基于行驶路况的混合动力汽车能量管理分析
2022-12-06伍庆龙于长虹王燕
伍庆龙 于长虹 王燕
(1.中国第一汽车股份有限公司新能源开发院,长春 130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春 130013)
主题词:混合动力汽车 行驶路况 能量管理 控制策略
1 Introduction
In order to effectively reduce automobile fuel consumption and exhaust emissions,and meet the requirements of laws and policies,more and more automobile manufacturers have paid extensive attention to new energy vehicles and actively promoted the research and development of new electric vehicles[1].Moreover,with the rapid development of automotive dynamic system,electrification is taking larger proportion in automotive dynamic system,and hybrid dynamic system has become one of the most effective technologies to reduce fuel consumption[2].
Reasonable energy management and torque distribution of hybrid electric vehicles are the key technologies to achieve energy conservation and emission reduction,and the related control strategies have become the core technologies to solve these problems[3-5].Due to the addition of high-voltage battery and traction motor,the energy management of hybrid electric vehicles becomes more diverse and complex.With the development of vehicle intelligent network technology,energy management and control strategies based on driving road condition prediction have gradually attracted attention.
In view of these backgrounds,under the trend of the gradual maturity of vehicle intelligent network technology,this paper judges and predicts the future driving road condition by analyzing different methods of obtaining vehicle driving status.A variety of control optimization strategies for hybrid electric vehicle are analyzed to make the control strategies more intelligent and efficient.These strategies provide references for engineering developers.
2 Methods for Obtaining Vehicle Driving Road Condition Information
2.1 Road Condition Acquisition Based on Navigation System
With the development of satellite positioning technology and information technology,road congestion,closure,construction and other road condition information are obtained through the Internet and navigation system.The navigation device obtains the road condition information of the current vehicle location,and then transmits the road condition information of the current vehicle location and driving direction to the on-board terminal such as Tbox.The on-board terminal processes the road condition information sent by the navigation equipment,and then Hybrid Control Unit(HCU)identifies the driving condition of the on-board terminal,and finally obtains the working conditions of the vehicle through internal procedures.
The on-board terminal converts the format of the original data provided by the navigation,and then sends a request to the server after recognizing the current position and driving direction of the vehicle through the GPS positioning module.The server sends condition information of road where the vehicle is located to the on-board terminal through the General Packt Radio Service(GPRS)network.The road condition information obtained by this method covers the widest range,including the main urban roads,intercity expressways and national and provincial roads in the country.
2.2 Road Condition Acquisition Based on Intelligent Transportation System
Intelligent Transportation System(ITS)is a real-time,accurate,efficient,large-scale and all-round traffic management system established by integrating advanced electronic technology,information technology,sensor technology and engineering technology into ground traffic management on the basis of relatively perfect road facilities[6].The information provided by intelligent transportation system includes traffic congestion,traffic accidents,traffic control,parking spaces,etc.
At present,the well-known intelligent transportation systems include Japan's Vehicle Information and Communication System(VICS),Europe's RDS-TMC system and the United States'TRAVTEK system.These are mature intelligent transportation application systems,which provide real-time traffic condition information for drivers and assist vehicles with planning navigation paths.
Relevant technical standards and communication protocols have been formulated for RDS-TMC technology in the country.The receiving devices are developed by using the relevant standards and communication protocols,and road condition information is obtained in any city with RDS-TMC services.RDS-TMC receiving device is developed by using technical standards and communication protocols,and the received road condition information is transmitted to the vehicle controller after being identified by the on-board terminal.
2.3 Road Condition Acquisition Based on Historical Driving Data
At present,the road condition information based on historical driving data statistics is queried through the internet driving map.These road condition information is tabulated according to road name,time,longitude and latitude stored in the on-board terminal in the form of tables,and then the time,longitude and latitude information obtained by the GPS module are compared with the time in the table to predict the future road condition information.Then the road condition information is transmitted to HCU for control strategy development.In addition,to solve the storage problem,the predicted road condition data is stored in the computer server.The on-board terminal sends the detected location information and driving direction information to the server through the network,and then the computer server retrieves the database and returns the road condition information to the onboard terminal.
The on-board terminal module and the HCU controller first exchange working condition data to obtain basic information such as vehicle speed and vehicle running state,and then send it to the remote server through the GPRS module.The remote server clusters the running state of the vehicle,and then constructs a driving cycle with time series by using the main characteristic parameters,so as to realize the self-learning of electric vehicle road conditions based on historical data,and feedback the self-learning working condition results to the vehicle.
2.4 Road Condition Acquisition Based on Driving Habits
By studying the driving habits of vehicle drivers,the road condition information related to driving habits is obtained,including time,speed,daily average driving mileage,average charging mileage interval,and the corresponding geographical coordinates.
The vehicle speed is obtained through the Electronic Stability Program(ESP)or HCU;the daily average mileage is obtained through calculation of mileage and time;the average mileage interval of charging is obtained through calculation of charging and time,and the geographic location information is obtained through the GPS module.The HCU controller processes the acquired data,forms the database and updates it continuously.When the vehicle is running,it judges the road condition information through the date,time period,longitude and latitude information and driving direction,and predicts the future driving road condition information through the daily average driving mileage,charging driving mileage,driving direction and vehicle speed.
The above data is processed and a knowledge base is formed.The structure of the knowledge base is as follows:
(1)A week is divided into 7 days.
(2)Each day is divided into different periods.
(3)Vehicle speed is divided into different grades in each period.
(4)There are different memory units in each grade.
(5)Each unit stores longitude and latitude,current charging mileage,driving direction,vehicle speed.
The information of the above storage unit is constantly updated.When the vehicle is running,the road condition information is judged by the date,time period,longitude and latitude information and driving direction.The future road condition and driving mileage are predicted by the daily average driving mileage,charging driving mileage,driving direction,vehicle speed.
3 Driving Road Condition Prediction
3.1 Driving Condition Characteristic Parameters
According to the vehicle driving road condition characteristic parameters,including average speed,maximum speed,maximum acceleration,maximum deceleration,average acceleration,average deceleration,idle time and parking times.The orthogonal optimization design method is used to analyze the main characteristic parameters.The fuel economy of the vehicle is taken as the evaluation index,and the main influencing factors are analyzed by using the orthogonal optimization theory.The average speed,average speed during driving,idle time percentage,average acceleration and average deceleration are determined as the main parameters,and then the unknown driving road conditions are identified and predicted according to these parameters.
3.2 Road Condition Information Prediction
Through the on-board terminal,the real-time driving parameters of the vehicle are collected,and after a certain period(such as 10 s),the driving condition characteristic parameters of the data are extracted.Through the fuzzy identification method,the actual driving condition is matched with the standard driving condition,the category of the actual driving condition is identified,and the actual driving condition data is stored in the database and the database becomes more complete.Then,the database is used to predict the driving condition of the next stage by identifying the current driving condition of the vehicle.
The on-board terminal obtains the vehicle driving parameters from the CAN bus in real time,transmits them to the remote computer through the network,stores the real-time data in the database,and then the HCU reads the vehicle driving data from the database and predicts the next driving road condition.
4 Analysis of Hybrid System Control Strategies
4.1 Control Strategies of Hybrid Electric Energy Consumption
For the energy management strategy of plug-in hybrid control,two aspects are studied:driving mileage optimization in pure electric drive mode and torque distribution between motor and engine in power consumption mode.In the power consumption mode,the degree of engine participation in driving is closely related to the road conditions.The control strategy is to make the Plug-in Hybrid Electric Vehicle(PHEV)consume more electric energy when running in a certain mileage and less electric energy when driving in power maintenance process.Based on UDC driving conditions[7],the simulation tests of a hybrid electric vehicle under different modes are carried out.The simulation results are shown in Fig.1 and Fig.2.

Fig.1 Change rate of SOC in different modes
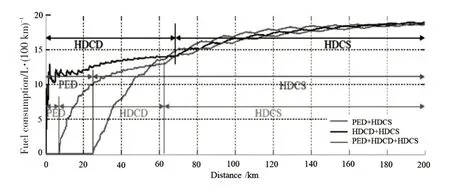
Fig.2 Relationship between driving distance and fuel consumption in different modes
As is shown in Fig.1 and Fig.2,PED is the pure electric drive mode,HDCD is the hybrid charge depleting mode,and HDCS is the hybrid charge sustaining mode.Fig.1 reflects the change rate ofSOCrelative to time in different modes,and Fig.2 reflects the relationship between driving mileage and fuel consumption in different modes.
The above figures show that no matter the combination of HDCD and HDCS or the combination of PED,HDCD and HDCS,the fuel consumption is always lower than that of PED and HDCS.Therefore,in the development of HCU control strategy,it is necessary to make the plug-in hybrid electric vehicle consume as much electric energy as possible before the end of the mileage,and then make the high-voltageSOCreach the lower limit at the end of the mileage.In the HDCD mode,the longer the vehicle travels,the less the fuel is consumed.In the HDCS mode,the longer the vehicle travels,the more fuel is consumed.
The fuzzy control strategy is used to optimize the energy distribution strategy of PHEV,and the pre-driving mileage is used as an input in the HCU controller.The pre-driving mileage is classified according to the distance.The establishment of the fuzzy rule base is based on the following principle:when the membership degrees of speed,torque andSOCare the same,if the pre driving mileage is longer,the weight of the torque provided by the motor in the energy distribution will be lower.The purpose of control strategy is to enable PHEV to avoid excessive and premature consumption of electricity under the condition of fixed mileage,so as to avoid being forced to increase the proportion of electricity maintenance mode in long-distance mileage.In the short mileage driving process,when the required torque is determined,the motor is more likely to provide driving force to increase the consumption of electric energy.These control methods are used to optimize the energy management of vehicles during driving.
4.2 Control Strategies of Hybrid Power Energy Distribution
Different controls and algorithms can be used to optimize the energy distribution strategies of PHEV vehicle power[8-9].The predicted mileage is used as an input in the HCU controller,and the predicted mileage length is divided into different levels.The formulation of control rules is based on the following principles:when the membership degrees of speed,torque andSOCare the same,the predicted driving mileage will be longer,and the weight of torque provided by the motor in the energy distribution will be lower.
The purpose of the control strategy is to make PHEV vehicle avoid excessive and premature consumption of high-voltage battery power under certain driving mileage conditions,so as to avoid being forced to increase the use proportion of charge sustaining mode in long distance mileage.When the required torque is determined during short mileage driving,it is more likely to use the motor to provide driving force and increase the power consumption of the high-voltage battery.
5 Intelligent Energy Management Control Strategy
5.1 Predictive Energy Management Based on Local Driving Road Conditions
During driving both uphill and downhill road based on the analysis of driving routes and road conditions of the navigation,the high-voltage battery energy is used efficiently,and it will increase fuel efficiency.The vehicle shall be controlled to reserve the electric energy of the high-voltage battery before the uphill condition.In addition,sufficient energy recovery space is reserved for vehicles before downhill operation[10].
HCU adjusts the pure electric driving and charging strategies according to the information:route gradient information,slow driving zones and target zone.As is shown in Fig.3,when it is predicted that there is a short distance and a small gradient ahead,it can be realized through strategies to avoid unnecessary engine starting.

Fig.3 Control strategy for short distance and small slope
As is shown in Fig.4,when it is predicted that there is a long distance and a medium gradient ahead,it can be realized through strategies to start the engine in advance.

Fig.4 Control strategy for long distance and medium slope
As is shown in Fig.5,when it is predicted that there is a large slope ahead,the strategy can be used to shift gears and start the engine in advance.The intelligent control strategy based on advance prediction uses the navigation device information to judge when the vehicle should charge the high-voltage battery and how much it should be charged,so as to minimize fuel consumption[11].For example,according to the road slope information provided by the navigation device,when the vehicle is going to pass a hillside,the motor is used to drive the vehicle when the vehicle is going uphill to reduce the fuel consumption of the engine.When the vehicle is going downhill,the energy is fully recovered to charge the high-voltage battery.Based on the navigation device information,the control strategy ensures that the power of the high-voltage battery reaches a certain value when the vehicle reaches the top of the slope,and ensures that the energy recovered just fills the high-voltage battery when the vehicle is driven downhill,so as to achieve energy conservation and emission reduction.

Fig.5 Control strategy for large slope
5.2 Predictive Energy Management Based on Global Driving Road Condition
The intelligent energy management control strategy based on driving condition formulates the use method of high-voltage battery power according to the information of navigation and traffic condition,so as to improve the overall energy utilization of the whole driving task.According to traffic lights,speed limit signs,turns,loops and other road information,HCU calculates the best vehicle sliding time based on vehicle status and power source signals,and reminds the driver to release the pedal.The strategy algorithm is developed to control the vehicle to carry out active energy recovery when needed,so as to effectively reduce the frequent participation of mechanical braking and reduce energy wastes.
The development of intelligent energy management strategy based on path planning has been applied to mass production vehicles.For example,for Mercedes Benz S500 hybrid vehicles,different intelligent energy management modes have been developed,including Charge mode and E-Save mode[12].
In the charge mode,the control strategy of the vehicle realizes power generation by adjusting the engine operating point,and pure electric drive is not allowed to operate in this mode.In the E-Save mode,the vehicle's control strategy maintains the balance of batterySOC,when the E-Save mode is activated,and then HCU controls the charging and discharging of the high-voltage battery to achieve the balance ofSOC.
The purpose of global energy management for hybrid electric vehicle is to achieve efficient and full use of electric energy.At present,BMW,Benz and Audi have developed a vehicle energy management modes based on path prediction[13].
According to the user travel planning and road condition prediction of the navigation equipment,HCU obtains the overall driving road condition information or the information of several adjacent road sections,and then HCU carries out global energy management planning through the control strategy based on the selection of vehicle operation mode and the high-voltage batterySOC.Meanwhile,the high-voltage battery feeds back the current available electric energy and actual energy consumption to support the development of closed-loop control.
6 Conclusions
In this paper,the current and future road condition information is obtained according to the navigation system,and the driving conditions are predicted in combination with the driving characteristics.The global energy planning is carried out according to the energy consumption characteristics of the vehicle,the mileage of typical working conditions,and the length of subsequent working conditions.Then,according to the current high-voltage batterySOC,vehicle operation mode and high-voltage battery targetSOC,the hybrid control strategy is developed and analyzed,and finally the intelligent energy management function is realized.
In the future,the energy management strategy should be fully combined with the on-board terminal to develop an intelligent control strategies based on the navigation information.According to the driving task and road condition,the power utilization strategies of each road section should be intelligently planned to improve the energy utilization efficiency.
