基于大数据的纯电动汽车节能规划研究
2022-12-06武翔宇
武翔宇
(中汽信息科技(天津)有限公司,天津 300000)
主题词:节能 路径规划 运行分析 能耗最优
1 前言
当前环境和能源问题日益严重,道路交通出行是能源消耗和污染的重要源头,电动汽车成为推动交通节能减排的重要途径。但是,纯电动汽车在使用中面临如下4种情况:
(1)不同交通条件下行驶特性差异大;
(2)车辆运行状态和电池特性有很大关联;
(3)驾驶者驾驶习惯以及充电习惯不同;
(4)充电设施部署较少,需要提前预估当前电量能否支撑到达目的地。
针对这些问题,本文研究结合天津市运行的纯电动汽车数据、GPS轨迹信息以及维基世界地图(Open Street Map,OSM)路网数据(表1),对道路拥堵状况的时变性、方向性,车辆运行状态电池特性,充电桩位置分布,制定路况模型和电动汽车充放电模型,最终达到基于路况的节能动态路径规划,以实现电耗最低、出行效率最高的目标。

表1 数据类别以及用途介绍
本文从路况获取、电耗影响分析、路径规划3部分开展研究。其中,路况获取通过数据处理得到时变路况;电耗影响分析通过提取筛选特征、借助机器学习方法得到单位里程电动汽车电耗的预测模型;路径规划模型,以耦合时间、温度、路况等影响电耗为代价函数,凭借路径规划算法进行纯电动汽车的路径规划(图1)。
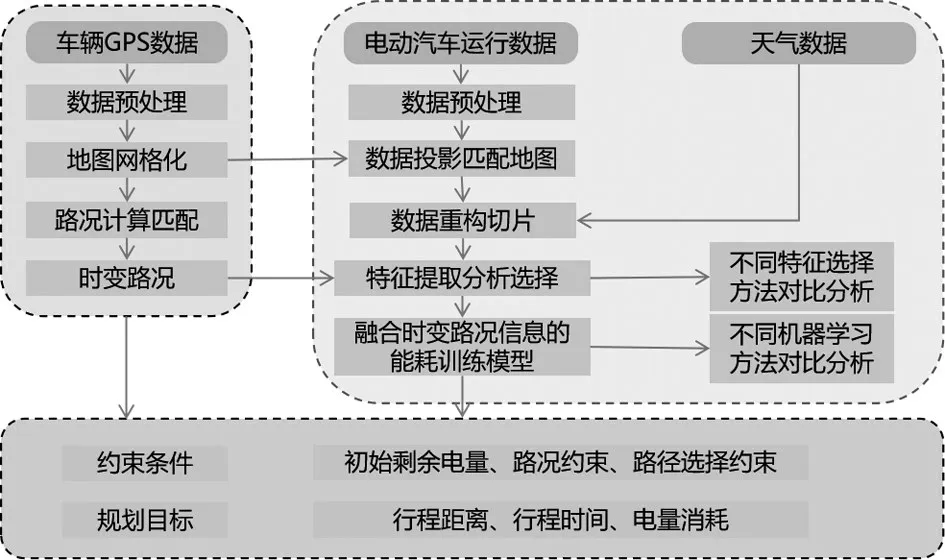
图1 整体研究思路
2 道路状况获取
道路状况获取主要通过数据处理(如数据预处理、地图网格化、路况计算匹配),分析得到时变路况。相同道路在不同时间段道路交通特性变化大,尤其在上班高峰以及平峰阶段。
2.1 数据介绍以及预处理
首先,对获取的车辆运行数据、GPS轨迹信息以及OSM路网数据进行清洗,主要包括:
(1)异常值、重复值、空值数据去除。
(2)不同行程开始、结束连接处数据去除。例如:纯电动网约车在客人上车以及下车时会短暂停车并且发生加减速,这时会对路段阻抗计算产生干扰。针对这种情况会读取车辆状态、识别上车、下车停车点删除停车以及邻近点的数据。
(3)停车数据去除。由于实际用车过程中存在某点停车时间过长,针对这部分数据将轨迹点按照时间排列并计算轨迹点停留时间,最终通过阈值判断是否去除。
(4)数据补充。增加天津市天气数据。数据处理详细流程见图2。
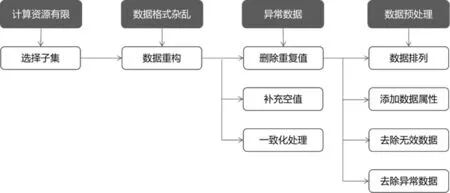
图2 数据处理流程
2.1.1 电动汽车运行数据处理
首先,将运行数据投影到OSM路网结构上。然后,分析车辆从某一个网格行驶一定距离到网格为片段进行重构,对重构的片段采取切片处理[1]。最后,通过提取片段相同特征的数据,设计上下值并进行归一化处理,并选择对应的特征进行训练。数据降维加快模型训练,防止数据过拟合(图3、图4)。
图3 行车轨迹
图4 轨迹投影到路网结构
路径重构切片后结合当前路径的行驶里程和SOC构建路况特征值(图5、图6)。
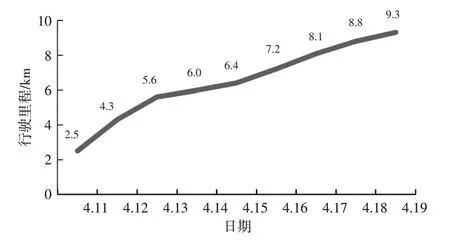
图5 路径4的行驶里程
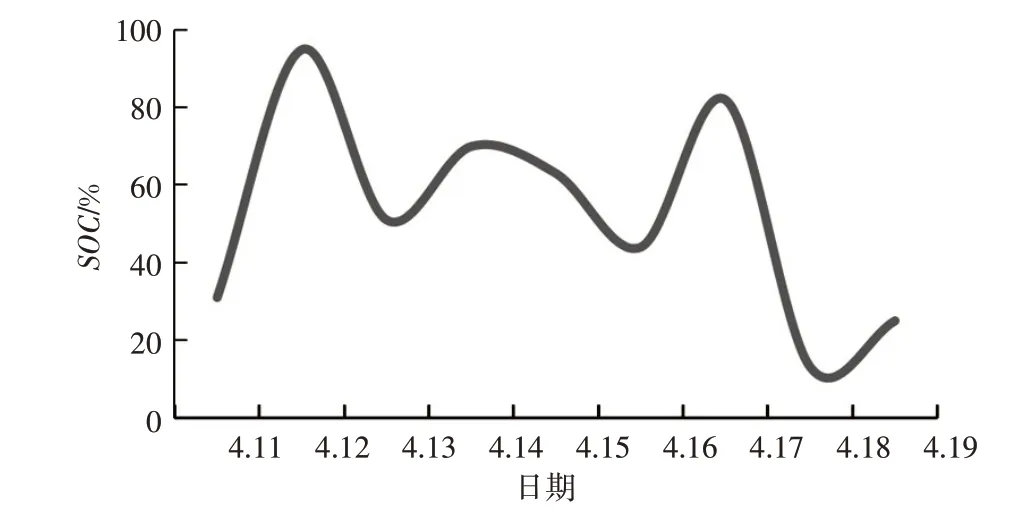
图6 路径4的SOC变化
通过以上方法整合所有路径的特征值,通过算法线性回归、L1正则化、L2正则化、随机森林[2],选择递归特征消除算法(Recursive Feature Elimination,RFE)结果大于0.3的特征进行训练,训练结果见表2。
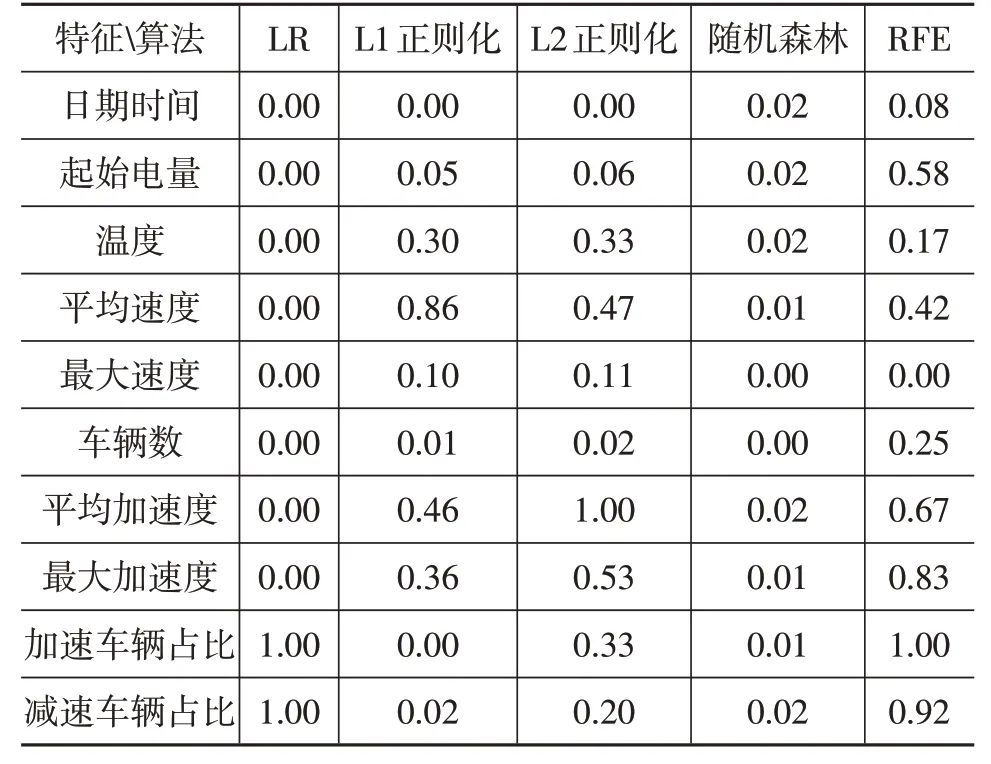
表2 训练结果
2.1.2 GPS数据处理
对存在GPS偏差或者漂移的GPS观测点,通过地图匹配算法调整到路网上[3],具体做法是:
(1)将路段生成40 m的缓冲区;
(2)筛选缓冲区内的轨迹点;
(3)将位于缓冲区的车辆匹配到路段。
GPS数据处理示意见图7。
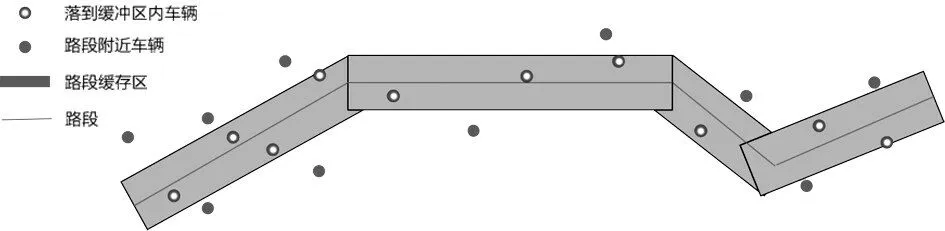
图7 GPS数据处理示意
将车辆的GPS数据筛选出子集数据、去0值、去空值、去孤立点、短空缺处差值处理,处理后结果如图8所示。
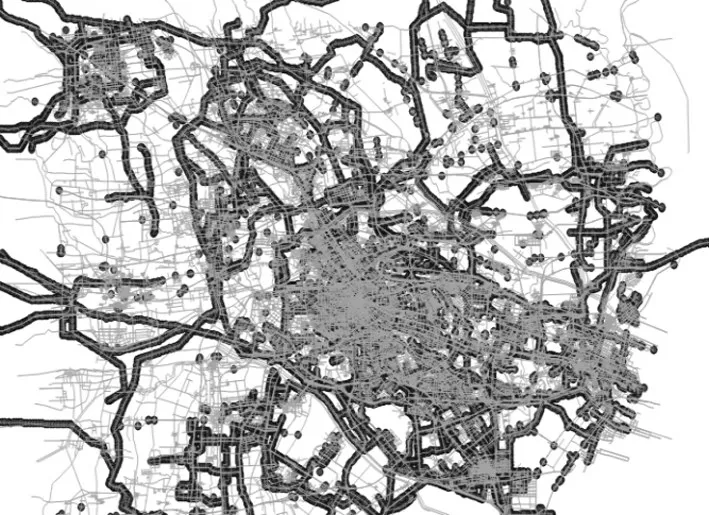
图8 基于维基地图的数据处理后的GPS位置点
2.2 路网交通模型建立
通过道路平均时速和拥堵指数表征路网交通模型。本模型构建的地图路网数据经过用户可能面临驾驶场景的测试,验证了模型包含的要素信息,精确地表达了路网厘米级三维表征,为车辆的预判和安全行驶提供了有效保障。
2.2.1 道路平均时速统计
根据已有路段平均时速计算,并且分方向、分时段统计道路平均速度。然后,将数据重构切片,将车速为0的数据去掉,处理后结果参见表3和图9。
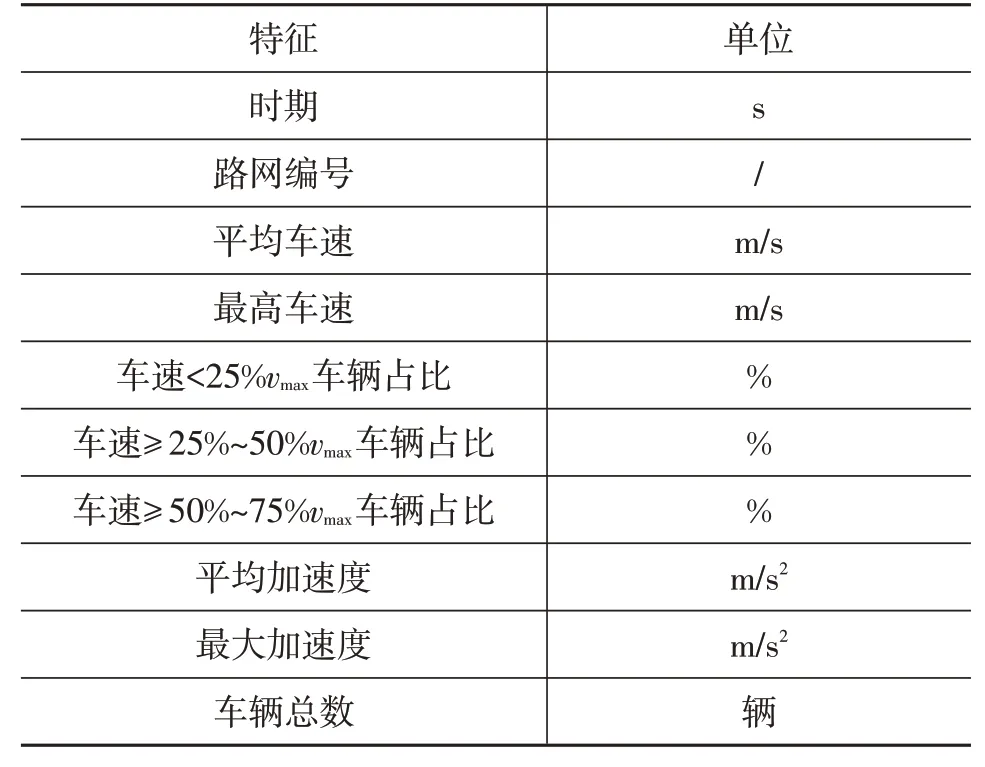
表3 数据重构切片

图9 基于维基地图的不同时刻划分轨迹聚合
同一道路不同方向的交通状况可能差异较大,需要对双向车道的路段分方向分别计算。
构建分方向的路段连接表。路段1、2是单向车道,车道编号只有一个。路段3、4是双向车道,车道编号有2个,依次类推4向车道编号就有4个车道编号,按照此规律计算车辆轨迹点坐标差值确认行车方向以及车辆,将数据投影到相应路段。平均行程车速的计算公式如式(1)。
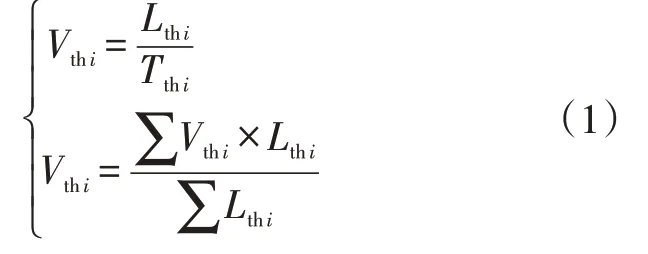
式中,Vthi表示车h在t时刻在路段i上的平均行程车速;Lthi表示车h在t时刻在路段i上的行驶距离;Tthi表示车h在t时刻在路段i上的行驶时间。
考虑到同一路段相邻时刻交通状况较为相似,优先使用后一邻近时刻的速度填充。如某路段全体时刻均无数据则计算该时刻相同等级道路速度的平均值以及方差,根据正态分布得到该路段的速度。
2.2.2 道路交通拥堵表征模型
道路拥堵指数是根据道路通信情况,设置的综合反应道路网畅通或拥堵的概念性数值,相当于把拥堵情况数字化(图10)。
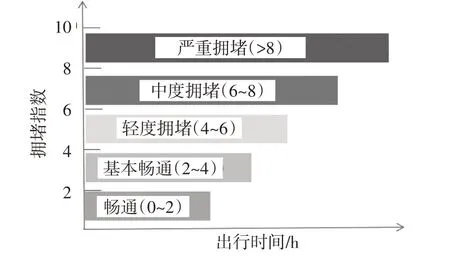
图10 道路交通拥堵表征
交通拥堵指数(Tralfic Rerformance Index,TPI)的计算公式:

式中,ITPI为交通拥堵指数;Vi为该路段自由流速;v为车辆运行速度。
3 汽车充耗电模型
计算新能源汽车路段平均消耗电量时,首先将数据预处理,去掉空值、异常值数据。其次,针对不同状态的车辆进行分类,包括启动状态、行驶状态、充电状态,电流数据为正值表示能量输出。统计相同路段不同车辆行驶的能耗信息计算出该路段平均电量消耗值[4]。车辆路段平均电耗计算过程示意如图11,并以此为基础得到天津市所有路段的平均电耗地图。
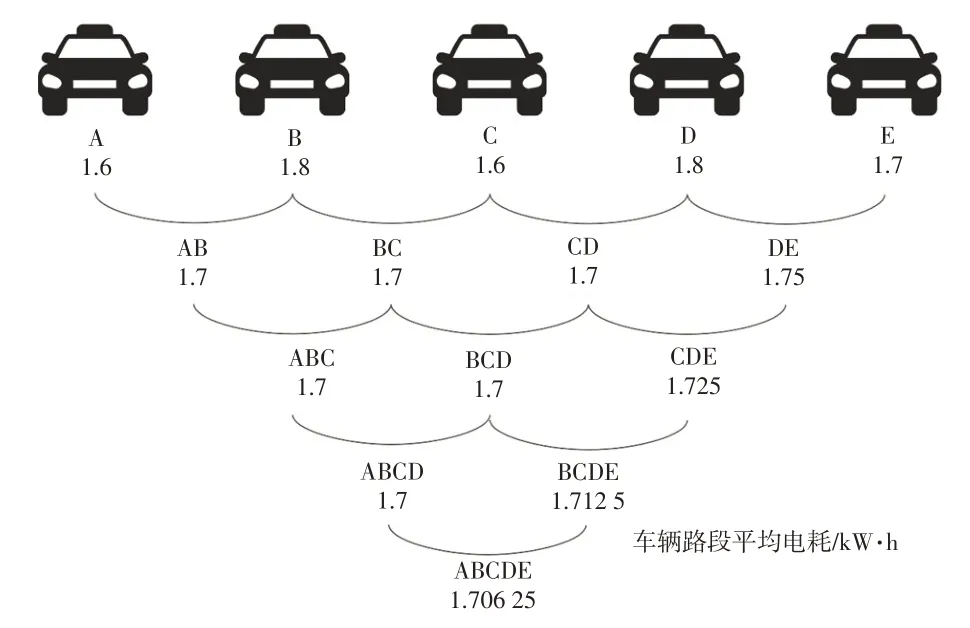
图11 车辆路段平均电耗计算
从充电吧等第3方充电桩企业得到天津市所有充电桩数据,将位置可视化展示在地图上。
4 路径规划模型构建
路径规划研究基于时间和能耗2个维度构建,算法设计标号修改和标号设计算法相结合的两阶段动态规算法,整体思路见图12。
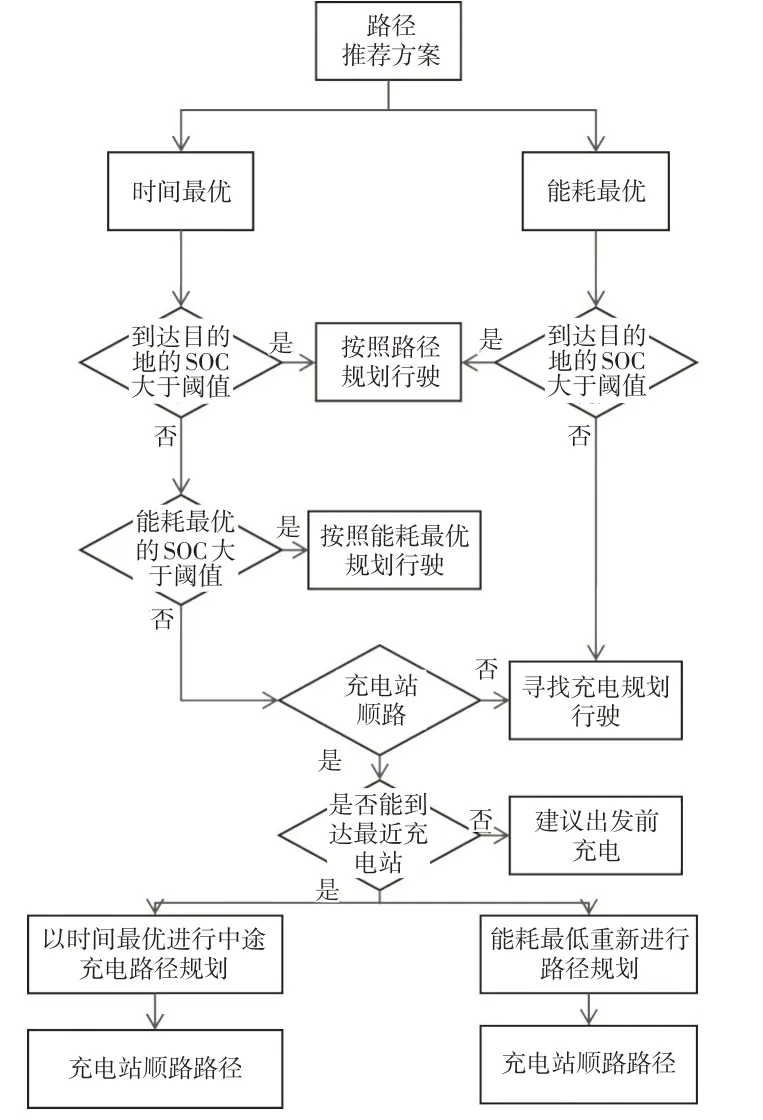
图12 路径规划模型构建思路
4.1 模型构建
基于能耗混合整数规划模型的构建思路是汽车行驶电量在不同行驶路线下的消耗问题,分析约束条件、建立模型。设计汽车电耗算法和优化的规则。
模型1:从出发起点s到终点e的最低能耗模型,最小化总行程能耗如式(3)。

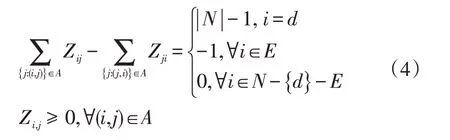
式中,Bse(Z)表示出发点s到终点e行程能耗;Zij表示路段ij平均电耗;bij表示路段ij的道路拥堵指数。基于能耗的混合整数规划模型如式(4)。
模型2:确定出行起点到出行终点d的时间最短模型[5],最小化总行程时间,如式(5)。

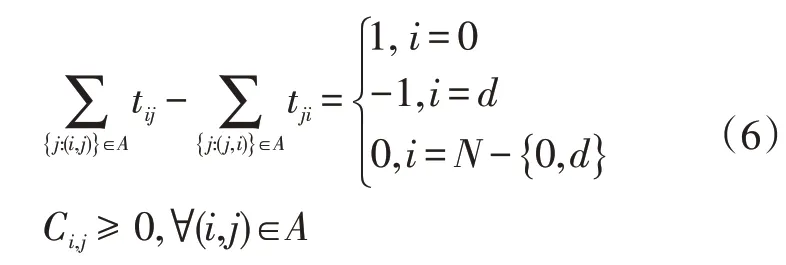
式中,T(c)表示出发点s到终点d的时间;tij表示路段ij的平均时间;bij表示路段ij的道路拥堵指数。基于时间的混合整数规划模型如式(6)。
4.2 算法设计
基于时间的混合整数规划模型的构建思路是汽车行驶时间在不同行驶路线下的消耗问题,分析约束条件、建立模型。设计汽车耗时算法和优化的规则。
算法1表示出行终点d到最近的充电节点的标号设定算法[6],详细设计步骤如下:
第1步:初始化操作
设置节点初始标号:

设置永久标号集合:M={ },临时标号集合N={r},式中,er表示充电路段r;ei表示充电路段i;ej表示充电路段j;eL+eLj表示充电路段L+Lj。
第2步:标号修改
选出节点:
搜索所有与节点L相连的节点,按下述条件修改标号:

将节点L的标号加入集合M,节点j加入集合N。
第3步:终止判断若|N|=0,算法终止,否则返回第2步。
算法2:出行起点o到出行终点d出双标号双准则标号修改算法,详细设计步骤如下:
第1步:节点标号初始化
设置节点初始标号:
式中,Lr表示行驶路段r;Li表示行驶路段i;Lk表示行驶路段k;Lj表示行驶路段j。
设置初始标号队列:S:={r}
第2步:标号修改
若fk+tij≤tk,ek+vij≤ej且至少有一个不取等号,则更新标号:

若fk+tij≥tk,ek+vij≥ej,j则不需要更新标号;
若是其它情况,则为节点j增加标号,且将标号j加入到队列Q中式中,fk表示k路段消耗电量,tk表示k路段消耗时间
第3步:算法终止判断若|S|=0算法终止,否则,返回第2步[7]。
5 实测结果
基于2个决策来判定,分别是在当前电量状态下能否到达目的地、在行驶途中的充电选择(充电点和充电量),截取车辆数据(采集ID:2326)新能源汽车(早晚高峰、平日)的行驶数据[8]。其次,车辆行驶场景定义4种分别为:
场景1:充电+使用+行程结束;
场景2:充电+使用+充电+行程结束;
场景3:使用+行程结束;
场景4:使用+充电+行程结束。
最终得到求解行驶路径特征值如表4,综合优化求解路径如图13。

图13 基于维基地图求解结果
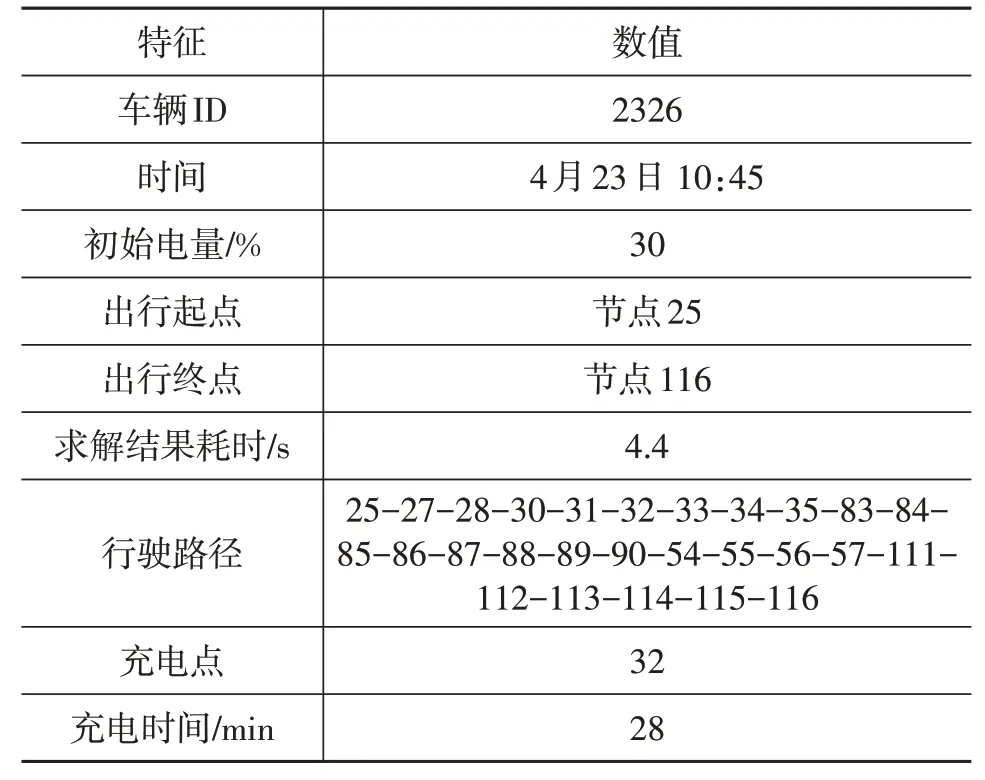
表4 求解行驶路径特征值
不同车辆(ID 2326、3824)在3个时段的优化结果与实际路径能耗对比如图14、图15。
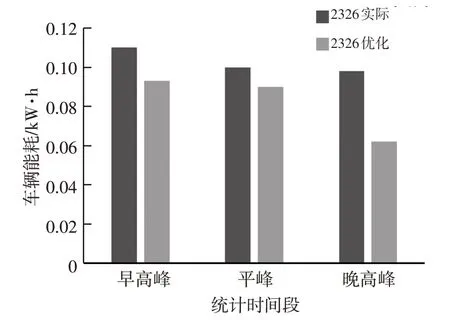
图14 ID2326优化结果对比
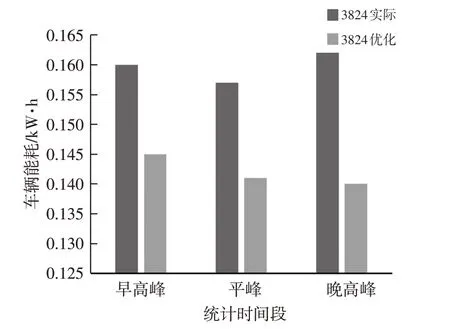
图15 ID3824优化结果对比
通过结果优化比较得出如下结论:
(1)2326号车辆在早高峰能耗节省15%,平峰能耗节省10%,晚高峰能耗节省36%。平均能耗优化率23%。
(2)3824号车辆在早高峰能耗节省9.3%,平峰能耗节省10.1%,晚高峰能耗节省12.3%。平均能耗优化率11.2%。
最终按照上述方法统计所有车辆的平均能耗优化率,最终得到能耗优化平均值10.2%。
6 总结与展望
本文确定基于交通信息影响下的电动汽车路径规划研究路线,设计了基于定位数据以及电动车运行数据的预处理模型,通过网格划分建立交通路网拓扑,作为获取路况及路径规划的数据基础包括:建立电动汽车能耗模型预测、建立电动汽车路径规划模型。
主要创新点包括建模方面建立充电行驶阶段路径规划模型、制定时间和电耗双准则优化目标。算法方面针对两阶段模型开发出标号修改与设定的两阶动态算法,为路径选择和充电决策提供依据。
