基于二维经验模式分解的明暗截止线特征检测研究
2022-12-11林大超胥钧曾德斌
林大超,胥钧*,曾德斌
(1.华北科技学院 建筑工程学院,河北 065201;2.弥荣(北京)交通科技有限公司,北京 100086)
0 引言
汽车前照灯作为汽车安全部件的重要部分,对驾驶员安全驾驶及减少交通事故起着非常重要的作用。只有在亮度充分、照射方向适合的情况下,前照灯才能达到最佳的利用效果,从而更好地保证汽车的安全驾驶[1]。前照灯近光灯的仪器检测法已逐渐走向实际汽车生产中[2]。它通过明暗截止线及拐点位置对近光灯照射方向进行检测[3]。明暗截止线是明区和暗区的分界线,由水平和倾斜两部分组成[4]。明暗截止线拐点为明暗截止线水平部分和倾斜部分的交点,求取拐点位置主要采用的方法是利用水平明暗截止线和倾斜明暗截止线之间的几何位置关系计算拐点坐标。因此,明暗截止线的准确提取是近光灯检测的重要基础。
机器视觉技术是近光灯明暗截止线检测的组成部分,将明暗截止线视作图像边缘,进行边缘特征检测。常采用的技术路线是先使用滤波算法减少图像中的噪声,再通过图像增强技术,强化边缘,最后利用边缘检测算子或计算梯度值对明暗截止线边缘点进行定位,实现明暗截止线检测[5~9]。对于具有清晰明暗截止线的灯光图像,使用简单的图像增强算法和边缘检测算法就能够取得较为理想的效果。但是,实际灯光图像的明暗截止线具有一定的模糊特性,仅使用传统的图像增强算法和边缘检测算子往往并不能达到预期效果。因此,需要使用复杂的预处理算法凸显边缘特征,如模糊增强算法[9]、形态学算法[8]。经过预处理后获得的明暗截止线在位置准确度上有所提升。不过,预处理算法的过多使用,会对图像原本的特征信息产生较大的影响,而且最后检测得到的明暗截止线仍然存在着准确度不高的问题。与预处理算法不同,二维经验模式分解是对图像原始信号进行分解,从而得到图像的基本特征,得到的特诊具有较高的准确度。边缘作为图像的基本特征,往往位于灰度值急剧变化的位置,通过计算、寻找最大梯度点的位置,是一种常用的边缘判断方法[10]。然而,由于模糊明暗截止线周围的梯度具有渐变特征,基于梯度计算的方法同样存在着位置判断不准确的问题。模糊明暗截止线进行准确定位依然是前照灯检测机器视觉技术应用中有待突破的难点。
本文从分析现有明暗截止线算法存在的不足出发,提出使用在机器视觉领域还未得到充分使用的二维经验模式分解算法,对原始近光灯图像进行特征分解,得到图像中明暗截止线的基本特征。文章分别从理论、特征检测实验和实际检测三个方面进行研究,结果表明二维经验模式分解能够实现对图像特征的检测,并且检测得到的边缘特征在准确度和视觉效果上更具有优势,为模糊明暗截止线检测提供了新的理论方法。
1 明暗截止线特征提取
明暗截止线检测算法,根据算法基理可以分为以下三类:基于阀值分割的自适应阀值算法、基于图像梯度的最大梯度法和基于边缘检测的边缘特征提取算法。其中,自适应阀值算法和最大梯度法由于算法效率低、检测边缘准确性不高和鲁棒性差等原因,已无法很好地满足实际需求。使用边缘检测算子对明暗截止线进行检测是当前受到广泛认可的方法。在传统边缘检测算子中,Canny边缘检测算子和LoG边缘检测算子的使用频率较高且取得的效果较为理想。
图1为文献[6]中近光灯灰度(a)及使用Canny算子检测出的明暗截止线结果(b)。图像中显示,当车灯图像中明暗截止线清晰时,该方法检测得到的明暗截止线结果较为理想。但是,经过实验发现,当灯光图像模糊时,该方法检测出的明暗截止线趋于不稳定,同时,明暗截止线水平部分和倾斜部分的分界点也无法进行很好的判断。
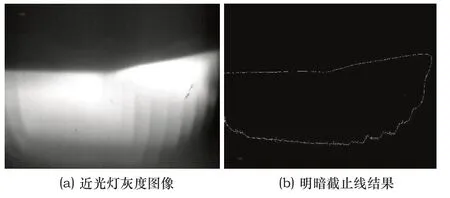
图1 文献[6]近光灯图及明暗截止线检测结果图
图2为文献[8]使用LoG算子对不同近光灯图像进行明暗截止线检测得到的结果。该算法利用LoG算子实现对明暗截止线检测。虽然结果显示该算法对明暗截止线拐点检测的稳定性较好,但是在检测结果的准确性上仍有待提升。主要原因在于LoG算子检测出的明暗截止线边缘是一个“闭合回路”,存在着上下两条边缘,如何从上、下两条边缘中得到实际的明暗截止线则需要进一步的筛选和判断。
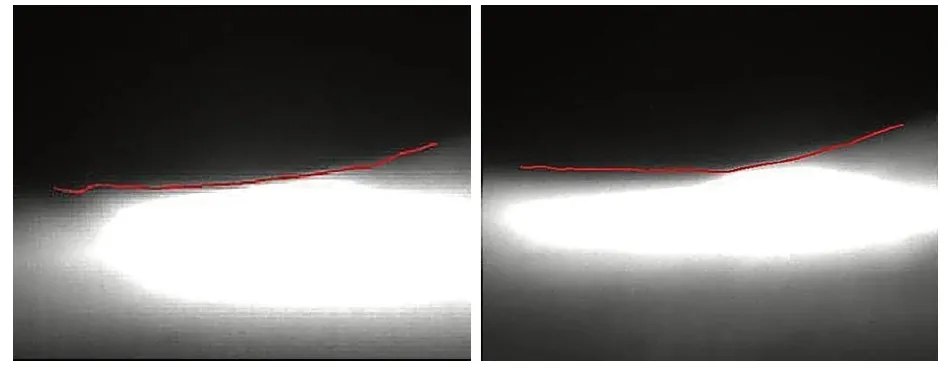
图2 文献[8]明暗截止线检测结果
鉴于模糊增强算法在医学图像模糊边缘检测中取得的良好效果,文献[10]将模糊增强算法应用到明暗截止线的提取,致力于解决由于灯光图像边缘模糊引起的边缘检测结果准确度不高的问题。图3为增加模糊增强算法后得到的明暗截止线,与其他算法检测得到的明暗截止线的对比图。从对比图中可以看出,使用模糊增强算法后,明暗截止线的检测结果在准确性上有了一定的提升。该算法主要存在的问题是,由于模糊增强算法中模糊因子的选取是一个经验值,受个人的主观因素影响较大,导致算法自适应性不高。
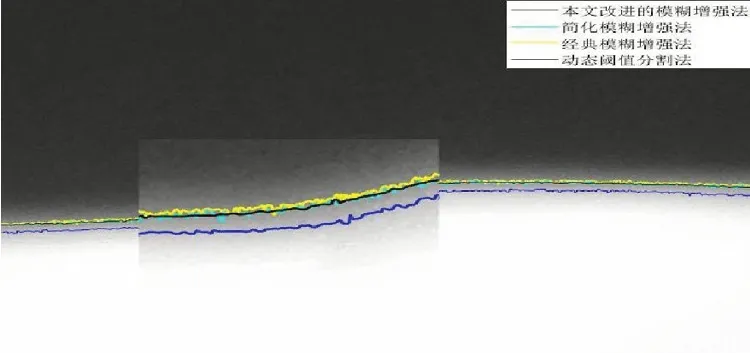
图3 文献[10]明暗截止线检测结果图
2 图像特征的分解分析
图像特征作为图像表述中最为重要的部分,体现着图像本身最基本的属性,包含了用于图像识别的重要信息[11]。经验模式分解作为一近年来发展起来的新方法,它的应用得到了近期研究的工作的广泛重视,如图像去噪[12,13]、图像融合[14,15]。在当前使用广泛的机器视觉领域,对于二维经验模式分解的使用研究还不是很多。
经验模式分解根据信号本身的特性,将信号从频域上由高到低分解为多个固有模态函数(IMF,Intrinsic Mode Function)[16]。二维经验模式分解是将经验模式的分解对象从一维推广到二维得来的。算法的本质是从图像信号本身出发,通过提取图像信息的局部极值点来筛选出具有特征意义的二维固有模态函数的过程。同一类极值点构成的集合即为极值谱[13],如所有局部极大值点构成了极大值谱,极小值点构成极小值谱。
二维图像f(x,y)经分解后可以用以下形式表达:
《形形色色的植物》这一篇课文,学生们只是通过课文的介绍,知道植物世界是一个庞大的、复杂的世界。但是只是通过简单的文字介绍还远远不够,可以通过让学生亲自去植物园中去观察各种各样的植物,让学生切实的感受到植物世界的纷繁。让学生通过观察,去感受这个世界,进而进一步的理解课文上所讲解的内容。

其中,f(x,y)表示图像二维矩阵。(x,y)表示点的位置坐标。ei(x,y)为分解得到的第i个二维固有模态函数(Bi-dimensional Intrinsic Mode Function,BIMF),rn(x,y)经过n次分解后无法再进行分解的残差项,M、N分别为图像的行数和列数。
二维空间中,往往使用邻域窗口法提取图像信号中的极值谱。使用w×h大小的窗口,w、h均为奇数,通过邻域法判断得到极大值谱,判断依据如下:
式(2)中:
其中,aij表示图像矩阵中第i行、第j列的数据值。同理,可以得到图像矩阵的极小值谱。得到的极大值谱和极小值谱可视作为图像的部分特征。
一般情况下,使用3×3大小的窗口来寻找二维图像数据的极值谱是一个比较理想的方法。如图4所示的8×8矩阵,根据邻域窗口发,使用3×3大小的窗口来搜寻极大值谱和极小值谱,图5为得到的极大致谱,图6为极小值矩阵,图7为残差项。由此,图4的复杂矩阵可以看作是由图5~图7矩阵叠加得来,而图5~图7矩阵可表示图像中的部分特征。

图4 8×8矩阵
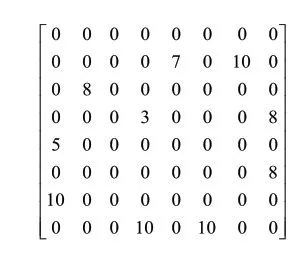
图5 图1的极大值谱
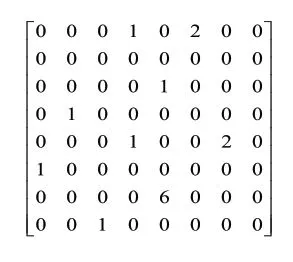
图6 图1的极小值谱
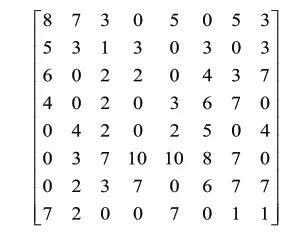
图7 图1残差项
3 二维经验模态分解算法构造和实现
二维经验模式分解具体算法步骤如下[17]:
1)待分解图像f(x,y)初始化,r0(x,y)=f(x,y),x∈[0,M-1],y∈[0,N-1],其中M、N分别代表图像的行数和列数。
2)初始化待分解数据hi,j(x,y)=r0(x,y),i∈[1,n],j∈[1,n]。其中,hi,j表示第i个二维固有模态分量第j次分解的待分解数据。
3)利用邻域窗口法,求取hi,j(x,y)的极大值谱和极小值谱,分别记为P(x,y,value)和Q(x,y,value)。其中,x、y表示点的位置坐标,value为点的灰度值。
4)根据极值谱,使用插值算法进行插值,得到上包络面emaxi,j(x,y)和下包络面emini,j(x,y)。
5)根据得到的上、下包络面,计算均值包络面,计算公式如式(4)所示:

6)对分解信号进行更新,得到剩余待分解图像信号,更新公式如式(5)所示:

7)计算标准偏差SD(Standard Deviation),判断剩余信号是否满足继续分解的条件,计算公式如式(6)所示:

8)当SD∈[0.2,0.3]时,即为满足停止条件,固有模态函数ci(x,y)=hi,j(x,y),新待分解信号ri+1(x,y)=ri(x,y)-hi,j(x,y),i=i+1,j=0;否则,即判断为不满足停止条件,返回至步骤3,令j=j+1,继续进行分解,直至满足条件。
4 明暗截止线特征
4.1 BEMD图像边缘特征分解
使用BEMD算法,对三张不同的图片进行特征分解。第1张为构造简单、线条清晰的蝶与叶图像。第2张为图像处理中常用的Lena图像。第3张为线条构造复杂的几何图像。图8~图10给出了使用BEMD方法分别对三张图片进行特征分解的检测结果。从视觉角度上看,BEMD的检测结果能够很好地反应出图像边缘特征及变化趋势。从得到的边缘特征图像中可以看出,得到的第一个固有模态分量BIMF1效果最为突出,不仅能够较好地反应出边缘特征,而且保留了较多的细节信息,如蝶与叶图中的纹理、Lena图中人物的五官信息以及几何图中的一些不明显的边缘信息。分解结果显示,随着分解程度的不断加深,图像的失真程度也在增加,但仍保留着一些明显的边缘信息,即使在趋势图像中也能有较少的体现。
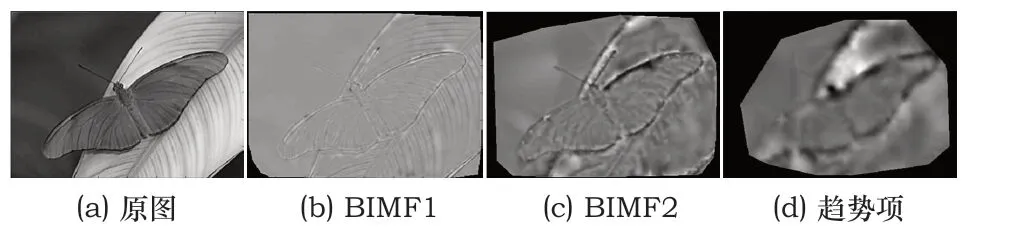
图8 蝶与叶图二维经验模式分解结果

图9 Lena图二维经验模式分解结果
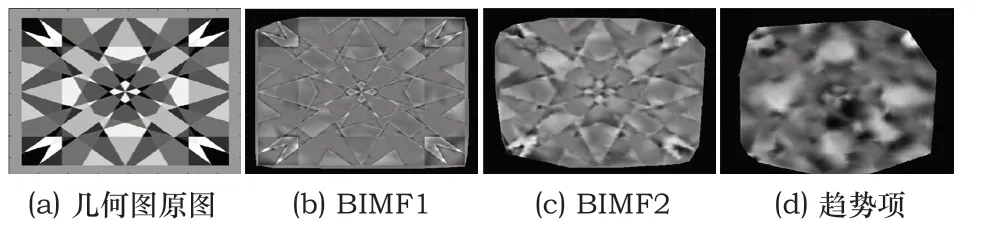
图10 几何图二维经验模式分解结果
4.2 BIMF1与LoG算子、Canny算子检测结果对比
将通过使用BEMD方法得到的图像边缘特征,与LoG算子得到的边缘特征图像,以及Canny算子检测出的图像边缘特征图像进行对比。图11~图13给出了同一幅图像分别使用BEMD方法、LoG边缘检测算法、Canny边缘检测算法得到的结果图,其中只给出了BEMD分解方法得到的BIMF1分量。与LoG边缘检测结果相比,BEMD算法不仅能够对边缘进行准确定位,而且在边缘细节上也有较好体现。与Canny边缘检测结果相比,BEMD方法检测出的边缘细节更为丰富、细致,比如蝴蝶图像中的纹理、Lena图像中人物的五官特征、几何图像中一些较弱的边缘细节。而且,通过对三种方法的检测结果对比发现,BEMD算法得到的特征图像具有一定的层次感,检测结果更优于其他两种方法。

图11 蝶与叶图片边缘检测结果对比

图12 Lena图边缘检测结果对比
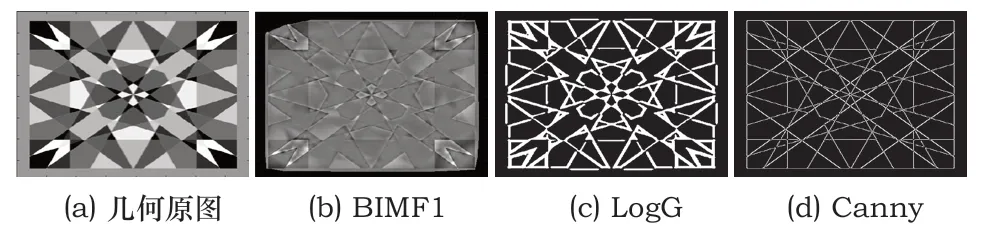
图13 几何图边缘检测效果对比
5 近光灯图像分析及明暗截止线检测
图14为分别使用二维经验模式分解算法、LoG边缘检测算法、Canny边缘检测算法获取近光灯图像的明暗截止线特征。BIMF1为使用二维经验模式分解得到的特征图像,在图像中存在一条明显的边缘线,能够清晰地反应出近光图像的明暗截止线特征。LoG边缘检测得到的近光灯明暗截止线特征为“闭合回路”,存在着上下两条边缘,对于实际的明暗截止线位置需要进行下一步判断。Canny边缘检测算子得到的明暗截止线特征图像中,虽然存在着一条较长且清晰的边缘线,但同时存在着较多光源区域内的伪边缘信息,无法进行很好地识别和定位。

图14 近光灯及其三种不同方法的检测结果
6 结语
边缘作为图像的基本特征,能够很好地反应出图像内容及结构。本文从理论和算法构造上详细介绍了二维经验模式分解,将二维经验模式分解应用到实际的近光灯检测研究中,使用该算法对近光灯图像进行分解,得到图像的明暗截止线特征分量。
通过对不同图像进行特征分解,二维经验模式分解能够很好地应用到图像特征检测。与LoG边缘检测算子、Canny边缘检测算子得到的边缘特征相比,二维经验模式分解结果能够更有层次感地反应出图像特征。
对前照近光灯明暗截止线进行特征提取,二维经验模式分解得到的明暗截止线边缘特征,在清晰度和准确度上要更优于Canny边缘检测算子和LoG边缘检测算子的检测结果。同时,表明二维经验模式分解方法较好的实用推广价值。
