具有死区输入的多机器人系统角度刚性编队控制
2022-12-08陆薪屹王恩赐潘祯颀
陆薪屹, 王 芹, 王恩赐, 潘祯颀, 裔 扬
(扬州大学信息工程学院, 江苏 扬州 225127)
近年来,由于仿生学、计算机科学、人工智能及社会学等多个学科交叉和渗透发展,多机器人协同控制技术受到广泛关注.多机器人编队运动要求多个机器人作为一个整体同时运动到目标区域,且在运动过程中始终保持给定队形, 这种群体行为控制是解决多机器人协同控制技术的基础,对实现多机器人在分布式空间环境中协同执行任务有着重要意义.在多机器人编队控制中,控制器获取的信息通常有邻居智能体的相对位置、 距离和相对角度.与基于相对位置或距离的控制器相比,基于相对角度信息的编队控制器对传感器的要求极低, 能克服基于距离或位置观测信息的编队控制的局限性,因而成为研究热点[1].Zhao等[2]提出了多机器人编队控制角度刚性理论; Wu等[3]设计了有限时间收敛的相对角度编队控制律,并证明了实现避撞的充分条件; Chan等[4]不再将机器人视作简单的质点,而是将每个智能体假设为一个具有等半径的圆盘状物, 然后基于视觉传感器的圆盘内角测量提出一种基于梯度的分布式控制律,并证明了相关误差系统的指数收敛性质; Dai等[5]研究了具有距离和相对角度传感器的非完整系统的编队控制, 在考虑传感器的范围及视角受限制的同时实现了避撞, 并验证了该控制算法的有限时间收敛性; Li等[6]解决了具有预设收敛时间的纯方位编队控制问题,并可任意设定收敛时间; Lee等[7]提出一种仅利用相邻机器人与障碍物之间的相对位置信息的分散编队控制算法, 采用领导-跟随者结构编队控制方法实现灵活编队, 同时引入逃逸角度简化了避撞算法的设计; Zhao等[8]考虑单、双积分器和非完整小车的多智能体模型, 提出一种仅含角度信息的编队控制律.现有的基于相对角度的编队控制研究大多忽略了面向实际工程应用时存在的外部环境干扰以及应用问题中特有的特征信息,并且目前国际上对多机器人协同编队控制的研究多未考虑输入非线性或环境影响等不确定因素.上述文献均只考虑了线性输入,而死区作为最重要的非线性输入问题之一,在高压变电站和生物医学系统等实际设备中广泛存在,且是闭环系统失稳和限制控制性能的常见原因; 因此, 具有非线性死区输入的一致性问题受到越来越多的研究者的关注.Wang等[9]针对具有输入饱和和随机扰动的线性多智能体系统,利用低增益反馈方法解决了协调跟踪控制问题;Li等[10]研究了非完整多智能体系统的角度编队跟踪控制问题,利用自适应估计算法消除系统模型不确定,但其输入为线性输入;Bao等[11]针对一类具有未知死区输入的非仿射非线性系统,提出一种模糊自适应有限时间跟踪控制算法,系统输出信号可以在有限时间内跟踪到参考信号的小邻域;He等[12]研究了一类多输入多输出(multiple input multiple output, MIMO)切换系统的跟踪控制问题,该系统包含状态受限和非线性死区输入. 然而,上述文献均未考虑多智能体协调编队控制问题. 目前,针对具有非线性死区输入的角度刚性编队控制的研究甚少,本文拟探讨具有非线性死区输入的角度刚性编队控制问题.
1 问题描述
考虑在空间中移动的具有n个智能体的系统, 每个智能体模型如下:
(1)
其中智能体i的位置ri∈Rh,Rh为h维实数向量空间,h=1,2,…,n;w(ui)表示具有输入为ui的非线性死区函数;dui为外部扰动, |dui|≤Dui,Dui为一个未知正常向量,i=1,2,…,n.现将输入为ui、输出为w(ui)的死区模型描述为
(2)
其中br,bl为死区边界参数;kr,kl为正常数.
为了设计稳定的编队控制, 对死区模型作如下假设: Ⅰ) 死区输出w(ui)是不可测量的; Ⅱ) 死区参数br,bl为未知有界常向量,br>0,bl<0, 正常数kr=kl=k.
为了便于分析, 重新定义死区为
w(ui)=kui+dw(ui),
(3)
其中
(4)
显然, |dw(ui)|≤kbmax.令bmax=max{br,-bl}, 有
(5)
将编队中的通信关系以无向拓扑图G=(V,E)表示,该无向拓扑图由顶点集V={1,2,…,n}和边集E={(i,j)∈V×V|j∈Ni}组成, 且二者都为非空集合, 其中Ni为节点i的全部相邻节点的集合.
定义智能体i与其邻居智能体j的相对位置rij和相对角度gij为:
(6)
其中ri,rj分别为智能体i和其邻居智能体j的位置,‖rij‖为智能体i与j之间的欧氏距离, 且j∈Ni.由于本文采用无向拓扑图, 故rij=-rji,gij=-gji.在实际应用中, 通常可以用机载视觉来测量智能体之间的相对角度.
H=H(G)=(hij)∈Rm×n,
(7)

定理1[8](队形确定性) 如果一个编队是无穷小角度刚性编队, 且已确定其平移比例和缩放比例, 则队形可以被唯一确定.
笔者考虑具有未知死区的多智能体系统角度刚性编队控制, 待解决的编队控制问题如下:在输入具有未知死区的情况下,构建一个仅利用角度信息的编队控制策略ui(t)∈Rh,i=1,2,…,n, 使得从任意初始位置ri(0)∈Rd出发的智能体都能达到期望的队形.
2 全局稳定控制器
构建智能体i与其相邻智能体j之间的势能函数

(8)
定义
(9)

(10)
智能体i的总势能函数为
Vi=∑j∈NiVij(rij).
(11)

(12)

(13)
其中设计参数λi为正常数.
3 稳定性分析
根据Barbalat引理分析整个闭环角度刚性编队控制系统的全局稳定性, 并给出下面的定理.

证明 选取Lyapunov候选函数
(14)

(15)
将函数(14)对t求导并代入式(12)(13), 可得
(16)



(17)

(18)
由式(17)(18),有
(19)

4 仿真结果
通过MATLAB软件建立智能体模型, 验证本文设计的自适应编队控制算法的有效性.首先考虑一类具有死区非线性输入和外部扰动的非线性系统, 其动力学方程为
(20)


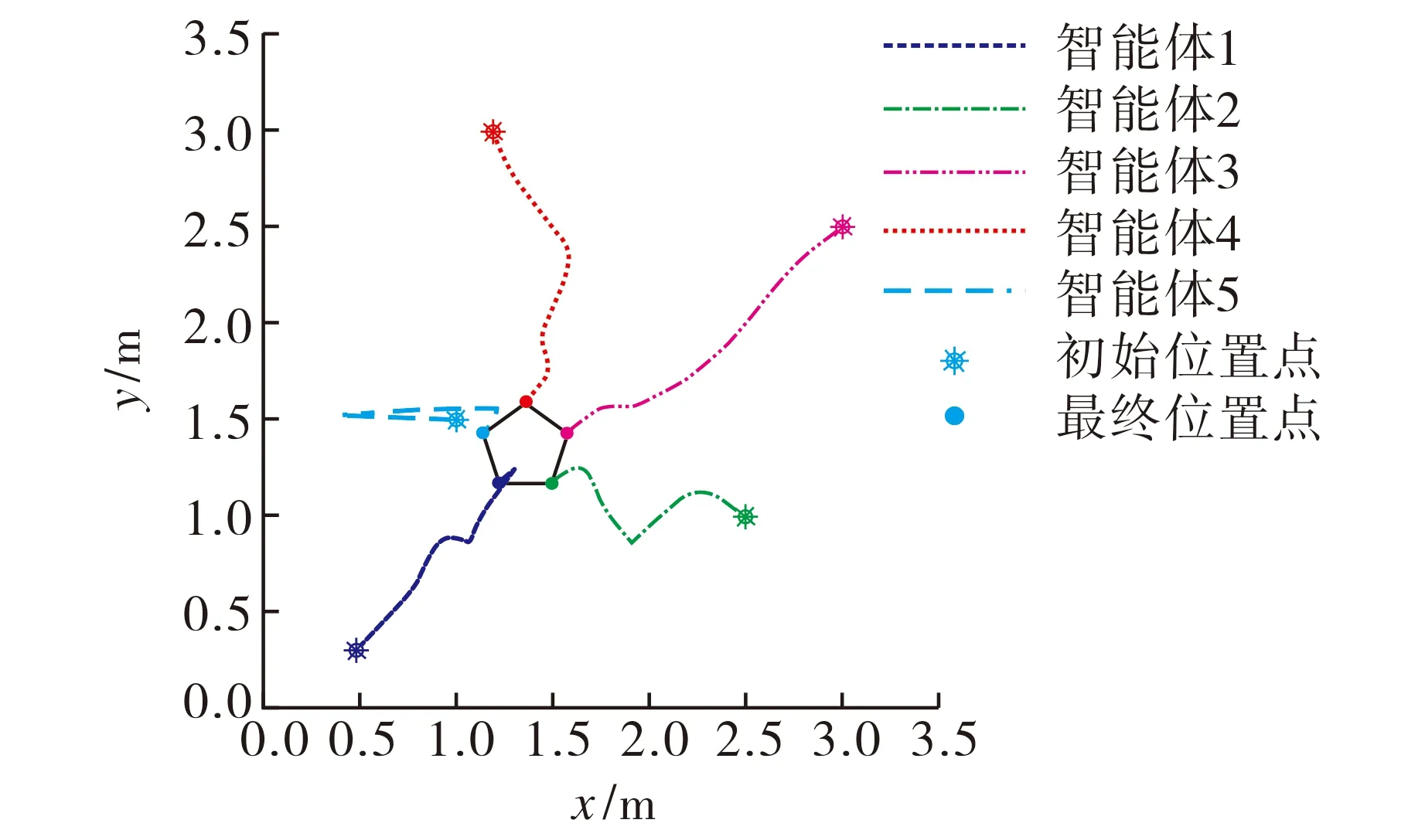
图1 机器人运动轨迹图Fig.1 Robot trajectory diagram
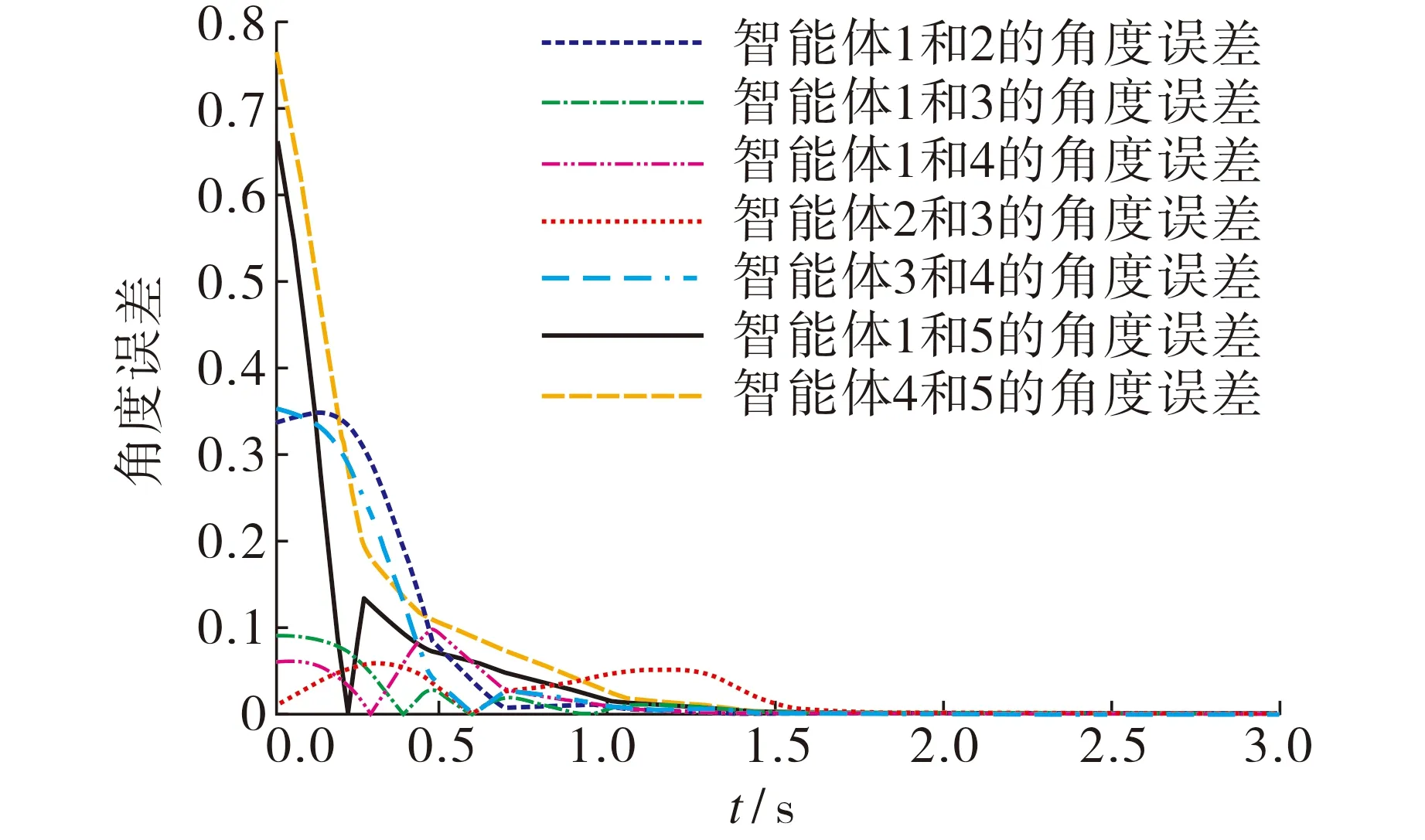
图2 实际角度与期望角度的误差Fig.2 The errors between the actual bearing and the expected one