基于改进狼群算法的焊接机器人路径规划*
2022-12-10涂福泉李圣伟
龚 正,涂福泉,李圣伟
(武汉科技大学 机械自动化学院,湖北 武汉 430081)
0 引 言
随着科学技术的发展,焊接机器人在汽车制造业中的作用越来越大,以焊接机器人为核心的生产和技术改革,成为越来越多的学者研究对象,其中研究重点之一就是白车身焊接任务的合理规划[1]。白车身是汽车设计的重要组成部分,拥有着5 000~7 000个焊接点[2]。如果能有效合理的规划出焊接路径,不仅能大大提高焊接机器人的工作效率,也可以降低生产中的成本[3]。焊接路径规划所用方法可以分为两种,传统算法路径规划和智能算法路径规划。传统算法计算速度快,方法也简单,但在解决多焊点离散型问题上很难找到最优解,已不能满足路径规划需求。因此,越来越多的学者开始利用智能算法开展路径规划研究。王春华等人[4]在蚁群算法中加入局部搜索策略,并引入最大最小蚂蚁机制对算法进行了改进,避免算法陷入局部最优,但算法选取精英蚂蚁比较困难,且对路径规划结果影响很大。吴明辉等人[5]提出了一种梯度下降和蚁群的混合算法,通过算法间的结合,增加了蚁群算法在寻优过程中的随机性,但是算法路径规划所用时间太长,不利于提高工作效率。林巨广等人[6]利用蚁群算法对焊接路径进行规划,通过引入评价函数来提升算法的工作效率,但是选取的焊点实在太少,初始路径也比较有规律,不具备普适性。
与上述方法相比,狼群算法(wolf pack algorithm,WPA)具有良好的收敛性和鲁棒性,能够适用于不同的焊接路径,所以选用了WPA对焊接路径进行规划。但WPA也存在着精度不高、容易陷入局部最优且搜索时间太长的不足[7,8],为此,对WPA进行了改进,提出了一种基于Logistic混沌初始化的模拟退火WPA。将改进WPA应用于TSP和焊接路径规划任务中,利用MATLAB仿真分析验证算法的有效性和可行性。
1 焊接路径规划任务描述
1.1 车门焊接件结构描述
汽车车门是白车身的重要组成部分,车门上焊点分布特征明显,几乎在一个平面上,本文选取上汽荣威IR31白车身车门为示例,忽略焊点高度差,建立二维车门焊接任务模型。如图1(a)为车门结构,从图中可以明显的看出,车门上的焊点数量众多且排列没有规则,现从其中提取出焊点模型,为焊接路径规划做准备。车门焊点模型如图1(b)。
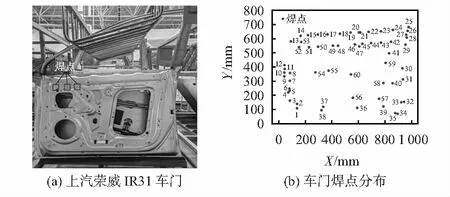
图1 车门模型
1.2 焊接任务描述
本文将焊接总路径距离最短作为目标函数,来进行焊接任务路径规划,即焊接机器人从初始位置出发,在遍历所有焊点后回到初始位置,寻找出一条焊接路径总距离最短的路线。焊接路径规划模型如下:
给定N个焊点,N个焊点的其集合为C=(c1,c2,…,cn)以及各焊点之间的距离d,目标函数为
(1)
式中L为遍历焊点的总路径长度,d(ci,ci+1)为第i个焊点ci与第i+1个焊点ci+1之间的距离,i=1,2,…,n-1,d(cn,c1)为第n个焊点cn到第一个焊点c1之间的距离。在整个路径规划过程中,怎样使目标函数L最小,是路径规划的关键。
2 改进WPA
2.1 WPA
狼群在捕猎过程中分工明确,相互协作,对捕获到的猎物按劳分配,弱小的狼自动被淘汰。WPA模型[9]如图2。

图2 狼群捕猎活动
狼群的捕猎空间为N×D,其中,N为狼群的人工狼数量,D为焊点数量,人工狼用Xi表示,Xi=(Xi1,Xi2,…,Xid),Xi即为焊点序列。目标函数:L=F(X),L为焊接路径长度。狼群捕猎规则如下:
1)头狼产生:以狼群中目标函数最小的狼为头狼,头狼引领整个狼群,当出现目标函数更小的人工狼时,更新头狼。即:若人工狼目标函数Li小于头狼目标函数Llead,则Llead=Li,Xlead=Xi。头狼不执行3种智能行为。
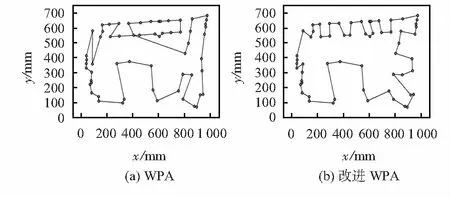
2)游走行为:狼群中探狼负责寻找猎物,游走过程中探狼向t个不同方向游走,计算游走前后的目标函数值,选择目标函数更小的方向前进,前进后更新探狼位置。之后探狼继续游走,直至Li 3)召唤行为:头狼召唤,其余狼向它靠近奔袭,在奔袭过程中,猛狼所在位置目标函数Li小于头狼所在位置目标函数Llead,则更新头狼,新的头狼继续召唤行为,直到与头狼Xlead的距离dis小于或等于所要求的判定距离dnear。猛狼与头狼间的距离采用最长公共子序列[10,11]来计算。判定距离dnear,dnear=1/(D×ω),ω为距离判定因子。 4)围攻行为:经历过召唤行为的狼,已经距离猎物非常近,而且狼群中人工狼的距离也非常近,在围攻的时候,狼群采用精细化搜索向猎物靠近,围攻前后目标函数值变小,则更新人工狼所在位置,如果没有,则人工狼位置不变。 5)狼群淘汰机制:狼群按强者生存法则,淘汰掉狼群中弱小的狼。即将狼群中目标函数值较差的狼从狼群中淘汰出去,重新产生多条新的狼,以此增加整个种群的多样性。 2.2.1 Logistic混沌初始化 狼群的初始解很大程度影响着狼群最后寻优精度和稳定性,初始解分布不均匀,也将直接影响算法的寻优结果,为使初始种群中的个体更好的遍及整个解空间,减少初始解对算法的影响,本文采用Logistic混沌初始化方法[12]对狼群进行初始化处理,混沌序列产生公式如下 Zi+1=μZi(1-Zi),i=0,1,2,…,n,μ=4 (2) 其中,0≤Zi≤4,且Zi≠0.25,0.5,0.75。 2.2.2 2-opt算子 狼群围攻过程中,人工狼之间距离已经越来越近,狼群精细化搜索起到的作用越来越少,但狼群精细化搜索所用时间却很长,利用2-opt算子代替狼群围攻行为,可实现细化搜索,提高搜索速度,减少搜索时长。2-opt算子示意如图3所示,选取abcd共4个焊点,若ab的距离加cd的距离大于ac加bd的距离,则反转cb段编码。若没有,则保留。 图3 2-opt算子示意 2.2.3 模拟退火算法 WPA在搜索后期存在着正反馈效应,头狼引领着整个狼群,若头狼没有前进,狼群中所有的狼就会离头狼越来越近,狼群中解的种类就会越来越少,最终就会出现停滞现象。并且WPA中的淘汰机制目的即为增加种群多样性,让算法拥有一定的概率突破局部最优解,但概率实在太小,到算法寻优后期很难找到更好的解。通过引入模拟退火机制,不仅能够有效地增加解的多样性,而且能避免WPA陷入早熟现象。模拟退火算法的引入,就是在所有狼完成一轮搜索后,让头狼作为变换的基础,以一定的概率进行互换、逆转和平移中的一个操作,以产生新的不同解。若新的解总路径更短,则重新计算初始解和新的解偏离度,如果偏离度变小了,则接受新产生的解,如若没有,则以一定的概率接受新的解[13]。接受概率为 (3) 式中p为接受新解的概率,ΔD为新旧解的偏离度差值,T为当前所处的温度,在完成模拟退火操作之后,再进行目标函数更新和降温操作,降温公式为T=T×a,a为降温系数,a∈(0,1)。 改进WPA步骤如下:1)初始化:初始化狼群规模Nwolf,最大游走次数Smax,退火温度T,冷却因子a,最大迭代次数kmax,距离判定因子ω等参数,logistic混沌初始化每匹人工狼的位置Xi,计算目标函数值Li,选出头狼。执行步骤2。2)探狼游走:当目标函数值Li≤Llead或者达到最大游走步数Smax,转入步骤3,否则,继续游走。3)头狼召唤:若人工狼目标函数Li大于头狼目标函数Llead,则重复召唤行为。若Li≤Llead,则更新头狼,计算人工狼与头狼的距离dis,判断dis与判定距离dnear的大小,若dis≤dnear,则转入步骤4,否则继续召唤行为。4)猛狼围攻:猛狼执行围攻行为,围攻后转入步骤5。5)模拟退火:狼群执行模拟退火操作。6)更新狼群:更新狼群计算目标函数值。7)降温操作:根据式(5)降温操作,若当前温度T小于最小温度Tmin,或者达到循环次数kmax则退出循环,输出最优路径,否则,转步骤2。 机器人焊接路径规划可看作TSP,为验证改进WPA具有一定普遍性,可以适用不同的路径情况,现将基本WPA、改进WPA、蚁群算法和模拟退火算法分别应用于TSP求解,迭代次数为1 000次,重复运行算法30次,做对比分析。验证算法的数据均来自TSPLIB标准数据库。算法的测试环境为个人电脑:Intel®coreTM2.9 GHz,8 GB RAM,在Windows 10系统下的MATLAB R2018a编程测试,算法的各参数由经验和试算得到。由表1可以看出,在算例Burma14,Oliver30,Eil51和Pr76中,改进WPA具有较好的寻优能力,相比其他3种算法,改进WPA在4个案例中均寻找到了已知最优解,偏差为0,收敛率为100 %,具有明显优越性。 表1 4种算法的寻优结果对比 仿真试验证明,改进WPA具有良好的收敛性能和寻优能力,可以适用不同的路径情况。图4为改进WPA在以上算例上的最优解路径。 图4 改进WPA路径寻优 将改进WPA运用到车门焊接路径规划任务中,以上汽荣威某车型车门焊接模型为例,分别利用基本WPA和改进WPA对焊接任务进行路径规划,算法迭代次数250次,重复运行30次,取单次和多次算法寻优结果进行对比分析。图1(b)为某种车门实物,均匀的取车门上的60个焊点做仿真。图5(a)为基本WPA规划的结果,最终得到的焊接路径最短长度为5 457.130 9 mm,路径规划所用时间为268 s。图5(b)为改进WPA的机器人焊接路径规划的结果,最终得到的最短焊接路径长度为4 592.384 5 mm,路径规划所用时间为28 s。改进WPA在MATLAB仿真中,最短焊接路径为:1—2—3—4—5—6—7—8—9—10—11—12—13—52—53—14—15—51—50—16—17—49—46—47—45—20—21—22—44—43—23—24—25—26—27—28—29—42—41—59—30—31—40—58—33—32—34—35—39—57—36—56—60—55—54—37—38—1。 图5 2种算法寻优路径 图6为基本WPA和改进WPA在焊接路径中的单次和多次寻优路径对比,可以看出,改进WPA的收敛速度明显高于基本WPA,改进WPA在迭代50次左右就开始收敛,而基本WPA在迭代70次左右才开始收敛。在搜索过程中,改进WPA在迭代60~80次时能很好地跳出局部最优解,在迭代100~130次时就能寻找到最优解,而基本WPA并不能有效地跳出局部最优,且会发生停滞现象。从算法单次寻优结果上看,改进WPA最短路径比基本WPA减少了864.74 mm,总路径缩短了15.8 %,且在路径规划时间上减少了4 min,所用时间缩短了89.5 %。 图6 单次、平均寻优路径对比 本文改进的WPA具有很好的普适性,能够适用于不同的路径,寻优偏差小且收敛率高;从焊点路径规划试验结果分析,改进WPA在路径规划任务中取得了明显的效果,解决了基本WPA寻优过程中的不足;通过引入Logistic混沌初始化、2-opt算子和模拟退火算法对WPA进行的改进是有效的,改进WPA能够很好的适用于焊接路径规划任务中,提出的改进策略缩短了算法运行时间,增加了算法精度,成功帮助算法在路径规划中跳出了局部最优解,大大提高了算法性能和焊接效率。2.2 WPA改进策略

3 改进WPA流程
4 仿真试验与分析
4.1 TSP仿真分析


4.2 车门焊点路径规划仿真分析

5 结 论
