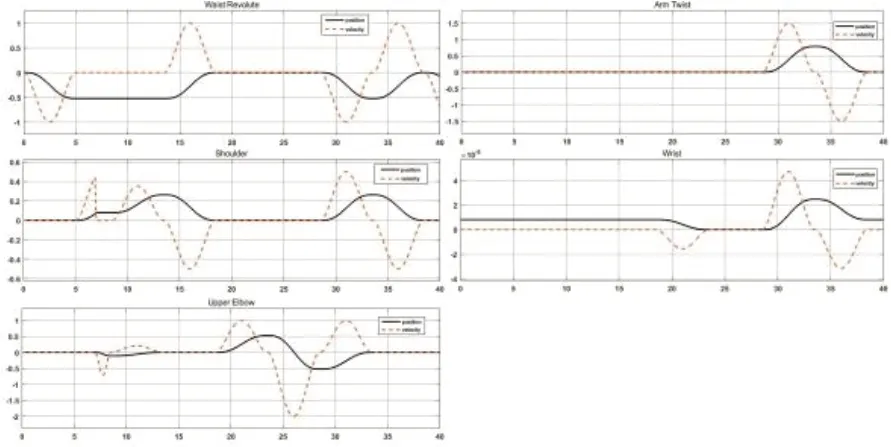
图9 单关节测试过程中肘部旋转调整时的关节位置、速度图
为了验证该控制方法的有效性,在如图10所示的被动训练的扩胸动作过程中手臂按压到位于肘部屈伸关节轴处的力传感器,超过设定阈值后控制器得出了大臂上仰调整意图的结论,使得大臂俯仰关节上仰了一定角度,与图11所示仿真结果比对无误。

图10 扩胸运动始末点位姿状态图
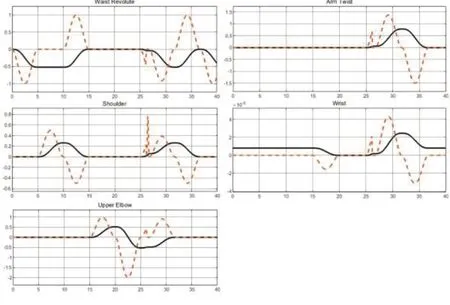
图11 扩胸动作过程中大臂俯仰调整时的关节位置、速度图
5 结语
本文基于偏瘫患者康复训练需求设计了一种五自由度同型同构主从外骨骼上肢训练康复机器人及控制方法,通过MATLAB建立了刚体树模型进行控制研究,并配合urdf可视化模型进行了仿真验证。康复初期通过被动训练可以完成设定的康复训练动作,在康复中期通过人体与关节点接触面上安装的力传感器采集到的人机交互信息实时获取患肢的运动意图,自动实现相关关节角度与速度的细微调整,当力传感器获取的信息消失后根据当前外骨骼位姿与当前进行的环节,通过插值算法确定剩余训练动作所需的轨迹点,继续完成后面的动作。该方法能够在偏瘫患者训练过程中实时检测到患肢与机器人之间的信息交互并对意图进行分类,并控制机器人按照患者的运动意图进行调整,并在调整后继续剩余动作。
