一种曳引电梯制动性能的无载荷检测方法及实现
2022-12-06王月新王佩君沈海峰张兴华
王月新 王佩君 王 毅 沈海峰 张兴华
(1.江苏省特种设备安全监督检验研究院昆山分院 苏州 215000)
(2.南京工业大学 电气工程与控制科学学院 南京 211816)
电梯作为一类应用广泛的特种运输设备,其安全性受到了人们的普遍关注。近年来,由于电梯制动器失效导致的冲顶、蹲底、剪切和挤压等事故屡有发生,而制动力矩不足往往是制动器失效的主要原因[1-2]。为保证电梯的运行安全,除了日常的维护保养,定期的安全检验必不可少。目前,在用电梯制动器的检验,除了人工目测检查外,一般采用载荷制动试验来进行。这种试验需要人工加载砝码,耗费人力物力,由于试验过程轿厢过载严重,可能出现曳引钢丝绳接头断裂、导轨变形、曳引机支撑变形等问题[3]。为此,有必要研究一种简单、方便和安全的在用电梯制动器性能检测方法。
本文提出了一种曳引电梯制动器静态制动性能的无载荷检测方法和检测系统实现方案。该方法利用曳引电机的出力,以曳引电机的输出力矩来补偿轿厢载荷产生的偏载力矩,试验中无须对电梯进行加载,避免了电梯过载试验对电梯结构产生破坏的风险,可大大简化制动器检测过程,降低检验成本,提高检测作业效率,延长电梯的使用寿命。
1 电梯静态制动过程分析
曳引电梯制动系统通常采用的电磁制动器由电磁线圈、制动臂、制动压缩弹簧、制动轮和制动闸瓦等部件组成。常闭块式制动器在曳引电动机工作时松闸,使电梯运转,在失电情况下制动,使轿厢停止运动,并在指定层站上维持其静止状态,供人员和货物进出。
电梯制动器的制动工作模式分为静态制动和动态制动2类。其中静态制动是在电梯平层时,制动器提供合适的静摩擦力矩,以保持电梯静止不动,直到电梯再次启动时松闸[4]。动态制动是当电梯发生故障时(动力电源失电或控制电路电源失电),制动器提供合适的动摩擦紧急制动力矩,将运行中的轿厢制停,制动过程中电梯轿厢的减速度不应超过安全钳动作或轿厢撞击缓冲器所产生的减速度[5]。电梯制动时,制动力矩既不能过小也不能过大。如过小,会导致静态制动时制动轮与制动片之间产生滑动,发生溜车现象;如过大,会导致紧急制停时制动减速度过大,对电梯内乘客造成人身伤害。
依照GB/T 7588.1—2020《电梯制造与安装安全规范 第1部分:乘客电梯和载货电梯》[6]的规定,电梯在静态制动时(轿厢装载工况),应使轿厢在装载125%额定载荷的情况下保持平层状态不打滑。此时要求电梯曳引轮两侧钢丝绳的拉力满足T1/T2≤efα。这里的T1为曳引轮两侧的较大拉力,T2为曳引轮两侧的较小拉力,efα为曳引系数,α为钢丝绳在曳引轮槽中的包角,f为当量摩擦系数,与绳槽材料和形状有关。曳引系数efα限定了钢丝绳与曳引轮不打滑的最大T1/T2比值,efα大,则T1/T2的允许比值大,电梯曳引能力大。
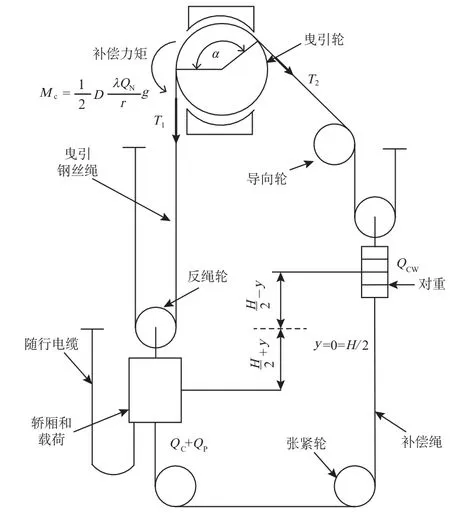
以轿厢和对重均采用2∶1悬挂方式的曳引电机为例,当轿厢加上一定的载荷,处于静态制动平衡状态时,曳引电梯系统的模型如图1所示。为便于分析,做如下简化:忽略导靴和导轨间的摩擦,不计导向轮和反绳轮的质量,轿厢在最顶层站时曳引钢丝绳完全位于对重侧,补偿链/绳完全位于轿厢侧,随行电缆质量完全加于轿厢;轿厢在最底层站时,曳引钢丝绳全部位于轿厢侧,补偿链/绳完全位于对重侧,随行电缆质量不加于轿厢。

图1 曳引电梯加载静态制动试验模型
若曳引钢丝绳与曳引轮之间无打滑(曳引钢丝绳拉力满足T1/T2≤efα),电梯处于静力学平衡状态,电梯轿厢侧钢丝绳拉力T1和对重侧的钢丝绳拉力T2满足方程(1):
式中:
Mf——曳引轮两侧的偏载力矩;
QC——轿厢质量;
QP——载荷质量;
QCW——对重质量;
QSRcar——轿厢侧曳引绳质量;
QSRcwt——对重侧曳引绳质量;
QCRcar——轿厢侧补偿绳质量;
QCRcwt——对重侧补偿绳质量;
QTrav——随行电缆质量;
g——重力加速度;
r——曳引比;
D——曳引轮节圆直径。
设H是提升高度,y是以H/2处作为零点时轿厢的坐标值,当轿厢在底层时y=H/2,轿厢在顶层时y=-H/2,则当轿厢处于井道中的y位置时,轿厢侧和对重侧曳引钢丝绳的质量QSRcar和QSRcwt为:

轿厢侧和对重侧补偿绳的质量QCRcar和QCRcwt为:

随行电缆的质量QTrav为:

式中:
ns——曳引钢丝绳根数;
nc——补偿绳根数;
nt——随行电缆根数;
ρs——曳引绳单位长度质量;
ρc——补偿绳单位长度质量;
ρt——随行电缆单位长度质量。
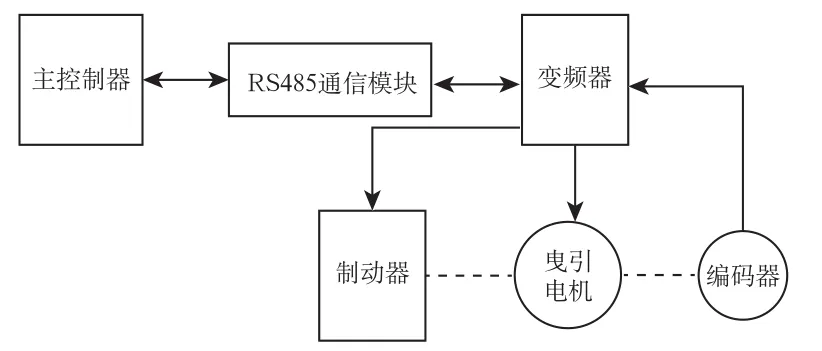
对于无减速器的永磁同步曳引电梯,曳引轮与制动轮同轴,电梯处于静态平衡状态时,制动器需提供的静态制动力矩为Mb=Mf(设T2 式中: QN——额定载荷质量; K——平衡系数,; λ——载荷系数,。 在进行电梯制动性能检测时,制动器提供的制动力矩应按照轿厢空载或装载时在井道的不同位置的最不利情况进行计算。以制动力矩数值较大者作为最不利的工况,来验证电梯制动器是否满足安全性能要求。由一般的力学分析可知,电梯进行制动性能试验时,轿厢空载处在顶层位置静止,以及轿厢加载125%额定负载(试验时的最大负载)处于底层位置静止时,对应的制动力矩最大。以下分别进行分析: 1)轿厢空载处在顶层的制动力矩 当轿厢空载(λ=0)处于顶层静态制动时,y=-H/2,轿厢侧曳引绳的质量QSRcar=0,对重侧曳引绳的质量QSRcwt=nsρsH,轿厢侧补偿绳的质量QCRcar=ncρcH,对重侧补偿绳的质量QCRcwt=0,随行电缆的质量QTrav=ntρtH/2。则轿厢侧的拉力T1和对重侧的拉力T2分别为: 电梯处于静态平衡状态时的制动力矩Mb0=Mf为(T2>T1): 此时作用在曳引轮上的静态制动力矩为逆时针方向(Mb0<0)。 2)轿厢加载125%额定载荷处在底层的制动力矩 当轿厢加载125%额定载荷(λ=1.25)处于底层静态制动时y=H/2,轿厢侧曳引绳的质量QSRcar=nsρsH,对重侧曳引绳的质量QSRcwt=0,轿厢侧补偿绳的质量QCRcar=0,对重侧补偿绳的质量QCRcwt=ncρcH,随行电缆的质量QTrav=0。则轿厢侧的拉力T1和对重侧的拉力T2分别为: 电梯处于静止平衡状态时的制动力矩Mb1.25=Mf为(T2 此时作用在曳引轮上的静态制动力矩为顺时针方向(Mb1.25>0)。 当电梯负载在0~125%的额定载荷间变化时,电梯制动器的静态制动力矩的取值范围在Mb0到Mb1.25之间。 利用曳引电机的转矩输出能力,通过变频器控制曳引电机输出适当的转矩,无须人工加载砝码,就可实现与电梯加载静态制动试验完全等效的制动器性能检测。 在转子磁场旋转坐标系(d-q坐标系)中,三相永磁同步曳引电机的输出转矩为: 式中: Me——输出转矩; Pn——极对数; id——定子电流d轴分量; iq——定子电流q轴分量; Lq——q轴电感; Ld——d轴电感; ψf——转子永磁磁链幅值。 对于永磁同步曳引电梯,若曳引电机以面贴式永磁同步电机(Ld=Lq)驱动,或以内置式永磁同步电机(Ld≠Lq)驱动,并采用id=0的矢量控制,式(10)的电机输出转矩均可简化为: 由式(10)和式(11)可知永磁同步电机的输出转矩由定子电流的d轴、q轴分量id、iq决定。通过坐标系的3/2变换和旋转变换,可以建立id、iq电流与三相电流iA、iB和iC之间的对应关系,因此控制电机的相电流iA、iB和iC就可以控制曳引电机的输出转矩Me。实际上,永磁同步曳引电机由变频器驱动,通过将变频器设置为电流(转矩)控制模式,就可以利用电机的出力,进行电梯制动器性能的无载荷检测试验。 电梯制动器的无载荷静态制动性能测试方法的基本思想是利用曳引电机的输出转矩来补偿轿厢载荷产生的偏载力矩。通过控制变频器输出三相交流电流到曳引电机,使曳引电机输出等效于电梯轿厢加载负荷所产生的偏载力矩,这样就可以用电梯的空载制动试验来替代电梯的负载制动试验。图2是曳引电梯无载荷静态制动试验原理图。 图2 曳引电梯等效无载荷静态制动试验原理图 当电机输出的补偿力矩为式(12)给出的Mc时,该补偿力矩与电梯轿厢加载QP=λQN负荷时产生的偏载力矩相等。 依据上述曳引电梯无载荷静态制动性能检测原理,设计的无载荷静态制动性能试验流程如图3所示,具体实现步骤如下: 图3 曳引电梯无载荷静态制动试验流程 1)电梯轿厢处于空载状态,运行到底层后,电梯制动器制动使轿厢保持静止; 2)曳引电机加载补偿力矩,该力矩为等效于轿厢加载λ倍额定载荷产生的偏载力矩Mc; 3)曳引电机在3~5 s内持续加载补偿力矩(考虑制动器抱闸的滞后延时和电机力矩加载的滞后延时,加载时间可以适当调整); 4)读取编码器,计算曳引电机转速,若曳引电机转速为0,说明轿厢静止不动,电梯制动器能够提供足够大的静态制动力矩,制动器安全性测试通过,测试结束。若曳引电机的转速不为0,说明轿厢产生了位移,电梯制动器的静态制动力矩不足,制动器安全性测试未通过,测试结束。 采用曳引电梯无载荷静态制动性能检测方法对电梯制动性能进行检测,具有操作简单、过程安全和结果准确的特点。理论上这种无载荷静态制动试验与人工加载静态制动试验完全等效。由于试验中无须对电梯进行加载,避免了电梯过载对电梯结构产生破坏的风险,简化了电梯制动器的检测过程,降低了电梯制动器的检验成本。且检测试验不需要电梯系统的参数(与电梯的平衡系数、对重质量和轿厢质量等参数无关),具有极好的通用性。 以某永磁同步曳引电梯为例,该永磁同步曳引电梯参数如下:曳引电机的额定功率PN=11.4 kW,额定转矩MN=650 N.m,额定转速nN=167 r/min,曳引轮节圆直径D=400 mm。电梯平衡系数K=0.48,轿厢质量QC=1 200 kg,额定载重量QN=1 050 kg,钢丝绳的倍率r=2,曳引钢丝绳的数量ns=5,钢丝绳单位长度质量ρs=0.347 kg/m,随行电缆数量nt=1,随行电缆单位长度质量ρt=1.250 kg/m,电梯提升高度H=53 m,18层,重力加速度g=9.81 m/s2。 设平衡补偿链/绳的设计是基于电梯在底层站和最顶层站静止时曳引轮两侧重力差相等来计算,则有 采用本文提出的无载荷静态制动性能测试方法来替代电梯的载荷静态制动性能测试,计算结果见表1。 表1 永磁同步曳引电梯加载125%额定载荷时的制动力矩 表1的计算结果表明,当电梯载荷为125%额定载荷时,曳引电机需加载的补偿力矩Mc为1 287.6 N.m,为电机额定转矩的1.98倍,小于电机的最大输出转矩(2.5MN=1 625 N.m)。这表明采用曳引电机的出力来补偿轿厢负载产生的偏载力矩,以电梯空载制动试验来替代负载制动试验对电梯制动器制动性能进行检测是可行的。当电梯负载在0~125%额定负载时,电梯的制动力矩Mb在Mb0到Mb1.25之间。对于上述永磁同步曳引电机,若电梯安装了补偿链/绳,电梯制动力矩在-478.2 N.m<Mb<809.4 N.m之间变化;若未安装补偿链/绳,电梯制动力矩在-642.3 N.m<Mb<973.6 N.m之间变化。这个计算结果可为电梯安装和运营维护部门选择和调整具有合适制动力矩的制动器提供理论依据。 需要说明的是本文提出的无载荷静态制动性能检测试验,当曳引电机加载补偿力矩时,电机将处在过载堵转状态。通常变频器电机驱动系统不允许长时间的过载堵转,但短时间过载堵转是可以的。实际上,由于永磁同步曳引电机的瞬时最大输出转矩通常可达额定转矩的2~3倍(本文曳引电机的最大输出转矩2.5MN),变频器驱动的曳引电机系统允许的堵转时间一般也都在几十秒以上,而在本文设计的无载荷静态制动试验中,电机堵转加载时间在5 s以内。因此只要试验时曳引电机加载的补偿转矩不大于电机的最大输出转矩,无载荷静态制动试验就是安全的。 基于曳引电梯制动性能的无载荷检测方法原理,本文设计的电梯制动器安全性能检测系统的硬件结构如图4所示,检测系统主要由变频器和上位机及通信模块组成。其中变频器主要完成3项功能:1)驱动曳引机正反转,使得电梯轿厢上行或下行;2)模拟有轿厢载荷时的测试工况,加载补偿力矩(实际操作中加载力矩时要和制动器配合动作);3)与上位机通信,返回永磁同步曳引电机状态信息(电流、转速等)。 图4 检测系统的结构图 上位机由微型电脑和触摸屏组成,上位机上运行检测装置的人机交互界面,测试人员通过人机交互界面发送测试指令给变频器,同时电机的运行状态也可以显示在界面上,上位机与变频器之间采用RS485串口通信方式。上位机向变频器发送的信息有测试环节编号、期望输出力矩、期望转速、采样点数、电机运动方向、测试启停标志;变频器向上位机返回的信息有测试环节编号、实际输出力矩、电机转速、轿厢行程、测试结束标志(返回信息由上位机发出读取指令得到)。 图5为上位机操作界面,测试系统有4种工作模式:检修模式、轿厢加载静态制动测试模式(包括轿厢载荷在0~150%额定载荷之间可调)、动态制动测试模式(载荷在0~125%额定载荷之间可调)和空载超速上行制动测试模式。检修模式下,可以从上位机发出电梯上行或下行指令,采用手动方式,控制轿厢到达测试起始位置。测试状态下,电梯在初始状态下应静止,制动器抱闸。根据制动器安全性能测试的要求,电梯轿厢的位置可预先设定。 图5 测试系统的上位机操作界面 本文提出了一种永磁同步曳引机静态制动性能检测方法及其实现方案。该方法利用曳引电机的出力,通过曳引电机施加与轿厢载荷产生的偏载力矩等值的补偿力矩,以空载制动试验来替代负载制动试验,以实现电梯制动性能的无载荷检测。分析验算和初步实验测试结果表明,这种电梯制动性能的无载荷检测方法可替代传统的人工加载125%额定载荷静态制动试验,简化电梯制动器安全性能检测过程,降低成本,提高检测作业效率。



2 无载荷静态制动性能测试方法
2.1 永磁同步曳引电机的转矩加载原理


2.2 无载荷静态制动性能测试原理和测试流程


3 实际电梯检测计算分析


4 电梯制动器的无载荷检测系统设计

5 结束语
