永磁爬壁机器人设计与实现
2022-12-07通辽发电总厂有限责任公司李福龙魏春雷张志强姜海波高智博
通辽发电总厂有限责任公司 李福龙 魏春雷 张志强 姜海波 高智博
在电子技术以及机器人技术高速发展的背景下,对于锅炉内部除锈除垢、放射性、高温等的工作场景,仅靠人类自身无法完成相应的工作,因此对特种机器人的需求越来越强烈。
我国自1987年实施“863”计划以来,明确将智能机器人确立为自动化领域。爬壁机器人属于特种机器人领域的范畴,爬壁机器人具有在垂直壁面上的移动能力,可以在地面移动机器人的基础上加以改进和完善,使其具有在不同壁面上的爬壁能力,同时爬壁机器人可以在自身结构上设计相关工具进而完成一些特定的作业任务,具有在垂直壁面上的作业能力。
爬壁机器人按照不同的运动方式,可以分为履带式以及滚轮式等,按照不同的吸附方式可以分为真空吸附式以及磁力吸附[1-4]等。同时,华北电力大学研发出利用真空吸附的爬壁机器人[5],其主要是通过制造真空环境将机器人紧紧吸附在光滑的壁面上,但这种方式只适合光滑表面,对粗糙壁面并不适用。
本文意在研究应用在火力发电锅炉水冷壁表面的爬壁机器人,利用永磁体的吸附力使自身能够吸附在火力发电锅炉水冷壁铁磁壁面上进行自由运动,后期可携带清洗、除锈等工具完成相应任务,如火力发电的锅炉水冷壁除锈、火力发电锅炉表面自动化清洗等工作。同时,通过结构设计使机器人具有一定的越障能力。
1 爬壁机器人结构设计
爬壁机器人作为可以在垂直壁面运动的一种特殊机器人,与现有的地面移动机器人有诸多相似之处,但是因为爬壁机器人在垂直壁面上运动或作业的特殊性,因此在运动原理以及自身结构上有较多不同之处,爬壁机器人就不同的工作环境需要选择不同的运动方式以及吸附方式。
1.1 吸附方式选择
需要选择合适的吸附方式以及爬壁机器人的行走方式,同时设计制作机器人的结构件。
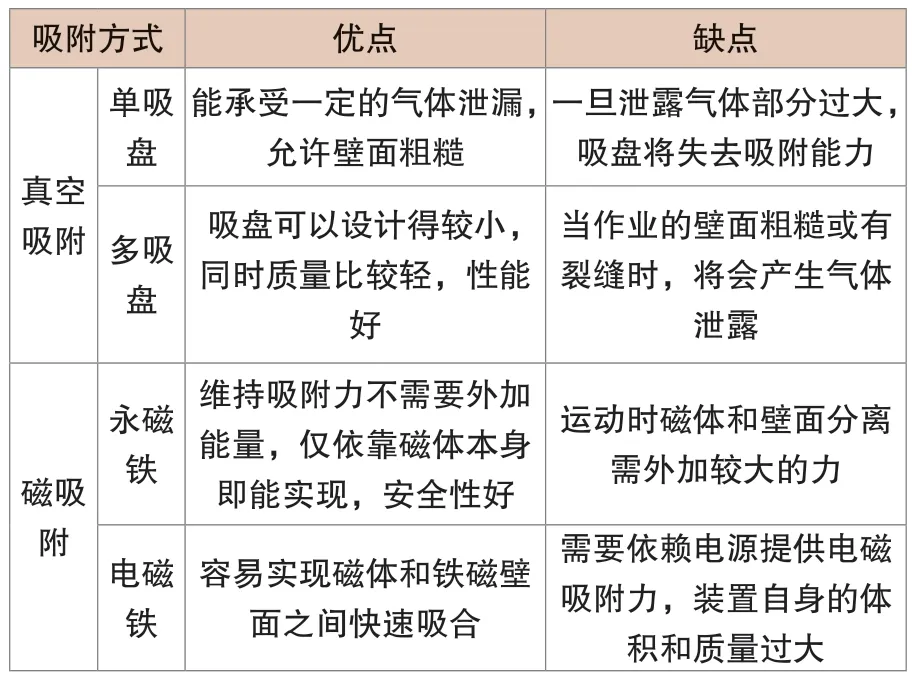
表1 三种吸附方式优缺点比较
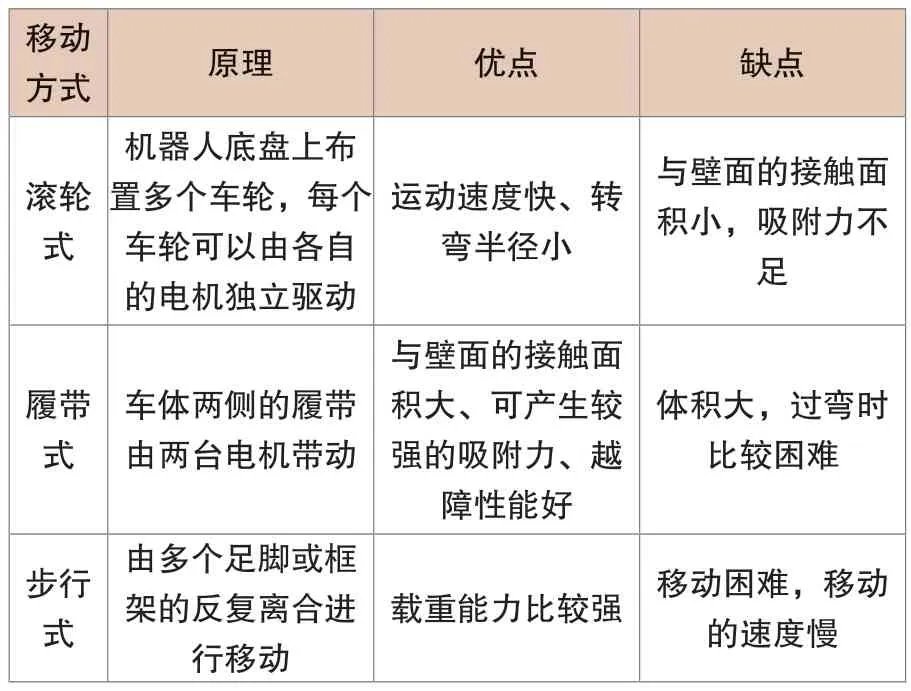
表2 各种移动方式的比较
通过分析和比较,为了使爬壁机器人在运动过程中始终保持良好的吸附力,在爬壁机器人的设计中,采用爬壁机器人底盘布置永磁体加永磁吸附滚轮的方式,原因如下:
一是真空吸附式需要在车体上携带真空吸附装置,这就使得车体本身的体积过大,设备也比较昂贵,选用底盘布置永磁体加永磁吸附滚轮的方式相对试验来讲经济性较高。
二是采用永磁吸附滚轮式加底盘布置永磁体方式,与铁磁壁面的直接接触面积大,可维持较大的吸附力,越过障碍的能力强,在结构合理设计的基础上可携带一些作业工具进而完成相关的工作任务。通过合理设计小车底部结构,在爬壁机器人的底部预留出放置永磁的空间,同时降低底盘高度,使磁体更加贴近壁面,同时可根据携带作业工具的质量大小来灵活增减永磁体的数目。
三是采用的滚轮式可通过两侧滚轮之间的相对运动实现转弯,爬壁机器人不用设置专门的转弯机构,相比于单驱动爬壁机器人成本更低。
1.2 结构设计
爬壁机器人采用SolidWorks软件,对爬壁机器人的底盘结构进行结构设计,然后通过3D打印,如图1所示,在结构设计时,保障爬壁机器人的底盘尽可能地贴近铁磁表面,以此获得更好的磁吸力,同时永磁吸附滚轮上嵌入的永磁体也可以提供一定的吸附力。爬壁机器人可在垂直壁面上行走,并能完成水平面到垂直面的过渡爬行。爬壁机器人采用永磁吸附滚轮的方式,双滚轮上的两台电机以同速度转动时可带动爬壁机器人的前进及后退,当左侧滚轮处的电机带动滚轮转动,右侧滚轮处的电机停止时爬壁机器人实现右转,当右侧滚轮处的电机转动,左侧滚轮处的电机停止时爬壁机器人实现左转。

图1 爬壁机器人底盘实物图
2 爬壁机器人的磁吸附设计
2.1 永磁性材料的选择
当爬壁机器人在垂直于壁面运动时,底盘上的永磁铁的磁吸力应大于爬壁机器人的总重力,保障爬壁机器人有足够的磁吸力,使其吸附在铁磁表面上。钕铁硼三元系永磁材料是市面上性价比较高的永磁体,其机械加工性能优良,工作温度最高可达200℃。本文选用钕铁硼永磁材料的型号为N35,其性能参数见表3。N35型钕铁硼永磁材料的磁性较强,在设计过程选用的长方体结构钕铁硼永磁铁。在保障爬壁机器人紧紧吸附在铁磁壁面上的同时又减小了爬壁机器人自身的体积。

表3 N35性能参数
2.2 永磁铁吸附装置的原理和结构
在实际测试中,发现永磁体之间两个一对然后并在一排的布局磁吸力最大,因此利用SolidWorks进行建模时,在机器人底盘部位布置8个孔槽,如图2所示,每个孔槽比永磁体略大,将8块永磁铁分别装入设计好的8个槽中,永磁铁与铁磁性墙壁存在一定的间隙。永磁体与铁磁壁面之间形成闭合的磁场,为爬壁机器人提供足够的吸附力,使爬壁机器人能够在垂直水冷壁铁磁壁面上运动。
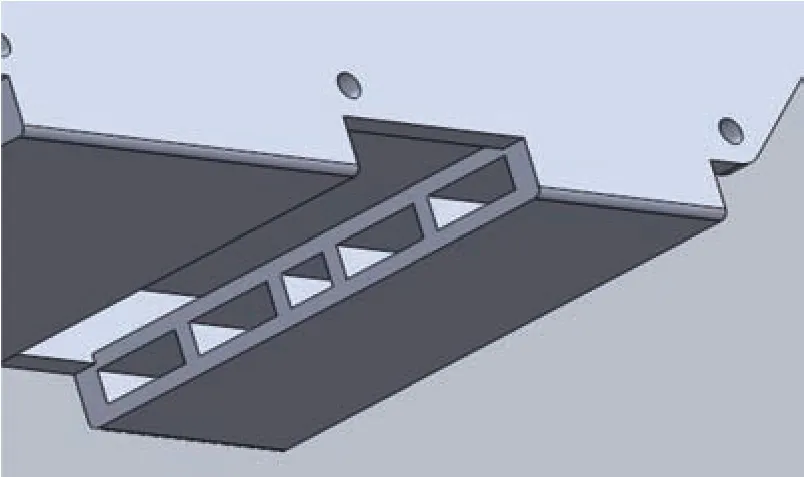
图2 机器人底部结构
3 磁吸附力的有限元分析
设计永磁爬壁机器人时,需要对由永磁体的磁场进行计算分析。本文采用有限元方法,仿真计算磁吸附力的大小。另外,由于爬壁机器人的运动速度低,可以近似的看作静态磁场。
3.1 数学模型的建立
根据麦克斯韦方程组可知在恒定磁场当中,磁场强度H和磁感强度B分别遵守安培全电流定律和磁场高斯定律。

式中:J为电流密度;L为介质磁导率;对于各向同性的磁介质,μ或者为常数,或者是磁感应强度B的函数。磁感应强度B的散度恒等于零,为了便于计算,在旋度磁场中可以定义一个向量磁位A,使:

并且规定:

由公式(3)和(7)可得泊松方程:

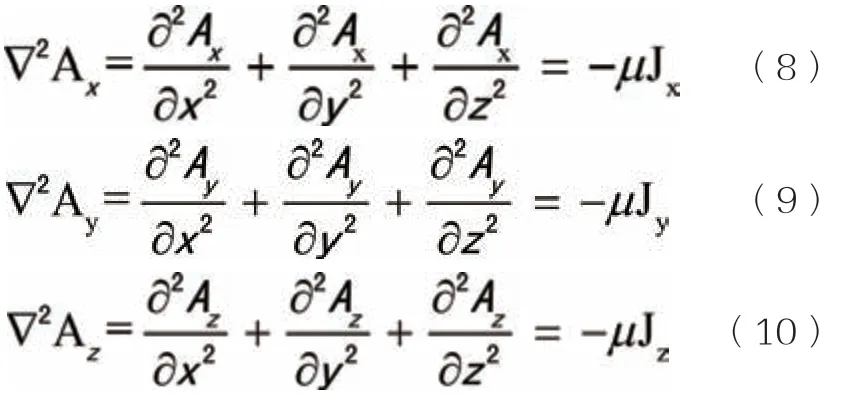
在直角坐标系,经过运算可知,2A恰好等于标量拉普拉斯算符▽2分别作用于Ax,Ay,Az所组成的向量,即:

此时整个向量方程式可以分解成三个标量方程式,即:
在二维磁场中,J=JZk,Jx=Jy=0,A=Azk,Ax=Ay=0。故只要求解Az的二维泊松方程即可,即:

结合麦克斯韦边界条件,将本模型化简为:
式中:Az—简写为A;
Ω—整个求解区域;
Γ1—与磁力线重合的边界;
Γ2—对称的边界,所有的磁力线都垂直地通过它;
(4)饮水。农村居民的饮水困难基本解决。2015年全国农村93%的人口已用上了受保护水源供应的改良饮用水。2017年全国贫困地区89.2%的农户饮水困难[注]饮水困难标准是指居民点到取水点的水平距离大于1公里或垂直高差超过100米,正常年份连续缺水70~100天。已经解决,70%的农户使用管道供水。
L′—不同介质间的交界线;
L—有永磁束缚电流存在的界限。
3.2 吸附力求解
根据Maxwell张力方法,当闭合面S处于均匀且各向同性的介质中时,作用在磁体上的合力F可用应力张量T的面积分来计算:

式中:S—包围永磁体、处于空气介质中的闭合面;
n—面积dS的外法线方向的单位矢量;
B—闭合面S上的磁感应强度;
μ0—空气的磁导率。
3.3 基于Ansoft Maxwell的吸附力计算
在Ansoft Maxwell仿真软件中对爬壁机器人所用的永磁体,以及铁磁壁面和空气进行参数的设定,软件中自带这三种材料或介质,所以在软件的材料库直接选择即可,然后进行设置边界调节,对材料进行网格划分以及关键的求解设置,最后仿真之后磁场分布见图3所示,然后计算永磁爬壁机器人整体吸附力随离开铁磁壁面距离的变化,同时计算爬壁机器人永磁体吸附力随铁磁壁面厚度的变化关系,如图4、图5所示。

图3 磁场分布图
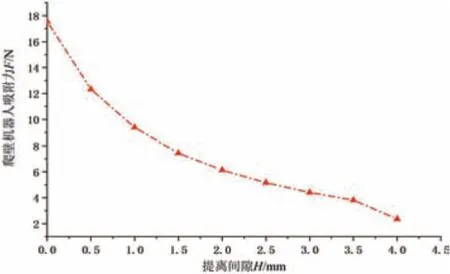
图4 吸附力随间隙变化
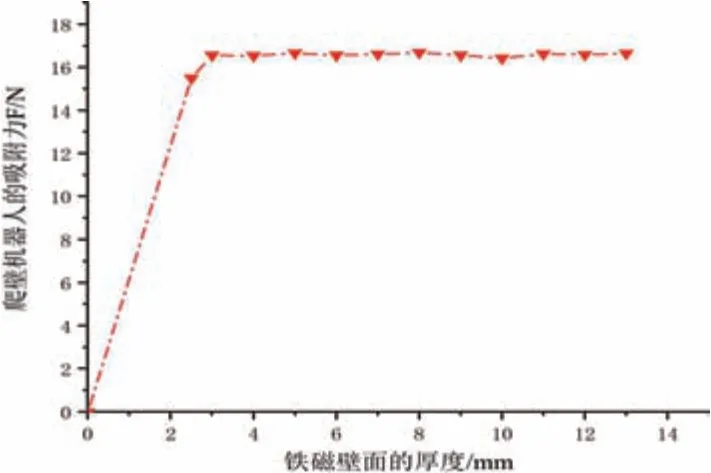
图5 吸附力随壁面厚度变化
经过仿真计算后发现永磁爬壁机器人和铁磁壁面之间的磁吸力为17.4N,而爬壁机器人的总质量为1kg,选用的永磁吸附滚轮与铁磁壁面之间的摩擦系数是为0.7,计算发现永磁吸附滚轮与铁磁壁面之间的摩擦力大于爬壁机器人的总重力,爬壁机器人在垂直锅炉水冷壁铁磁壁面上运动时,可以牢牢吸附在铁磁表面上,同时在永磁吸附滚轮中永磁体也可以提供一定的吸附力,使得爬壁机器人可以正常工作。
当永磁爬壁机器人与铁磁壁面之间的提离间隙为0时,此时永磁爬壁机器人和铁磁壁面之间的磁吸力最大,当提离间隙增大时,永磁爬壁机器人与铁磁壁面之间的吸附力减小,当提离间隙增大至0.8mm时,永磁爬壁机器人有可能出现脱落现象。当壁厚大于3mm时,永磁爬壁机器人与铁磁壁面吸附力已经趋近饱和,随着壁厚的进一步增大吸附力基本无变化,而在实际应用中,应着重考虑永磁爬壁机器人与铁磁壁面之间的提离间隙,这关系到永磁爬壁机器人是否有良好的越障能力。在后期电力行业机器人的开发中,可以采用吸附力更大的电磁机构,使爬壁机器人具备携带作业工具的能力,同时具备更强的越障能力,从而完成火电锅炉自动化清洗的作业任务。
4 爬壁机器人控制系统设计
永磁吸附机器人控制系统是实现机器人智能控制的前提和基础,爬壁机器人的控制系统设计思路可分为三部分:单片机控制模块、无线收发模块、电机驱动模块。三个部分协调配合,模块化的设计便于检测错误,同时也便于模块拆装。单片机控制模块部分采用嵌入式单片机,爬壁机器人整个硬件系统主要包括单片机、设计的电源转换模块、无线收发模块以及电机控制模块。后期,在火电锅炉内部实际应用时由于信号传输条件差可以采用有线连接到上位机的方式,以提高系统信号传输的稳定性。
4.1 无线收发模块的选型与设计
无线收发模块采用nRF905,如图6所示,此模块是挪威公司推出的一款单片射频发射器芯片,采用32引脚5mm×5mmQFN进行封装。芯片由功率放大器、频率合成器、接收解调器、调制器以及晶体振荡器等多个部分组成,该芯片不需要外加滤波器也具备良好的通信效果,可以在相关的软件中设置空闲模式以及关机模式。芯片可应用于节能设计,适合工业数据的采集、安全系统以及无线报警,在诸多领域中都有应用。

图6 nRF905无线模块实物
4.2 无线控制模块
无线收发系统采用STC89C52RC单片机作为微控制器,与设计好的nRF905无线收发模块相互连接,使爬壁机器人的系统具备无线信号传输的功能。爬壁机器人的硬件系统由一对配置nRF905模块的通信底板构成,该系统中其中一端作为发送端,另一端作为接收端。在STC89C52RC单片机系统中可以增加一些按钮,以实现人工操作的数据和发送。整个系统采用9V直流电源供电,由于单片机和无线模块所需工作电压不同,因此需外加电源转换模块,将电源的9V电压分别转换成5V和3.3V为单片机和无线模块供电。同时,水冷壁爬壁机器人也可以采用线缆控制的方法提高信号传输的质量。
4.3 电机驱动模块
控制器、功率变换器及电动机三部分组成了电机的驱动系统,爬壁机器人的电机要求具备较高的转矩以及高可靠性。电机控制模块主要包括电源管理部分、光耦隔离电路以及外部电路的设计。电机模块采用9V直流电源供电,无需进行电源转换。因为数字信号强度与射频信号强度差别较大,必须对信号进行恰当的隔离和屏蔽,数字信号与射频信号之间的相互干扰。因此,在电机模块中光耦隔离电路的设计尤为关键。如果不加以设计,直流电机在启动和换向时可能出现“打火”现象,在电流过大也会对控制信号产生干扰。采用光耦隔离,将电机控制模块和无线控制模块相互分离开来,不存在直接的连接,这样可以提高整个系统抗干扰能力。NEC2501是高压单通道光耦,光耦的内部由NPN型光电晶体管以及发光二极管组成。经过测试,在光耦两侧电阻R1、R2分别选用4.7k和100k阻值的电阻,VCC端外接5V电源,可以保证无线信号稳定。
4.4 爬壁试验
在完成了爬壁机器人的结构设计、运动方式以及爬壁机器人的控制系统选择后,通过在水平地面的运动、水平地面到垂直铁磁壁面的切换,以及在垂直铁磁壁面的前进转向等动作,爬壁机器人均可实现预期的爬壁运动,且爬壁机器人具备一定的越障能力。同时,在火力发电锅炉内部也进行了相应的爬壁试验,设计的爬壁机器人在锅炉内部可以完成转向及越障功能,后期可携带锅炉内部除锈以及除垢的清洗工具,实现对船舶锅炉内壁的自动化清洗工作,达到降低人工作业成本的目的,爬壁机器人的运动如图7所示。

图7 永磁爬壁机器人
5 结论
通过参考国内外同类爬壁机器人的相关技术,设计了永磁吸附式爬壁机器人。爬壁机器人的上位机与控制模块之间通信良好,同时选用的无线收发模块加上遥控装置即可实现对爬壁机器人的远程控制。永磁吸附式爬壁机器人可以实现水平地面的运动、水平地面到垂直铁磁壁面的切换,以及在垂直铁磁壁面的前进转向等动作,爬壁机器人也有一定的越障能力。
同时,由嵌入式单片机和无线模块组成的收发系统,还可以应用到工业数据采集等其他领域,具有一定的市场推广价值,考虑爬壁机器人的工作环境为锅炉水冷壁,采用无线通信的永磁爬壁小车在锅炉水冷壁存在信号传输不良的问题,后期实际应用时可以采用线缆控制与无线控制相结合的方法提高爬壁机器人的信号传输质量。本文设计的永磁吸附式爬壁机器人,可应用于火力发电船舶锅炉水冷壁的除锈以及除垢等工作,相关理论以及试验研究对后期电力行业应用机器人也有一定借鉴意义。
