GFDM系统中基于实部反馈和Levenberg-Marquard算法的自适应预失真方案*
2022-12-07牛安东刘佳宁李英善
苗 硕,牛安东,刘佳宁,李英善
(1.南开大学 电子信息与光学工程学院,天津 300350;2.天津市光电传感器与传感网络技术重点实验室,天津 300350)
0 引 言
2009年提出的广义频分复用技术(Generalized Frequency Division Multiplexing,GFDM)[1]是一种新型的非正交多载波技术,其将时间和频率资源分为独立的块,每个子载波包含一定的子符号,可以通过调整子符号数、子载波数、原型滤波器等参数兼容其他多载波技术,符合第五代通信系统对于灵活性的需求[2]。同时,由于GFDM配备了软脉冲整形和循环前缀(Cyclic Prefix,CP),其不仅继承了传统正交频分复用技术(Orthogonal Frequency Division Multiplexing,OFDM)技术抗多径干扰、易于硬件实现等优势,而且相比OFDM技术有更低的带外辐射和更高的频谱效率[3]。然而研究表明,由于其多载波特性,GFDM系统对高功率放大器(High Power Amplifier,HPA)引起的非线性失真同样敏感。为了减少非线性失真带来的影响,需要在HPA之前加入数字预失真器(Digital Predistortion,DPD)。Eun等人[4]提出了基于Volterra级数的预失真处理方法,但是其只能应用在非线性程度较小的情况下,且复杂度较高,运算时间较长。为了降低传统Volterra级数复杂度,Kim等人[5]提出了记忆多项式(Memory Polynomial,MP)模型,只保留了Volterra级数的对角项,同时能够很好地模拟放大器的非线性行为,并且大大减少模型的系数。Landin等人[6]指出,在大功率应用中(例如宏单元基站)HPA的内部噪声是可以忽略不计的,但是在低功耗应用中放大器的内部噪声会对DPD的性能产生影响。胡杰等人[7]提出了一种基于直接学习结构的预失真器训练方法,但是传统的直接学习结构在反馈支路上需要两个高速模数转换器(Analog-to-Digital Converter,ADC),研究表明这些高速ADC通常十分耗电,增加了设计成本和复杂度;另一方面,由于输入信号受到功放非线性的影响,经功放输出后,其反馈信号的带宽通常为输入信号的3~5倍,这就要求数字预失真系统中反馈回路上的ADC具有极高的采样率,然而现有的硬件条件难以满足高采样率的需求[8]。张月等人[9]提出一种基于牛顿法的DPD系数提取方法,可以有效地降低迭代次数,但是在实际情况中计算Hessian矩阵是十分困难的,并且只有在Hessian矩阵可逆时才可继续迭代。
为了解决上述问题,本文提出了一种基于实部反馈和列文伯格-马奎尔特算法的自适应预失真方案(Real Valued Feedback Levenberg-Marquard Predistortion,R-LM-PD)来补偿HPA引起的非线性失真。该技术采用MP模型模拟HPA的逆函数,只利用输出反馈信号和期望信号的实部分量计算预失真器系数。同时,为了解决牛顿算法计算复杂的问题,本文将收敛速度快、计算量小的列文伯格-马奎尔特(Levenberg-Marquard,LM)算法应用于求解预失真器系数。
1 系统模型
1.1 带预失真的GFDM的系统模型
图1为GFDM收发信机框图。在发射机中,其先将输入的二进制的数据向量b进行正交振幅调制(Quadrature Amplitude Modulation,QAM)得到符号向量d。GFDM是一种基于块的多载波调制技术,将符号向量d通过串并变换成数据块D,其中每个GFDM数据块包含N=M×K个数据符号,变换过程用矩阵表示为
(1)
式中:K代表子载波数;M代表每个子载波的符号数;dk,m代表第k个子载波的第m个符号。经过GFDM调制后,即可得到基带信号x,其时域表达式为
(2)
gk,m[n]=g[(n-mK)modN]·wkn。
(3)

为了使发射信号y能够更好地在接收机中被恢复,在本文中加入DPD模块以补偿HPA对其的影响。

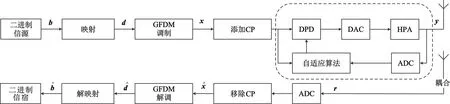
图1 带预失真的GFDM收发信机框图
1.2 HPA模型
本文采用具有记忆性的HPA,具体结构如图2所示,由线性滤波器h1、无记忆的HPA、线性滤波器h2三部分级联组成。

图2 记忆性HPA结构
对于无记忆HPA,本文采用目前技术较为成熟的固态功率放大器(Solid State Power Amplifier,SSPA)。SSPA放大器的AM/AM和AM/PM的特性函数分别表示为[10]
(4)
(5)
式中:p是平滑因子;Asat是HPA的饱和幅度;αr是AM/PM的斜率转换系数;xave是相位开始旋转的位置。
1.3 直接学习结构以及放大器噪声引起的偏差


图3 传统直接学习结构框图


(6)
式中:v是放大器的测量噪声,为零均值的高斯白噪声。
2 基于实部反馈和LM算法的自适应预失真方案
2.1 基于实部反馈的直接学习结构
图4为基于实部反馈的直接学习结构。
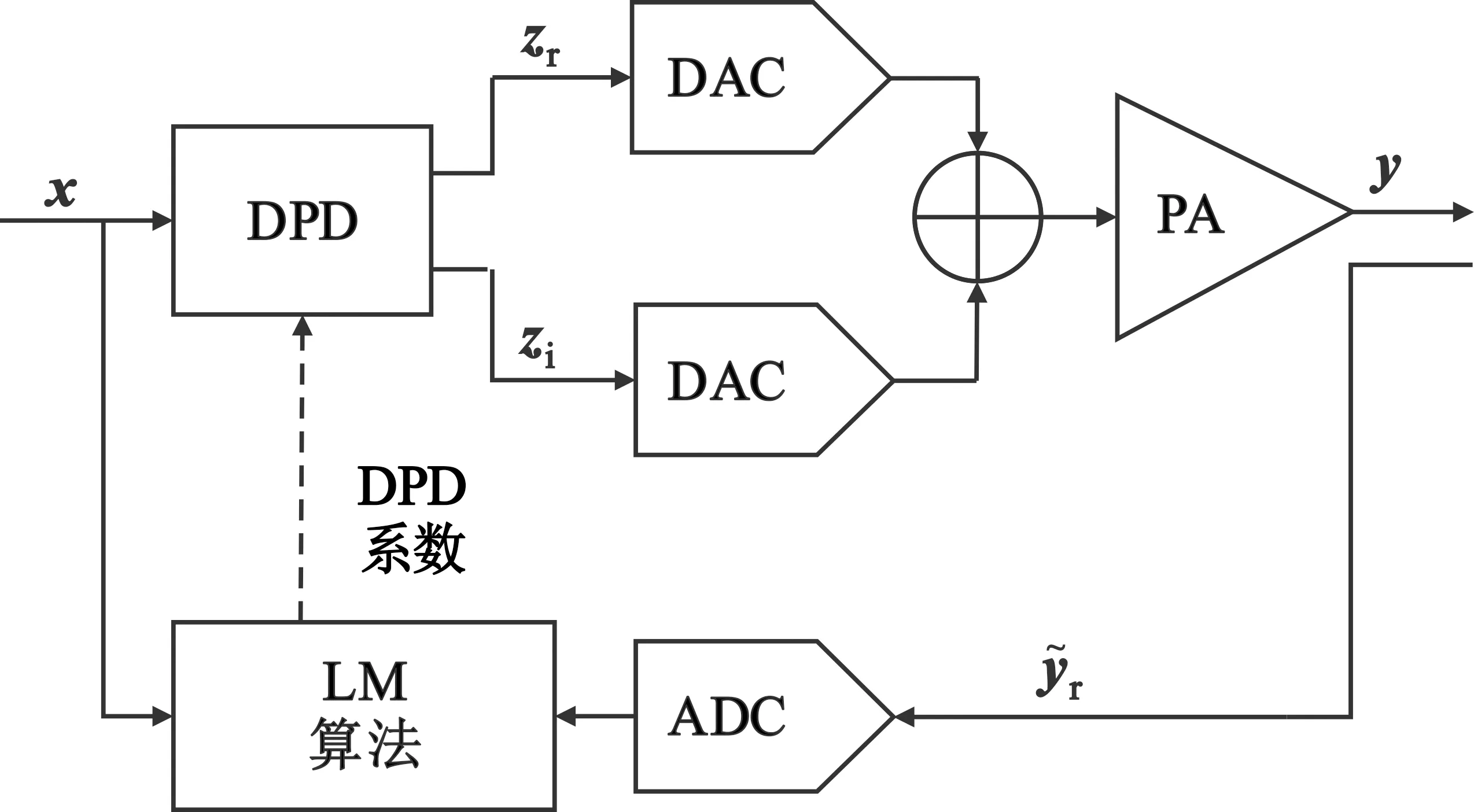
图4 基于实部反馈的直接学习结构
分析和设计HPA线性化电路的第一步是精准模拟放大器的非线性,在本方案中的DPD采用模型简单并且精准度高的记忆多项式模型对HPA进行行为建模。MP模型是Volterra级数模型的一种简化形式,相比复杂的Volterra模型,MP模型只保留了其对角项部分[11]。MP的数学模型表示为
(7)
式中:x(n)和z(n)代表模型的输入和输出;K和Q分别代表模型的非线性阶数和记忆深度;bk,q代表记忆深度为q、阶数为k的多项式对应的系数;相乘项x(n-q)|x(n-q)|k-1叫做基本项,表示为
(8)



其中,b是长度为K(Q+1)的列向量,矩阵Ux的维度是N×K(Q+1),因此公式(7)同样可以写成矩阵形式:
z=Uxb。
(9)
将上式实部和虚部分开得
zr+jzi=(Uxr+jUxi)(br+jbi)。
(10)
继续展开得到
zr+jzi=Uxrbr+jUxibr+jUxrbi-Uxibi。
(11)
将等式的实部和虚部分开写成两个式子:
(12)
将上式写成矩阵形式:
(13)
式(13)可以简写为
(14)
式中:
(15)
2.2 利用LM算法求解预失真器系数
本方案使用LM算法求解预失真器系数,求解预失真器系数的过程可以看作是最优化问题。最优化问题是将误差的均方值作为代价函数,并利用最优化算法使其最小化。在本文所提出的基于实部反馈的训练结构中,代价函数定义为
(16)
文献[9]提出利用牛顿法求解预失真器系数,其是基于代价函数的二阶泰勒展开,迭代公式如下:
bm+1=bm-λHm-1gm。
(17)
式中:λ为步长,通常在0~1之间;g为Jacobi矩阵,是代价函数对系数的一阶偏导数;H为Hessian矩阵,为代价函数对系数的二阶偏导数;m为迭代次数。
但是在实际运算中,计算Jacobi矩阵和Hessian矩阵是十分困难的,因为信号在经过预失真器和放大器后会很多的高阶分量,所以为了方便计算,在求解Jacobi矩阵和Hessian矩阵时,可以忽略其中的高阶分量。HPA可以看作是线性的模块,求得对应的Jacobi矩阵为

(18)
同理,对应的Hessian矩阵为

(19)
因此,LM算法迭代公式可以表示为
(20)

3 仿真与分析
为验证本文所提方案对GFDM系统的有效性,采用Matlab2019b平台进行实验仿真。GFDM系统中,载波数K=256,80个有效子载波,子符号数M=16,循环前缀为64。调制方式选用16QAM,滤波器的滚降系数为0.05。图2中的线性滤波器的g1和g2分别为[4]g1=[0.8,0.1]T,g2=[0.9,0.2,.0.1]T。HPA中p=2,G=1.283,αr=0.263,xave=0.25,Asat=1.22。记忆多项式模型非线性阶数K=7,记忆深度Q=3。迭代步长λ=0.8,LM算法迭代次数m=5。并且,为了衡量本方案的补偿性能,分别与传统LMS(Least Mean Square,LMS)算法、文献[7]提出的NFxLMS(Nonlinear Filtered-x Least Mean Square)补偿方案和文献[12]提出RPEM(Recursive Prediction Error Method)补偿方案进行性能对比。
3.1 预失真器对信号的补偿效果
图5为预失真前后的输出功率谱密度曲线,可以看出在没有预失真时,信号的带外频谱扩散十分严重,严重影响系统性能。在经过所提出的R-LM-PD预失真方案后,系统的频谱扩散得到了有效的抑制,并且略好于文献[7]、文献[12]所提出的补偿方案和LMS算法。

图5 功率谱密度性能对比
图6为测量噪声信噪比30 dB时的误比特率(Bit Error Rate,BER)曲线,可以看出受HPA的影响后,系统性能急剧下降,即使在输入功率回退(Input Back-Off,IBO)为8 dB时,系统的性能也没有得到很好的改善。信噪比(Signal-to-Noise Ratio,SNR)为16 dB时,BER还不到10-2。经过LMS算法补偿后,系统的BER性能得到一定的改善,SNR=16 dB时,BER性能降至3.1×10-4,但是系统性能依然不是很理想。使用文献[7]和文献[12]的算法补偿后,SNR=16 dB时,BER性能分别降至1.5×10-5和8.1×10-6,系统性能得到进一步改善。经过本文所提出的预失真器补偿后,在SNR=16 dB时BER性能可达到5.1×10-6,与理想情况非常接近。
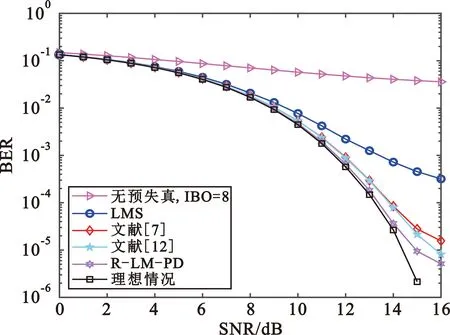
图6 测量噪声信噪比30 dB时误比特率性能对比
图7为不同状态下的16QAM星座图。从图7(c)可以看出,系统受到HPA影响后,失真非常严重,星座点扩散十分严重。如图7(d)所示,在经过预失真器处理后,信号的幅度和相位失真得到了很好的改善,和图7(b)相差不大,系统接近只受AWGN信道情况下的星座图。

图7 SNR=16 dB时16QAM星座图
3.2 放大器测量噪声对系统性能影响
图8为测量噪声信噪比和归一化均方误差(Normalized Mean Square Error,NMSE)之间的关系。NMSE表示期望信号和估计量之间的差异程度,是评价DPD算法性能的一个重要指标。NMSE定义为
(21)
NMSE的值越小,代表算法估计的越精确,性能越好。

图8 放大器测量噪声对预失真器性能影响
从图8中可以看出,测量噪声较大时,LMS算法的NMSE较大。而经过本文提出的R-LM-PD技术处理后,在测量噪声较大时仍有很好的线性化性能。在测量噪声信噪比为10 dB时,本文提出的R-LM-PD技术的NMSE分别比LMS算法、文献[7]和文献[12]的补偿方案降低了22.73 dB、8.13 dB和13.02 dB。随着信噪比的增加,系统受到测量噪声的影响也逐渐减小,测量噪声信噪比为50 dB时,R-LM-PD技术的NMSE分别比其他三种方案降低了5.34 dB、1.93 dB和1.87 dB,相比无预失真时改善了约17 dB。
4 结 论
为解决HPA对GFDM系统带来的影响,本文提出了一种基于实部反馈和LM算法的预失真方案(R-LM-PD),采用MP模型模拟HPA的逆函数,只利用输出反馈信号和期望信号的实部分量计算预失真器系数。同时,本文将LM算法用于求解预失真器系数。大量实验结果表明,本文所提出的预失真方案相比传统直接学习结构可以减少一个反馈支路,简化预失真器训练结构,并且可以有效补偿HPA引起的非线性失真,相比其他方案具有更好的线性化和抗噪声性能,同时有效解决了文献[12]中Hessian矩阵不可逆时无法迭代的局限性,具有良好的工程前景。
